一种基于机械臂的真空吸附模组的制作方法
1.本实用新型应用于机械组装技术领域,特别涉及一种基于机械臂的真空吸附模组。
背景技术:
2.随着时代的发展,3c产业渐渐发展为世界性的新兴科技产业,更多高端产品的诞生,导致其自身的组装精度及产量也是在逐步提高,老式的人工组装流水线已经满足不了需求,在频繁重复单一性抓取组装的工作内容中,人员还极易产生工作疲劳,从而影响组装精度及产量,因此在自动化生产中便由机械臂代替人的高负荷作业以实现生产的机械化和自动化。但是,传统组装技术在机械臂频繁的运动状态下并不能保证吸附过程中的稳定性,容易导致产品脱离机械臂。如能设计出一种结构简单并且吸附稳定性高的基于机械臂的真空吸附模组,则能够很好地解决上述问题。
技术实现要素:
3.本实用新型所要解决的技术问题是克服现有技术的不足,提供了一种结构简单并且吸附稳定性高的基于机械臂的真空吸附模组。
4.本实用新型所采用的技术方案是:本实用新型包括安装块、固定块、真空发生器、若干根弹簧、若干块升降板以及若干个吸盘,所述安装块设置在机械臂的活动端,所述升降板滑动配合在所述安装块上,所述固定块设置在所述升降板的底部,所述固定块通过所述弹簧与所述安装块相连接,所述吸盘设置在所述固定块的底部,所述真空发生器设置在所述机械臂上并且与所述吸盘相连通。
5.由上述方案可见,当需要对零部件进行抓取组装时,通过所述机械臂的驱动,本实用新型向下移动直至所述吸盘顶靠在零部件上,确保所述吸盘与零部件紧密接触,从而保证与零部件之间的高气密性,所述弹簧起到缓冲作用,避免损坏零部件,所述升降板滑动配合在所述安装块上,确保了吸附动作的连贯性和稳定性,最后所述真空发生器进行抽真空,为所述吸盘提供吸力,从而稳定吸附零部件,在所述机械臂频繁的运动状态下能够避免零部件的脱离问题。
6.进一步地,所述真空吸附模组还包括工业相机,所述工业相机包括调节板、ccd相机以及光源,所述调节板设置在所述机械臂上并且靠近所述安装块,所述ccd相机和所述光源均设置在所述调节板上,所述ccd相机位于所述光源的上方。由此可见,在本实用新型的取放动作中,所述ccd相机通过拍摄图像来识别零部件位置以及安装位置,从而避免出现吸取偏差以及组装偏差,而在所述光源的作用下,确保所拍图像的高清晰度。
7.进一步地,所述吸盘的数量设置有四个。由此可见,通过设置有四个所述吸盘,大大增强了吸附稳定性。
8.进一步地,所述升降板的数量设置有两块,两块所述升降板分别滑动配合在所述安装块的两侧。由此可见,两块所述升降板分别滑动配合在所述安装块的两侧,确保滑动动
作稳定流畅。
9.进一步地,所述调节板上设置有加强筋。由此可见,在所述加强筋的作用下,使所述ccd相机在所述机械臂的带动下不易产生抖动。
10.进一步地,所述安装块包括抱箍和连接块,所述抱箍锁紧在所述机械臂的活动端,所述连接块设置在所述抱箍的底部,所述升降板滑动配合在所述连接块上,所述固定块通过所述弹簧与所述连接块相连接。
11.进一步地,所述连接块上设置有滑轨,所述升降板上设置有滑块,所述滑块滑动配合在所述滑轨上。
附图说明
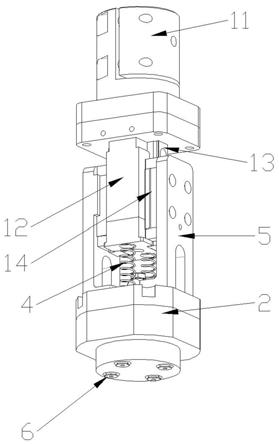
12.图1是本实用新型的立体图;
13.图2是所述工业相机的立体图;
14.图3是本实用新型的应用示意图。
具体实施方式
15.如图1至图3所示,在本实施例中,本实用新型包括安装块1、固定块2、真空发生器3、若干根弹簧4、若干块升降板5以及若干个吸盘6,所述安装块1设置在机械臂的活动端,所述升降板5滑动配合在所述安装块1上,所述固定块2设置在所述升降板5的底部,所述固定块2通过所述弹簧4与所述安装块1相连接,所述吸盘6设置在所述固定块2的底部,所述真空发生器3设置在所述机械臂上并且与所述吸盘6相连通。
16.在本实施例中,所述真空吸附模组还包括工业相机,所述工业相机包括调节板7、ccd相机8以及光源9,所述调节板7设置在所述机械臂上并且靠近所述安装块1,所述ccd相机8和所述光源9均设置在所述调节板7上,所述ccd相机8位于所述光源9的上方。
17.在本实施例中,所述吸盘6的数量设置有四个。
18.在本实施例中,所述升降板5的数量设置有两块,两块所述升降板5分别滑动配合在所述安装块1的两侧。
19.在本实施例中,所述调节板7上设置有加强筋10。
20.在本实施例中,所述安装块1包括抱箍11和连接块12,所述抱箍11锁紧在所述机械臂的活动端,所述连接块12设置在所述抱箍11的底部,所述升降板5滑动配合在所述连接块12上,所述固定块2通过所述弹簧4与所述连接块12相连接。
21.在本实施例中,所述连接块12上设置有滑轨13,所述升降板5上设置有滑块14,所述滑块14滑动配合在所述滑轨13上。
22.在本实施例中,本实用新型的工作原理如下:
23.当需要对零部件进行抓取组装时,通过所述机械臂15的驱动,本实用新型向下移动直至所述吸盘6顶靠在零部件上,确保所述吸盘6与零部件紧密接触,从而保证与零部件之间的高气密性,所述弹簧4起到缓冲作用,避免损坏零部件,所述升降板5滑动配合在所述连接块12上,确保了吸附动作的连贯性和稳定性,最后所述真空发生器3进行抽真空,为所述吸盘6提供吸力,从而稳定吸附零部件,在所述机械臂15频繁的运动状态下能够避免零部件的脱离问题。
24.在本实用新型的取放动作中,所述ccd相机8通过拍摄图像来识别零部件位置以及安装位置,从而避免出现吸取偏差以及组装偏差,而在所述光源9的作用下,确保所拍图像的高清晰度。
技术特征:
1.一种基于机械臂的真空吸附模组,其特征在于:它包括安装块(1)、固定块(2)、真空发生器(3)、若干根弹簧(4)、若干块升降板(5)以及若干个吸盘(6),所述安装块(1)设置在机械臂的活动端,所述升降板(5)滑动配合在所述安装块(1)上,所述固定块(2)设置在所述升降板(5)的底部,所述固定块(2)通过所述弹簧(4)与所述安装块(1)相连接,所述吸盘(6)设置在所述固定块(2)的底部,所述真空发生器(3)设置在所述机械臂上并且与所述吸盘(6)相连通。2.根据权利要求1所述的一种基于机械臂的真空吸附模组,其特征在于:所述真空吸附模组还包括工业相机,所述工业相机包括调节板(7)、ccd相机(8)以及光源(9),所述调节板(7)设置在所述机械臂上并且靠近所述安装块(1),所述ccd相机(8)和所述光源(9)均设置在所述调节板(7)上,所述ccd相机(8)位于所述光源(9)的上方。3.根据权利要求1所述的一种基于机械臂的真空吸附模组,其特征在于:所述吸盘(6)的数量设置有四个。4.根据权利要求1所述的一种基于机械臂的真空吸附模组,其特征在于:所述升降板(5)的数量设置有两块,两块所述升降板(5)分别滑动配合在所述安装块(1)的两侧。5.根据权利要求2所述的一种基于机械臂的真空吸附模组,其特征在于:所述调节板(7)上设置有加强筋(10)。6.根据权利要求1所述的一种基于机械臂的真空吸附模组,其特征在于:所述安装块(1)包括抱箍(11)和连接块(12),所述抱箍(11)锁紧在所述机械臂的活动端,所述连接块(12)设置在所述抱箍(11)的底部,所述升降板(5)滑动配合在所述连接块(12)上,所述固定块(2)通过所述弹簧(4)与所述连接块(12)相连接。7.根据权利要求6所述的一种基于机械臂的真空吸附模组,其特征在于:所述连接块(12)上设置有滑轨(13),所述升降板(5)上设置有滑块(14),所述滑块(14)滑动配合在所述滑轨(13)上。
技术总结
本实用新型旨在提供一种结构简单并且吸附稳定性高的基于机械臂的真空吸附模组。本实用新型包括安装块、固定块、真空发生器、若干根弹簧、若干块升降板以及若干个吸盘,所述安装块设置在机械臂的活动端,所述升降板滑动配合在所述安装块上,所述固定块设置在所述升降板的底部,所述固定块通过所述弹簧与所述安装块相连接,所述吸盘设置在所述固定块的底部,所述真空发生器设置在所述机械臂上并且与所述吸盘相连通。本实用新型应用于机械组装技术领域。域。域。
技术研发人员:陈泽凡 马力 罗婷 周忠宝
受保护的技术使用者:珠海市运泰利自动化设备有限公司
技术研发日:2020.12.02
技术公布日:2021/11/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1