一种天花板视觉机器人的定位方法与流程
本发明涉及机器人定位,具体涉及一种天花板视觉机器人的定位方法。
背景技术:
1、随着机器人技术的日益成熟,机器人定位技术的手段变得更多样,目前机器人定位技术包括基于视觉传感器定位、基于激光雷达定位和基于惯性导航系统定位等,其中,基于视觉传感器定位的机器人定位技术中主要是通过图像识别路标进行定位,路标可以是环境路标或者是机器人构建的路标,或者是人工布置的路标,目前视觉机器人路标识别及构建技术中存在路标构建不均匀导致视觉机器人定位精度低、定位出错率高的问题,同时,还存在环境特征易混淆,视觉机器人无法准确识别路标导致定位出错的问题。
技术实现思路
1、为解决上述问题,本发明提供了一种天花板视觉机器人的定位方法,采用天花板视觉机器人减轻环境特征复杂易混淆的影响,根据已有路标分布信息确定是否建立新的路标实现路标的均匀建立,并通过对已有路标进行有效检测,提高基于路标的定位精度。本发明的具体技术方案如下:
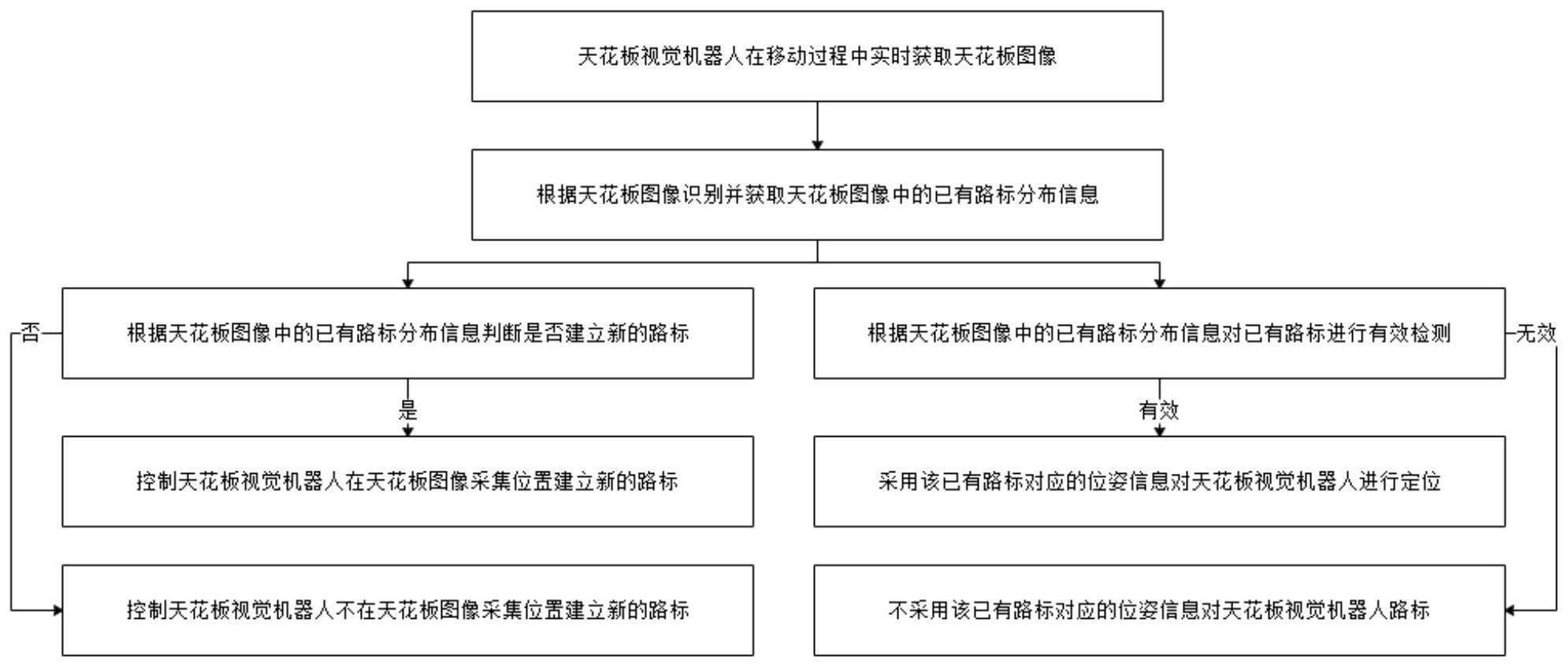
2、一种天花板视觉机器人的定位方法,具体包括:天花板视觉机器人在移动过程中实时获取天花板图像;天花板视觉机器人根据天花板图像识别获取已有路标分布信息;天花板视觉机器人根据已有路标分布信息判断是否建立新的路标,若是,则控制天花板视觉机器人在天花板图像采集位置建立新的路标,若否,则控制天花板视觉机器人不在天花板图像采集位置建立新的路标;天花板视觉机器人根据已有路标分布信息对已有路标进行定位有效监测,若已有路标定位有效,则采用该已有路标对应的位姿信息对天花板视觉机器人进行定位,若已有路标定位无效,则不采用该已有路标对应的位姿信息对天花板视觉机器人进行定位。
3、进一步地,所述天花板视觉机器人根据天花板图像识别获取已有路标分布信息的方法,具体包括:天花板视觉机器人识别天花板图像中是否存在已有路标;若存在,则计算天花板图像中存在的全部已有路标分别与天花板图像采集位置的距离作为已有路标分布信息;若不存在,则计算已建立的全部已有路标分别与天花板图像采集位置的距离,并获取已建立的全部已有路标在建立时分别对应的光照信息,将已建立的全部已有路标分别与天花板图像采集位置的距离和已建立的全部已有路标在建立时分别对应的光照信息作为已有路标分布信息。
4、进一步地,所述天花板视觉机器人识别天花板图像中是否存在已有路标的方法,具体包括:天花板视觉机器人从天花板图像中提取角点特征;将角点特征与已建立的全部已有路标的特征分别进行特征匹配,若存在已有路标的特征与角点特征匹配成功,则确认为天花板图像中存在已有路标,将与角点特征匹配成功的已有路标记录为天花板图像中存在的已有路标,若不存在已有路标的特征与角点特征匹配成功,则天花板图像中不存在已有路标。
5、进一步地,所述天花板视觉机器人根据已有路标分布信息判断是否建立新的路标的方法,具体包括:当天花板图像中存在已有路标,根据获取的已有路标分布信息判断天花板图像中存在的全部已有路标与天花板图像采集位置的距离是否都大于第一距离阈值,若是,则控制天花板视觉机器人在天花板图像采集位置建立新的路标,若否,则控制天花板视觉机器人在天花板图像采集位置不建立新的路标;当天花板图像中不存在已有路标,根据获取的已有路标分布信息判断已建立的全部已有路标中是否存在与天花板图像采集位置的距离小于第二距离阈值的路标,若不存在,则控制天花板视觉机器人在天花板图像采集位置建立新的路标,若存在,则根据获取的已有路标分布信息判断天花板图像对应的光照信息是否与以天花板图像采集位置为中心、半径为第二距离阈值的圆形区域内存在的全部已有路标在建立时对应的光照信息不同,若是,则控制天花板视觉机器人在天花板图像采集位置建立新的路标,若不是,则控制天花板视觉机器人在天花板图像采集位置不建立新的路标。
6、进一步地,所述天花板视觉机器人根据已有路标分布信息判断是否建立新的路标的方法,还包括:当天花板视觉机器人在移动过程中实时观测到天花板图像中不存在已有路标的持续时长达到第一时间阈值时,天花板视觉机器人在天花板图像采集位置建立新的路标。
7、进一步地,所述天花板视觉机器人在天花板图像采集位置建立新的路标的方法,具体包括:天花板视觉机器人在天花板图像采集位置获取并记录新的路标对应的路标信息;其中,所述路标信息包括:天花板视觉机器人在天花板图像采集位置的位姿信息、天花板视觉机器人在天花板图像采集位置的角度信息、路标相对于天花板视觉机器人的位姿信息、天花板视觉机器人获取天花板图像时对应的光照信息、将天花板视觉机器人获取的天花板图像中的角点特征作为路标的特征以及路标的最新观测时刻。
8、进一步地,所述天花板视觉机器人根据已有路标分布信息对已有路标进行定位有效监测的方法,具体包括:当天花板图像中存在已有路标,天花板视觉机器人从天花板图像中存在的全部已有路标中选取其中一个未进行有效检测的已有路标作为当前路标,从当前路标对应的路标信息中获取当前路标对应的第一定位位姿;天花板视觉机器人基于视觉传感器和惯性传感器获取天花板视觉机器人当前的第二定位位姿;判断第一定位位姿和第二定位位姿是否相同;若第一定位位姿和第二定位位姿相同,则确认为当前路标对应的第一定位位姿定位有效;若第一定位位姿和第二定位位姿定位不相同,则计算第一定位位姿和第二定位位姿的第一位姿差值;判断第一定位位姿和第二定位位姿的第一位姿差值是否小于预设差值阈值;若是,则确认为当前路标对应的第一定位位姿定位有效;若否,则根据全部记录的已观测路标计算当前路标的路标定位一致度,判断当前路标的路标定位一致度是否满足路标定位一致度要求,若当前路标的路标定位一致度满足路标定位一致度要求,则确认为当前路标对应的第一定位位姿定位有效,若当前路标的路标定位一致度不满足路标定位一致度要求,则确认为当前路标对应的第一定位位姿定位无效;重复上述步骤,直至将该天花板图像中存在的全部已有路标的定位是否有效分别确认完毕。
9、进一步地,所述根据全部记录的已观测路标计算当前路标定位一致度的方法,具体包括:将当前路标与全部记录的已观测路标进行一一定位一致匹配,统计全部记录的已观测路标中存在的与当前路标定位一致的路标数量,基于全部记录的已观测路标中存在的与当前路标定位一致的路标数量确认当前路标定位一致度。
10、进一步地,所述将当前路标与全部记录的已观测路标进行一一定位一致匹配,统计全部记录的已观测路标中存在的与当前路标定位一致的路标数量的方法,具体包括:步骤1:从全部记录的已观测路标中选取其中一个未进行定位一致匹配的已观测路标作为当前定位一致匹配路标;步骤2:获取当前定位一致匹配路标的观测时刻并获取当前定位一致匹配路标对应的定位位姿;步骤3:计算当前路标对应的第一定位位姿与当前定位一致匹配路标对应的定位位姿的第二位姿差值;步骤4:根据视觉机器人的惯性传感器计算当前定位一致匹配路标的观测时刻至当前路标的观测时刻的时间段内视觉机器人的第一位移距离;步骤5:判断所述第二位姿差值与所述第一位移距离是否相同,若所述第二位姿差值与所述第一位移距离相同,则确认为当前定位一致匹配路标与当前路标定位一致,控制全部记录的已观测路标中存在的与当前路标定位一致的路标数量增加1,若所述第二位姿差值与所述第一位移距离不相同,则确认为当前定位一致匹配路标与当前路标定位不一致,保持全部记录的已观测路标中存在的与当前路标定位一致的路标数量不变;重复执行上述步骤1至步骤5,直至全部记录的已观测路标中不存在未进行定位一致匹配的已观测路标,获取全部记录的已观测路标中存在的与当前路标定位一致的路标数量。
11、进一步地,所述当前路标定位一致度是指所述全部记录的已观测路标中存在的与当前路标定位一致的路标数量达到第一数量阈值;其中,所述第一数量阈值与所述第一位姿差值呈正相关关系。
12、进一步地,当全部记录的已观测路标全部依次遍历定位一致匹配完毕,统计的全部记录的已观测路标中存在的与当前路标定位一致的路标数量为零时,将当前路标记录为已观测路标,并更新全部记录的已观测路标。
13、进一步地,所述将当前路标记录为已观测路标的方法,具体包括:根据当前路标所对应的路标信息,获取并记录当前路标对应的第一定位位姿,同时记录当前路标的观测时刻。
14、进一步地,当已观测路标与当前路标定位一致时,将该已观测路标的观测时刻更新为当前路标的观测时刻。
15、进一步地,当记录的已观测路标的观测时刻距离当前时刻的时长达到第一时间阈值,则将该已观测路标从全部记录的已观测路标中删除,更新全部记录的已观测路标。
16、本发明采用天花板视觉机器人削弱了环境特征复杂易混淆的影响,并根据已有路标分布信息确定是否建立新的路标,实现路标的均匀建立,并通过对已有路标进行多角度的有效检测,确保基于路标的定位有效性,提高基于路标的定位精度。
- 还没有人留言评论。精彩留言会获得点赞!