机械手臂的制作方法
1.本发明涉及自动化技术领域,特别是涉及一种机械手臂。
背景技术:
2.存储罐通常都较为高大,具有较深的罐体,所以在对存储罐进行清理的时,需要在存储罐的外周搭建大型塔架,通过多次弯折移动才能够将长臂机械手吊装入罐体内部,从而对罐体的内部进行清理、维修等维护工作,整个操作过程十分繁琐,作业复杂度高。
技术实现要素:
3.有鉴于此,有必要提供一种改进的机械手臂,通过在机械手臂上设置转动组件与移动组件,使得弯折的机械臂组件在转动组件及移动组件的驱动下伸出所述机械手臂的框体,并能够对罐体内进行打扫、维修等维护工作,以对罐体进行维护。
4.本发明提供一种机械手臂,包括框体,开设有竖直通孔;移动组件,安装于所述框体内,所述移动组件能够沿所述框体内壁移动,所述移动组件包括滑动部;转动组件,所述转动组件固定安装于所述移动组件,且所述转动组件能够相对所述移动组件转动,所述转动组件开设有预设轨迹的滑槽,所述滑动部滑动安装于所述滑槽内,且所述转动组件沿所述滑槽的预设轨迹转动;以及,机械臂组件,所述机械臂组件设置于所述框体内,并固定安装于所述转动组件,所述机械臂组件对应所述通孔设置,所述机械臂组件随所述转动组件转动逐渐由所述通孔伸出所述框体。
5.如此设置,设置移动组件及转动组件,并通过转动组件与移动组件驱动机械臂组件移动,使得机械臂组件伸出框体,以便于对罐体进行清洁。
6.进一步地,所述转动组件包括转动缸体及转动轴,所述转动轴能够相对所述转动缸体转动,所述转动缸体固定安装于所述机械臂组件,所述转动轴的两端固定安装于所述移动组件,以使所述机械臂组件能够相对所述框体转动。
7.如此设置,通过设置转动缸体及转动轴,通过转动缸体与转动轴之间的相对转动,使得转动件能够带动机械臂组件转动。
8.进一步地,转动组件还包括固定架,所述固定架相对的两侧开设有预设轨迹的滑槽,所述移动组件包括固定板,所述固定板对应所述滑槽设有所述滑动部,所述滑动部滑动安装于所述滑槽内,并能够沿所述滑槽滑动,以使所述转动组件沿预设轨迹的所述滑槽滑动。
9.如此设置,通过在固定架上开设预设滑槽,并设置于滑槽相互对应的滑动部,以使转动组件及机械臂组件沿预设轨迹转动。
10.进一步地,所述移动组件包括水平移动单元与竖直移动单元,所述竖直移动单元固定安装于所述框体内部,所述水平移动单元固定安装于所述竖直移动单元,所述转动轴的端部固定安装于所述水平移动单元。
11.如此设置,通过设置水平移动单元与竖直移动单元,使得第一机臂既能够沿边框
水平移动又能够沿边框竖直移动。
12.进一步地,所述竖直移动单元还包括升降电机、升降杆及升降件,所述升降电机设置于所述框体的端部,所述升降杆的一端固定安装于所述升降电机,并随所述升降电机转动,所述升降件套设于所述升降杆,且所述升降件固定安装于所述水平移动单元。
13.如此设置,通过设置升降电极、升降杆及升降件,使得水平移动单元能够通过升降杆及升降件的相互作用沿升降件上升或下降。
14.进一步地,所述竖直移动单元包括第二滑块及第二滑动支架,所述第二滑动支架固定安装于所述框体,所述第二滑块滑动安装于所述第二滑动支架,所述水平移动单元的两端固定安装于所述第二滑块,所述水平移动单元沿所述第二滑动支架滑动。
15.如此设置,通过设置第二滑动支架及第二滑块,以使得水平移动单元能够沿上下滑动。
16.进一步地,所述水平移动单元包括第一滑动支架、第一滑块以及固定板,所述固定板固定安装于所述第二滑块,且所述升降件固定安装于所述固定板,所述第一滑动支架固定安装于所述固定板,所述第一滑块滑动安装于所述第一滑动支架,且所述转动轴的端部固定安装于所述第一滑块。
17.如此设置,使得所述转动组件能够通过第一滑动支架、第一滑块以及固定板相对框体做水平滑动。
18.进一步地,所述机械臂组件包括第一机臂、第二机臂以及第三机臂,所述第一机臂固定安装于所述固定架,所述第一机臂的一端转动连接于所述第二机臂的一端,所述第三机臂转动连接于所述第二机臂的另一端。
19.如此设置,使得第一机臂、第二机臂及第三机臂能够相对弯折,从而能够节省使用空间。
20.进一步地,所述机械臂组件包括伸缩单元,所述伸缩单元设置于所述机械臂组件内,所述伸缩单元包括第一伸缩杆,所述第一伸缩杆设置于所述第一机臂内,且所述第一伸缩杆的一端固定安装于所述第一机臂,另一端转动安装于所述第二机臂;及
21.所述伸缩单元包括第二伸缩杆,所述第二伸缩杆设置于所述第二机臂内,所述第二伸缩杆的一端转动安装于所述第二机臂的一端,另一端转动安装于所述第三机臂。
22.如此设置,通过设置伸缩单元,使得第二机臂能够主动地相对第一机臂转动,使得第三机臂能够主动的相对第二机臂转动。
23.进一步地,所述第一机臂及/或所述第三机臂为伸缩臂。
24.如此设置,提高机械臂组件的活动范围。
25.本发明一种改进的机械手臂,通过在机械手臂上设置转动组件与移动组件,使得弯折的机械臂组件在转动组件及移动组件的驱动下伸出所述机械手臂的框体,并能能够对罐体内进行打扫、维修等维护工作,以对罐体进行维护。
附图说明
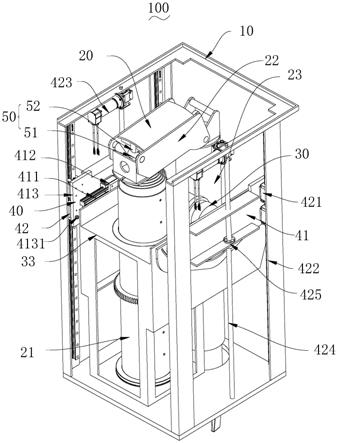
26.图1为本发明提供的机械手臂的结构示意图;
27.图2为图1所示的机械手臂在另一视角的结构示意图;
28.图3为图1所示的机械手臂在另一视角的结构示意图。
29.100、机械手臂;10、框体;20、机械臂组件;21、第一机臂;22、第二机臂;23、第三机臂;30、转动组件;31、转动缸体;32、转动轴;33、固定架;331、滑槽;40、移动组件;41、水平移动单元;411、第一滑动支架;412、第一滑块;413、固定板;4131、滑动部;42、竖直移动单元;421、第二滑块;422、第二滑动支架;423、升降电机;424、升降杆;425、升降件;50、伸缩单元;51、第一伸缩杆;52、第二伸缩杆。
具体实施方式
30.下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
31.需要说明的是,当组件被称为“装设于”另一个组件,它可以直接装设在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。当一个组件被认为是“固定于”另一个组件,它可以是直接固定在另一个组件上或者可能同时存在居中组件。
32.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“或/及”包括一个或多个相关的所列项目的任意的和所有的组合。
33.现有的物料或液体存储罐通常都较为高大,具有较深的罐体,所以在对存储罐进行清理的时,需要在存储罐的外周搭建大型塔架,通过多次弯折移动才能够将长臂机械手吊装入罐体内部,从而对罐体的内部进行清理、维修等维护工作,整个操作过程十分繁琐,作业复杂度高。
34.针对上述技术问题,本发明提供一种改进的机械手臂,通过在机械手臂上设置转动组件与移动组件,使得弯折的机械臂组件在转动组件及移动组件的驱动下伸出所述机械手臂的框体,并能能够对罐体内进行打扫、维修等维护工作,以对罐体进行维护。
35.在本发明中,机械手臂100包括框体10、机械臂组件20、转动组件30以及移动组件40,框体10内部中空,用于容置机械臂组件20;转动组件30固定安装于机械臂组件20,转动组件30用以带动机械臂组件20绕转动组件30转动;移动组件40设置于框体10相对内壁,且转动组件30的两端固定安装于移动组件40,用于带动机械臂组件20沿竖直方向及水平方向移动。
36.需要说明的是,在本实施例中,机械手臂100用于罐体的清洗,但本发明并不限定机械手臂100的使用领域,在其他的实施方式中,机械手臂100还可以用于在狭长场景中的取放物品或用于执行操作动作等技术领域,只要机械手臂100能够达到预设期望即可。
37.在本发明提供的一个实施方式中,框体10用于容置弯折设置的机械臂组件20、转动组件30以及移动组件40。
38.具体地,框体10大致呈镂空状的长方体形,框体10的顶面与一侧侧面相互连通,以防止机械臂组件20在转动的过程中,框体10的顶面与侧面阻挡机械臂组件20转动;与镂空侧边相邻的两侧边中部也是为镂空状的,以便于移动组件40的沿框体10侧边的长度方向移
动;同时,在框体10的顶部开设有通孔,以使的机械臂组件20能够通过该通孔伸出框体10。
39.如此设置,通过将框体10设置为镂空状,以便于在框体10内设置机械臂组件20及移动组件40,且同时便于安装及维修机械手臂100。
40.可以理解,本发明并不仅限于将框体10设置为镂空状长方体形,在其他的实施方式中,还可以将框体10设置成封闭腔室,只要预留出机械臂组件20能够转动的空间即可。
41.在本发明提供的一个实施例中,移动组件40包括水平移动单元41及竖直移动单元42,水平移动单元41用于带动机械臂组件20沿水平方向移动,竖直移动单元42用于带动机械臂组件20沿竖直方向移动。
42.具体地,竖直移动单元42分别安装于框体10相对的两侧,并夹设与顶面相互连通的侧面,竖直移动单元42关于框体10的中心线对称设置,竖直移动单元42包括第二滑块421、第二滑动支架422以及固定板413,第二滑动支架422大致呈长条状,第二滑动支架422的数量设置为两个,两个第二滑动支架422的沿侧面的两侧边框竖直设置,第二滑块421滑动安装于第二滑动支架422,滑块的数量设置为四个,一侧的滑动支架上分别设置有两个滑块;固定板413大致呈长方形,固定板413设置于滑动支架的内侧,固定板413的两端分别安装于两侧滑动支架上的滑块,且固定板413每一端的均固定安装于滑块,使得固定板413能够沿滑动支架滑动。
43.如此设置,通过在框体10的边框上设置滑动支架,并在滑动支架上滑动安装滑块,从而使得固定安装于滑块的固定板413能够沿滑动支架滑动。
44.可以理解,本发明并不限制固定板413与边框的滑动连接方式,在其他的实施方式中,还可以将边框设置为圆柱边框,固定板413的两端设置直线轴承,并将直线轴承套设于圆柱边框,也能够使得固定板413沿圆柱边框升降移动。
45.除此之外,为了能够驱动安装件移动,竖直移动单元42还包括升降电机423、升降杆424以及升降件425,升降电极用于驱动升降杆424转动,升降件425用于与升降杆424相互配合,带动固定板413升降。
46.具体地,升降电极固定安装于设有固定板413的侧部的顶部,升降杆424的一端固定安装于升降电机423的输出端,并沿侧框体10的长度方向设置,且升降杆424的外周设有外螺纹;安装板的中部开设有贯穿安装板的安装孔,升降件425固定安装于安装孔内,且升降件425开设允许升降杆424通过的通孔,且该通孔内设有与升降杆424的外螺纹相互配合的内螺纹,通过升降杆424的外螺纹与升降件425的内螺纹相互配合,使得升降杆424在转动的过程中能够带动固定板413沿升降杆424上升或下降。
47.如此设置,通过设置升降电机423、升降杆424以及升降件425,使得通过升降杆424的转动带动固定板413沿升降杆424的长度方向升降,从而带动机械臂组件20上下移动。
48.可以理解,本发明并不仅限于通过升降杆424与升降件425的螺纹配合使得固定板413随升降杆424的转动而升降,在其他的实施方式中,还可以通过设置气压或液压传动的方式带动固定板413升降。
49.此外,移动组件40还包括水平移动单元41,水平移动单元41分别设置两侧的固定板413,水平移动单元41包括第一滑动支架411、第二滑块421及安装板,第一滑动支架411大致呈长条状,且长度约等于固定板413的长度,第一滑动支架411固定安装于固定板413,第一滑动支架411相对垂直框体10的边框,第二滑块421滑动安装于第一滑动支架411,第二滑
块421的数量设置为两个,两个间隔设置于第一滑动支架411;安装板大致呈长条状,安装板的两端固定安装于第二滑块421,安装板通过第二滑块421沿第一滑动支架411滑动。
50.如此设置,通过在固定板413上设置安装板、第一滑动支架411以及滑块,使得安装板通过件滑块滑动安装于第一滑动支架411。
51.在本发明的一个实施方式中,转动组件30包括转动驱动器及固定架33,转动驱动器的两端分别固定于安装板,且转动驱动器与固定架33固定连接,且转动驱动器用于带动机械臂组件20转动,固定架33用于固定机械臂组件20。
52.具体地,转动驱动器包括转动轴32及转动缸体31,其中转动轴32套设于转动缸体31内,转动轴32能够相对转动缸体31转动,转动轴32的两端固定安装连接于移动组件40的安装板,转动缸体31固定安装于固定架33的顶部;固定架33大致呈长方体,固定架33开设有容置腔,机械臂组件20容置于容置腔内,通过转动驱动器的转动轴32及转动缸体31的相对转动,使得固定架33能够随转动缸体31的转动而转动,从而使得固定架33能够带动机械臂组件20转动。
53.如此设置,通过设置转动驱动器及固定架33,从而能够通过转动驱动器的转动而带动固定架33转动,从而能够带动机械臂组件20转动。
54.可以理解,本发明并不限制固定架33的形状,在其他的实施方式中,固定架33还可以设置为圆柱体形,只要使得固定架33能够固定安装机械臂组件20即可。
55.在本实施例中,机械臂组件20设置于固定架33,机械臂组件20用于伸入罐体内,对罐体的内壁进行清理。
56.具体地,机械臂组件20包括第一机臂21、第二机臂22以及第三机臂23,第一机臂21的一端转动连接于第二机臂22的一端,第二机臂22的另一端转动安装于第三机臂23;第一机臂21与第三机臂23大致呈圆柱状,第一机臂21的一端固定安装于固定架33的底部,以将机械臂组件20固定安装于固定架33,第一机臂21的另一端固定安装有第一铰接件,该第一铰接件呈三棱柱状,第一铰接件铰接于第二机臂22的一端,使得第一铰接件能够相对第二机臂22转动,第三机臂23的一端固定安装有第二铰接件,该第二铰接件也大致呈三棱柱状,且第二铰接件铰接于第二机臂22的另一端,使得第二铰接件能够相对第二机臂22转动,从而便于第一机臂21与第三机臂23能够相对弯折,减少机械臂组件20的容置空间,使得机械臂组件20能够容置于框体10内。
57.可以理解,本发明并不仅限机械臂组件20通过第一机臂21、第二机臂22以及第三机臂23的相互弯折实现减少占用空间,在其他的实施方式中,还可以设置多个铰接件或伸缩件,只要能够减少机械臂组件20的存储空间即可。
58.为了使得第一机臂21能够按照预设的翻转路线进行翻转,固定架33与固定板413相对的两侧面开设有弯折滑槽331,固定板413的一端设有容置于滑槽331内的滑动部4131,滑动部4131与滑槽331相互配合,用于使得第一机臂21能够沿弯折滑槽331的路径翻转。
59.具体地,安装有第一机臂21的固定架33开设有弯折的滑槽331,固定板413的一端设有滑动部4131,滑动部4131设置于固定架33中,使得第一机臂21在翻转的过程中能够沿着预设的滑槽331路径移动,其中,以凸轮槽滚轮为全局坐标系xy的原点(xo,yo),转动组件30的中心轴线位置为局部坐标系x’y’的旋转原点(xr,yr),肘部两个关节的坐标点分别为(x1,y1)、(x2,y2),两点间距离为s,第二机臂22(x2,y2)到旋转原点(xr,yr)的距离为定值
r,且在局部坐标系x’y’中与y’轴的夹角为定值β。可以将前述凸轮翻转机构的目标描述为:局部坐标系x’y’在全局坐标系中旋转并平移,已知其角速度为ω,则θ=ωt,当θ《90度时,肘部与主杆之间的夹角固定不变,当θ≥90度时,由于肘部关节是自由的,肘部将保持垂直,而不再随主杆的旋转而变化,在旋转过程中,需保持x1不变,即前臂始终竖直向下,也即得到滑槽331的路径为当θ《90度时,
△
x=-s*cos(α+ωt)-xr0-r*sin(ωt-β);当θ≥90度时,
△
x=s*sin(α)-xr0-r*sin(ωt-β)。
60.除此之外,为了使得机械臂组件20能够主动地弯折和伸直,机械臂组件20包括伸缩单元50,伸缩单元50包括第一伸缩杆51与第二伸缩杆52,第一伸缩杆51固定安装于第一机臂21内,用于驱动第一机臂21与第二机臂22的相对弯折和相对伸直;第二伸缩杆52设置于第二机臂22的内部,用于驱动第二机臂22于第三机臂23之间的相对弯折和相对伸直。
61.具体地,在本实施例中,第二机臂22大致呈长方体性,且第二机臂22内部中空,第二机臂22相对靠近第一机臂21的端部分别第一铰接柱与第二铰接柱,该第一铰接柱与第二铰接柱连接第二机臂22相对的内壁,第一机臂21的内部沿轴向方向开设有容置腔,第一伸缩杆51安装于容置腔内,第一伸缩杆51的一端固定安装于第一机臂21的容置腔内壁,第一伸缩杆51的另一端转动安装于第二机臂22的第一铰接柱,通过第一伸缩杆51的伸缩,使得第二机臂22的能够相对第一机臂21转动;第二铰接件设有与第二铰接柱相互平行的第三铰接柱,第二伸缩杆52设置于第二机臂22内,第二伸缩杆52的一端转动安装于第二铰接柱,第二伸缩杆52的另一端转动安装于第三铰接柱,通过第二伸缩杆52的伸缩,以使第三机臂23能够相对第二机臂22转动。
62.如此设置,通过设置连接第一机臂21与第二机臂22的第一伸缩杆51以及连接第二机臂22以第三机臂23的第二伸缩杆52,使得第二机臂22及第三机臂23能够相对第一机臂21主动弯折。
63.可以理解,本发明并不仅限于通过伸缩杆的方式驱动第二机臂22于第三机臂23的转动,在其他的实施方式中,还可以通过在第一机臂21与第二机臂22的连接位置处设置相互啮合的齿轮,通过齿轮的转动以驱动第二机臂22相对第一机臂21的转动;及通过在第二机械臂与第二机臂22的连接位置处设置相互啮合的齿轮,通过齿轮的转动以驱动第三机臂23相对第二机臂22转动;只要能够驱动第二机臂22及第三机臂23相对第一机臂21转动即可。
64.此外,为了能够使得机械臂组件20能够尽可能伸长在安装件内,在本发明的一个实施方式中,将第一机臂21于第三机臂23设置为伸缩机臂,可通过实际的环境需要,将第三机臂23伸入罐体内的具体位置,只要能够达到罐内需要清洁的位置即可。
65.需要说明的是,为了使得机械臂组件20在伸入罐体内后能够在罐体内转动,在本实施例中,固定架33设有转动电机,转动电机的输出轴设有齿轮,设置于固定架33的第一机臂21的外周设有齿轮环,转动电机的齿轮与第一机臂21的外周齿轮环相互啮合,通过转动电机的转动带动第一机臂21及第三机臂23转动,从而便于机械臂组件20伸入罐体内清理罐体的内周壁。
66.以上所述实施方式的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施方式中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
67.本技术领域的普通技术人员应当认识到,以上的实施方式仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围内,对以上实施方式所作的适当改变和变化都落在本发明要求保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1