一种气动驱动的仿蛇形软体机器人
1.本发明属于软体机器人技术领域,涉及一种气动驱动仿蛇形软体机器人。
背景技术:
2.软体机器人的出现和快速发展为人机交互和复杂特种环境下传统机器人难以克服的安全性和灵活性等问题提供了新的解决思路。软体机器人主要以硅橡胶、水凝胶等软质材料作为本体,其运动主要依靠机器人本身的变形实现,因而具有内在的高度灵活性、良好顺应性、出色的适应性和自然安全的可交互性。软体机器人从驱动方式上分为绳拉驱动、气动或者液压驱动、智能材料驱动、化学反应驱动等,而气动软体机器人则最早被应用于软体机器人的设计中,并且由于其重量轻、效率高、无污染、环境适应强等特点一直受到研究者的广泛关注和研究。狭长臂式结构的软体机器人在介入手术、灾难救援、狭小制造空间检测等领域具有较好的应用前景,但同时也是软体机器人设计与制造的技术难点。
3.软体机器人最为核心和基本的关键技术就是软体驱动器,钟国梁等人在申请号为cn201910308264.6的中国发明专利中公开了“一种变刚度软体蛇形臂”,它包括若干节可拆卸连接为一体的刚柔单元,刚柔单元包括刚性端板、软体气动人工肌肉群、超弹性多杆机构和限位隔板,能够实现柔顺弯曲运动能力。但是,该装置只能实现单方向的运动,灵活性不够高。王贺升等人在申请号为cn201610153942.2的中国发明专利中公开了“一种气动多囊式软体机器人”,能够实现曲面的爬行等运动,但对于运动的方向控制性较差。
技术实现要素:
4.本发明针对现有技术软体机器人存在的问题,发明了一种气动驱动仿蛇形软体机器人。该装置具有仿蛇形的狭长结构,可实现超冗余自由度的灵活动作。机器人本体采用硅橡胶一类软弹性材料浇铸制造而成;设计基于塑性材料(尼龙、pla等)的连接环结构,实现仿蛇形软体机器人的径向变形约束,气囊致动器连接及致动器气路转接。设计了一种可轴向膨胀分布式波纹气囊致动器结构,实现仿蛇形软体机器人在空间中的灵活弯曲运动,运动性能良好。结构紧凑,成本低。
5.本发明采用的技术方案是一种气动驱动仿蛇形软体机器人,它由仿蛇形软体机器人本体1、波纹式气囊致动器2、连接环3、气动快速插拔接口4、连接气管5组成。
6.所述的仿蛇形软体机器人本体1是由硅胶材料组成的柱状弹性体,其沿轴向方向加工有三排连接孔101,每排有m个,且三排连接孔沿圆周方向呈120度分布;
7.所述波纹式气囊致动器2由可伸缩的波纹状气腔201和进气管202构成;进气管202在波纹状气腔201侧面;进气管202安装在机器人本体1的连接孔101中,波纹式气囊致动器2用于控制仿蛇形软体机器人本体1左右偏航和上下俯仰两个方向上的弯曲运动;
8.所述连接环3主体形状为环形,环形上有呈120度布置的三个固定卡套301,每个固定卡套301上有通气孔302和环形连接头303;连接环3与其上的固定卡套301、通气孔302、环形连接头303采用整体浇注成形;连接环3内圈与仿蛇形软体机器人主体1相配合,实现对仿
蛇形软体机器人径向的限位;固定卡套301与进气管202配合,防止在进气过程中与波纹式气囊制动器2发生错位,避免进气管202漏气;通气孔302两侧与气动快速插拔接口4相配合;
9.所述气动快速插拔接口4连接气源与连接环上的通气孔302;实现通气孔302与气源之间的密封,防止气体泄漏;
10.所述连接气管5与通气孔302两侧的气动快速插拔接口4连接,将m个连接环3轴向连接在一起轴向定位,并构成进气通道;
11.将波纹式气囊致动器2、连接环3、气动快速插拔接口4和连接气管都固定好后,进行整体浇注成形,最终形成一个气动驱动仿蛇形软体机器人。
12.本发明的有益效果在于设计了一种气动驱动仿蛇形软体机器人,采用了波纹式的气囊结构,实现对仿蛇形软体机器人的多自由度运动控制。采用浇注方式将波纹式气囊致动器结构与仿蛇形软体机器人主体一体成形,制造过程简单、快捷。通过连接环对仿蛇形软体机器人的径向进行限位,采用波纹式气囊致动器控制完成对仿蛇形软体机器人的轴向弯曲运动。通过不同方向的进气操作可以实现气动驱动仿蛇形软体机器人多方向的运动。仿蛇形软体机器人结构简单、紧凑,制造方便、成本低。运动性能良好,控制精度较高,操作性强。
附图说明
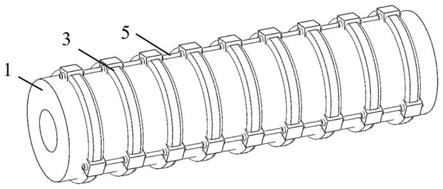
13.图1为本发明所述的一种气动驱动仿蛇形软体机器人的结构示意图。其中,1—仿蛇形软体机器人本体,3—连接环,5—连接气管。
14.图2为本发明所述的仿蛇形软体机器人主体结构示意图。其中,1—仿蛇形软体机器人主体,101—连接孔。
15.图3为本发明所述的连接环装配体结构示意图。2—波纹式气囊致动器,201—波纹状气腔,202—进气管,3—连接环,301—固定卡套,302—通气孔,303—环形连接头,4—气动快速插拔接口。
16.图4为本发明所述的波纹式气囊致动器正常状态结构示意图。
17.图5为本发明所述的连接环结构示意图。3—连接环,301—固定卡套,302—通气孔,303—环形连接头。
具体实施方式
18.下面将结合附图和技术方案详细说明本发明的实施方式。
19.一种气动驱动仿蛇形软体机器人,如图1所示。机器人由仿蛇形软体机器人主体1、波纹式气囊致动器2、连接环3、气动快速插拔接口4、连接气管5组成。其中,一节仿蛇形软体机器人主体1为柱状弹性体,长为186mm,外径为40mm,内径为20mm。仿蛇形软体机器人主体1沿圆周方向间隔120度嵌入了三个波纹式气囊致动器2,沿轴向并列嵌入了九个波纹式气囊致动器2,总共27个波纹式气囊致动器2。
20.所述仿蛇形软体机器人主体1,如图2所示,仿蛇形软体机器人主体1由硅胶材料制成,具有较高的弹性以及延展性,其上具有27个连接孔101。当通过气源对位于同一列九个波纹式气囊致动器2进气时,随着气压的增大,九个波纹式气囊致动器2沿着轴向方向伸长。此时位于同侧的柱状弹性体1也会沿着轴向发生形变,由于另外两侧基本没有形变量,最终
导致柱状弹性体沿着某一个方向发生弯曲变形,从而推动仿蛇形软体机器人在各种环境中的弯曲运动。通过圆周方向上的三个波纹式气囊致动器2可以实现对柱状弹性体左右和俯仰两个自由度的运动控制。
21.所述波纹式气囊致动器2,如图3、4所示。波纹式气囊致动器2由波纹状气腔201以及进气管202组成。波纹状气腔201结构为可伸缩的矩形结构,截面为矩形,长为6mm,高8mm。进气管202位于波纹状气腔201的侧面,它嵌入连接孔101中,并伸出到仿蛇形软体机器人主体1的外部。当利用外部气源通过进气管对波纹状气腔201进气时,波纹状气腔201只能沿仿蛇形软体机器人主体1的轴向方向伸长膨胀,导致仿蛇形软体机器人主体1在轴向方向上不断伸长变形,由于只有单侧的伸长变形,仿蛇形软体机器人主体1两侧产生形变差,从而出现仿蛇形软体机器人主体1弯曲运动的现象。
22.所述连接环3结构如图3、5所示,连接环3上有三个固定卡套301、每个固定卡套上有通气孔302和环形连接头303。连接环3的制作方式为首先制作一个包含固定卡套301、通气孔302、环形连接头303在内的整体模具,通过浇注的方式让连接环3一体成形。每个固定卡套301通过环形连接头303与进气管202相连接,通气孔302两端分别与气动快速插拔接口4连接配合,形成密闭通道,用来提供气源的进气通道。
23.一个连接环3周向与三个波纹式气囊致动器2连接,总共九个连接环3共连接27个波纹式气囊致动器2。连接环3用来对柱状弹性体1进行径向限位,避免柱状弹性体在径向方向上发生不必要形变。
24.气动快速插拔接口4选用型号为pu
‑
4的4mm标准零件,气动快速插拔接口4一端与环形连接头303与进气管202相连接配合,另一端与连接气管5连接,构成气动通道。
25.将波纹式气囊致动器2、连接环3、气动快速插拔接口4都固定好后,采用浇注方式将连接环3、仿蛇形软体机器人主体1、波纹式气囊致动器2一体浇注成形,最终形成一个气动驱动仿蛇形软体机器人。整个装置结构紧凑,制作方便,运动性能良好,控制精度较高,操作性强。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1