一种智能送物机器人的制作方法
1.本发明涉及机器人技术领域,特别涉及一种智能送物机器人。
背景技术:
2.服务机器人在世界范围内具有很大的发展潜力,在世界范围内,中国、美国、日本、韩国、德国等主要国家均在着力发展机器人。尤其是在发达国家,人工成本较高、老龄化严重的地区,服务机器人更是拥有着广阔的应用空间,服务机器人相对于工业机器人而言,更加贴近终端的用户,更贴近人,服务机器人的受众群体也更加广泛,由于服务行业本身特点千差万别,因此,服务机器人在功能、种类、特点方面也更加多样。从某种意义上说,服务机器人的市场空间比工业机器人更为广阔。服务机器人可以在很多领域代替人类,做更多重复性劳动。
3.室内服务型机器人的应用场景复杂,例如,酒店场景中的智能机器人,可以对接自动货柜,实现全流程的无人配送服务,也可实现送外卖、引领客人到房间等服务,但是,现有的机器人室内路径规划多集中于二维空间,顾及三维空间多楼层的路径规划研究相对较少。
技术实现要素:
4.本发明提供了一种智能送物机器人,包括识别模块、盛物箱、控制器、路径规划模块和行动轮,通过识别模块读取nfc智能卡信息,以获取待送物品的目的地,并规划送物路径,同时通过具有自动夹持架构的盛物箱,保证物品运送的稳定性。
5.本发明的技术方案为:
6.一种智能送物机器人,包括:
7.至少一个识别模块,其能够识别nfc智能卡信息,以获取目的地信息;
8.至少一个盛物箱,其具自夹持机构;
9.控制器,其设置在识别模块和盛物箱之间,能够根据nfc智能卡信息弹开盛物箱;
10.路径规划模块,其连接识别模块,能够根据机器人位置和目的地信息,基于路径优化模型生成送物路径;
11.行动轮,其连接路径规划模块,能够根据送物路径行走。
12.优选的是,还包括:
13.激光雷达,其能够获取环境点云;
14.红外摄像头,其能够获取障碍物影像;
15.避障模块,其连接激光雷达和红外摄像头,能够根据环境点云实时绘制和/或更新环境地图,并根据障碍物影像进行障碍物识别和局部避障路径规划。
16.优选的是,盛物箱包括:
17.箱体,其具有电磁锁;
18.箱门,其可转动设置在箱体一侧,且具有电磁扣,电磁扣与电磁锁电磁配合,能够
将箱体关闭,并在控制器的控制下自动弹开箱门;
19.盛物板,其可滑动设置在箱体内;
20.伸缩气缸,其设置在箱体和盛物板之间,能够驱动盛物板沿箱体滑动;
21.自夹持机构,其可转动设置在箱体内,位于盛物板上方,且一端与伸缩气缸连接。
22.优选的是,自夹持机构包括:
23.第一夹持杆,其可转动设置在箱体内;
24.第一夹块,其设置在第一夹持杆一端;
25.第二夹持杆,其可转动设置在箱体内,且与第一夹持杆对称设置;
26.第二夹块,其设置在第二夹持杆的一端;
27.弹簧,其一端连接第一夹持杆另一端,另一端连接第二夹持杆另一端;
28.第一联动杆,其一端与伸缩气缸铰接,另一端与第一夹持杆铰接;
29.第二联动杆,其一端与伸缩气缸铰接,另一端与第二夹持杆铰接;
30.其中,伸缩气缸伸缩能够带动第一夹持杆和第二夹持杆转动,以使第一夹块和第二夹块彼此靠近或远离。
31.优选的是,第一联动杆和第二联动杆均包括:
32.第一拉杆;
33.第二拉杆,其与第一拉杆铰接,伸缩气缸伸缩能够改变第一拉杆和第二拉杆的夹角。
34.优选的是,目的地信息包括:房间号、楼层和位置。
35.优选的是,路径优化模型包括:
36.基于bim技术构建机器人行动区域建筑信息模型并标记关键节点,建立多层室内路网;
37.采用遗传算法,在机器人位置和目的地位置之间生成多条通路;
38.根据评价函数计算多条通路的评价指数,并将最小评价指数对应的通路作为送物路径。
39.优选的是,关键节点包括大厅、服务台、电梯、扶梯、走廊、客房和转折点。
40.优选的是,最小评价指数计算公式为:
[0041][0042]
其中,表示评价指数函数,表示取最小值,表示距离评价权值,表示距离成本函数归一值,表示路径拥堵等级评价权值,表示路径拥堵等级函数归一值,表示时间评价权值,表示时间成本函数归一值。一种智能送物机器人的使用方法,基于上述的智能送物机器人,包括:
[0043]
将nfc智能卡靠近机器人的识别模块;
[0044]
机器人获取nfc智能卡信息和目的地信息,进行送物路径规划,并弹开盛物箱,启动伸缩气缸,将盛物板滑出盛物箱;
[0045]
将待送物品放在盛物板上,将盛物板收回盛物箱,同时自动夹持机构夹紧待送物品;
[0046]
关闭盛物箱,机器人沿送物路径行走,以将待送物品送达目的地。
[0047]
本发明的有益效果是:
[0048]
1、本发明通过获取nfc智能卡信息,确定目的地进而规划送物路径,控制机器人沿送物路径行走,实现实现全流程的无人送物功能,大大节约了时间成本和人工成本。
[0049]
2、本发明设计了具有自夹持机构的盛物箱,通过伸缩气缸推动盛物板向盛物箱外侧滑动,同时第一夹块和第二夹块彼此远离,方便将待送物品放在盛物板上,通过伸缩气缸将盛物板拉回盛物箱的同时,第一夹块和第二夹块彼此靠近,将待测物品夹持,增加了装置的联动性,同时保证了送物的稳定性。
[0050]
3、本发明设计了一种路径优化模型,以评价指数为约束条件,充分考虑垂直路段和垂直路段的路程与时间、拥堵等级的目标成本,科学高效。
附图说明
[0051]
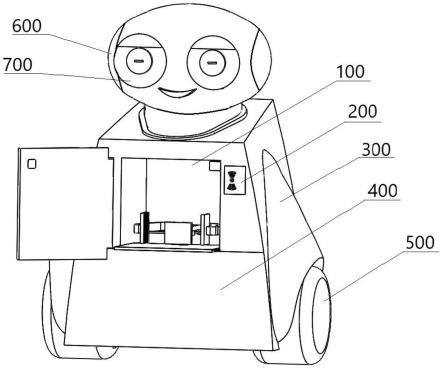
图1为本发明的提供的一种智能送物机器人结构示意图。
[0052]
图2为本发明的一个实施例中盛物箱的结构示意图。
[0053]
图3为本发明的一个实施例中盛物箱的内部结构示意图。
[0054]
图4为本发明的一个实施例中自夹持机构的结构示意图。
[0055]
图5为本发明的提供的一种智能送物机器人的使用方法流程图。
具体实施方式
[0056]
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0057]
需要说明的是,在本发明的描述中,术语“中”、“上”、“下”、“横”、“内”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0058]
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
[0059]
如图1所示,一种智能送物机器人包括盛物箱100、识别模200、控制器300、路径规划模块400和行动轮500。
[0060]
识别模块200能够识别nfc智能卡信息,以获取目的地信息,盛物箱100具自夹持机构,控制器300设置在识别模块200和盛物箱100之间,能够根据nfc智能卡信息弹开盛物箱100,路径规划模块400连接识别模块200,能够根据机器人位置和目的地信息,基于路径优化模型生成送物路径,行动轮500连接路径规划模块,能够根据送物路径行走。
[0061]
其中,目的地信息包括房间号、楼层和位置。
[0062]
作为一种优选,识别模块200至少为一个,盛物箱100至少为一个,识别模块200和
盛物箱100对应设置,数量相同,且识别模块200设置在机器人主体的明显区域。
[0063]
进一步的,路径优化模型通过下列步骤构建:
[0064]
首先,基于bim技术构建机器人行动区域建筑信息模型并标记关键节点,建立多层室内路网。
[0065]
bim技术的核心是建筑信息的共享和转换,因此,以bim技术为基础建立建筑信息模型,可以实现建筑的可视化和集成信息,纠正三维世界和二维图像之间的偏差,以3d形式呈现建筑物的内部结构特征,也能更方便地进行构件信息的提取,依据建筑物室内的实际信息,通过revit软件可快速建立bim建筑信息模型;
[0066]
选取大厅、服务台、电梯、扶梯、走廊、客房和转折点等作为平面路网的关键节点,将扶梯口或电梯口抽象为单层路网与单层路网的连接节点,将相邻的空间单元由上下层的连接节点连接,根据层数建立纵向的建筑层关联,为室内路网构建从水平到垂直的拓扑关系。根据送物机器人的行走特点,设定连接节点之间的路径方向为双向。
[0067]
然后,采用遗传算法,在机器人位置和目的地位置之间生成多条通路。
[0068]
遗传算法解决路径规划问题思路是以编码的方式将多个相邻节点组合,即使用染色体代表可能的路径,本发明基于遗传算法的路径规划是将染色体的第1个基因编码作为路径的起点,在指定种群数下随机初始化种群;
[0069]
以机器人位置为起始节点,目的地位置为终止节点,设定遗传算法相关参数,包括种群大小、最大进化代数、变异概率、交叉概率、代沟,融合广度优先搜索策略得到多条通路。
[0070]
最后,根据评价函数计算多条通路的评价指数,并将最小评价指数对应的通路作为送物路径。
[0071]
求解路径最短问题可以转化为求解路径的所有垂直路段和水平路段距离成本总和最短问题,跨楼层路径距离成本最短目标函数如下:
[0072][0073]
其中,g1表示距离成本函数,n1表示垂直路段数量,包括扶梯和直梯,n1表示水平路段数量,表示垂直路段距离,表示水平路段距离;
[0074]
在室内路规划中,人流拥挤情况是影响路径选择的重要因素,本发明,将拥挤程度分为扬中拥挤、中度拥挤、轻度拥挤和畅通4类情况,路径拥挤等级函数为:
[0075][0076]
其中,g2表示拥堵成本函数,表示垂直路段距离,表示水平路段距离,ρ∈[0,1,2,3,4],0表示畅通,1表示轻度拥挤,2表示中度拥挤,3严重拥挤;
[0077]
同时,还要考虑时间对路径规划的影像,时间成本目标函数为:
[0078][0079]
其中,g3表示时间成本函数,表示垂直路段时间,表示水平路段时间;
[0080]
由于上述函数值的量纲不一致,将三者进行归一化处理,在多种目标权衡下,进一
步的优化最小评价指数计算公式为:
[0081][0082]
其中,g表示评价指数函数,min表示取最小值,ω1表示距离评价权值,表示距离成本函数归一值,ω2表示路径拥堵等级评价权值,表示路径拥堵等级函数归一值,ω2表示时间评价权值,表示时间成本函数归一值。
[0083]
在另一个实施例中,一种智能送物机器人还包括激光雷达600、红外摄像头700和避障模块。
[0084]
其中,激光雷达600能够获取环境点云,红外摄像头700能够获取障碍物影像,避障模块连接激光雷达600和红外摄像头700,能够根据环境点云实时绘制和/或更新环境地图,并根据障碍物影像进行障碍物识别和局部避障路径规划。
[0085]
由于送物机器人的行驶区域可能为酒店等室内空间,空间内的设施可能发生变化,导致路径规划出现偏差,或存在障碍物等,通过激光雷达600识别环境点云,可以绘制具体的环境地图,为机器人送物路径规划提供准确地依据,同时,在机器人每次行走时,实时获取环境点云,并与环境地图进行比对,可实时更新环境地图,通过红外摄像头700也可高效识别路劲上的障碍物,并通过计算准确规避。
[0086]
如图2-3所示,盛物箱包括箱体110、箱门120、盛物板130、伸缩气缸140和自夹持机构150。
[0087]
其中,箱体110具有电磁锁111,箱门120可转动设置在箱体110一侧,且具有电磁扣121,电磁扣121与电磁锁111电磁配合,能够将箱体110关闭,并在控制器的控制下自动弹开箱门120,盛物板130可滑动设置在箱体110内,伸缩气缸140设置在箱体110和盛物板130之间,能够驱动盛物板130沿箱体110滑动,自夹持机构150可转动设置在箱体110内,位于盛物板130上方且一端与伸缩气缸140连接。
[0088]
作为一种优选,还包括弹簧,其设置在所示箱体110和箱门120之间,当箱门120向箱体110转动靠近时,电磁扣121与电磁锁111电磁配合将箱体110关闭,弹簧压缩,当nfc智能卡靠近识别模块200时,识别模块读取nfc智能卡信息,若信息与目的地信息一致,控制器控制电磁扣121与电磁锁111解除配合,在弹簧的弹力作用下,将箱门120弹开。
[0089]
如图4所示,自夹持机构150包括第一夹持杆151、第二夹持杆152、弹簧153、第一夹块154、第二夹块155、第一联动杆156和第二联动杆157。
[0090]
其中,第一夹持杆151可转动设置在箱体110内,第一夹块154设置在第一夹持杆151的一端,第二夹持杆152可转动设置在箱体110内,且与第一夹持杆151对称设置,第二夹块155设置在第二夹持杆152的一端,弹簧153一端连接第一夹持杆151另一端,另一端连接第二夹持杆152另一端,第一联动杆156一端与伸缩气缸140铰接,另一端与第一夹持杆151铰接,第二联动杆157一端与伸缩气缸140铰接,另一端与第二夹持杆152铰接,伸缩气缸140伸缩能够带动第一夹持杆151和第二夹持杆152转动,以使第一夹块154和第二夹块155彼此靠近或远离。
[0091]
作为一种优选,第一联动杆156和第二联动杆157结构相同,均包括第一拉杆和第二拉杆,第一拉杆与第二拉杆铰接,伸缩气缸140伸缩能够改变第一拉杆和第二拉杆的夹角。
[0092]
如图5所示,一种智能送物机器人的使用方法,基于上述的智能送物机器人,包括:
[0093]
s110、将nfc智能卡靠近机器人的识别模块。
[0094]
s120、机器人获取nfc智能卡信息和目的地信息,进行送物路径规划,并弹开盛物箱,启动伸缩气缸,将盛物板滑出盛物箱。
[0095]
s130、将待送物品放在盛物板上,将盛物板收回盛物箱,同时自动夹持机构夹紧待送物品。
[0096]
s140、关闭盛物箱,机器人沿送物路径行走,以将待送物品送达目的地。
[0097]
当机器人将待送物品送达目的地后,用户将nfc智能卡靠近识别模块200,机器人读取nfc智能卡信息,若nfc智能卡信息与存放物品时的信息一致,控制器断开箱体110与箱门120间的电磁配合连接,将箱门120弹开,并启动驱动气缸140将盛物板130推出,同时带动第一夹块154与第二夹块155彼此远离,用户可取出待送物品。
[0098]
以上内容仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不脱离本发明的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1