地(墙)板板材自动切割装置的制作方法
1.本实用新型涉及地(墙)板板材加工技术领域,特别是一种地(墙)板板材自动切割装置。
背景技术:
2.地(墙)板,如木质地(墙)板或复合地(墙)板在表面制作装饰层后,需要按照预定的形状进行切割,使得地(墙)板切割为至少一个相同尺寸的地(墙)板块,方便包装及使用。请参考图1,地(墙)板100上形成有至少一个单元块110,在相邻单元块110之间或单元块110的外侧均具有对位线120,在最外侧的对位线120的外部设置有边缘块130,对位线120用作切割时的参考线。切割时沿对位线120进行切割,从而将地(墙)板100切割为至少一个相同尺寸的单元块110,将边缘块130切割后成为多余的边角料。现有的切割装置沿对位线120切割前,是通过人力将对位线120与切割机的切割路径进行对齐,并用顶针来将地(墙)板100上的对位线120对齐, 尔后, 再启动切割机对地(墙)板100进行切割; 如此操作不但耗费人力, 同时, 在对齐时, 由于人眼的位准毕竟仍是会存在着误差, 特别是在经过一段长时间的操作后, 因为操作工人的疲累, 以致于在对位上会因为疲乏而逐渐的丧失专注力, 以致在对位的误差上会愈来愈大。这种传统的工序在制作成品时会造成许多的麻烦,并且在整体的工作效率上也因为顾虑到人性行为的差异, 而无法有较高的产出。
技术实现要素:
3.有鉴于此,本实用新型提供了一种实现自动对齐、操作简单、工作效率高的地(墙)板板材自动切割装置,以解决上述问题。
4.为达成上述的目的, 本实用新型解决的技术手段是提供一种地(墙)板板材自动切割装置,包括基座、至少一个设置于基座的切割单元、至少一个顶针组件、至少一个定位盘组件、至少一个检测单元及一推料组件;基座的两侧分别设置有一为进料口和一出料口;至少一个定位盘组件位于靠近进料口一侧; 检测单元设用于识别顶针组件及地(墙)板上的对位线,并判断对位线是否与切割单元重合;一控制器与检测单元、顶针组件、定位盘组件、切割单元及推料组件均连接。
5.进一步地,所述顶针组件包括第一气缸及与第一气缸的输出端连接的顶针。
6.进一步地,所述定位盘组件包括一第二气缸及与第二气缸的输出端连接的定位盘。
7.进一步地,所述定位盘为橡胶盘。
8.进一步地,所述至少一个切割单元同轴地设置于一驱动轴上,驱动轴转动地设置于基座上。
9.本实用型亦可采用以下的实施方式来具体实施欲达成的功效:
10.本实用新型在于提供一种地(墙)板板材自动切割装置,其特征在于:包括:
11.一基座;
12.至少一个设置于基座的切割单元;
13.至少一个设置于基座上, 用于对齐, 并固定位在地(墙)板板材上对位线的顶针组件;
14.至少一个设置于基座上, 且用以在顶针组件吻合并固定地(墙)板板材一端后, 将整个地(墙)板板材固定的定位盘组件;
15.至少一个检测单元; 其中, 检测单元用于识别顶针组件及地(墙)板板材上的对位线是否吻合,并判断对位线是否与切割单元重合;及
16.一控制器与检测单元、顶针组件、定位盘组件及切割单元连接, 以控制切割单元进行切割。
17.进一步地, 本实用新型的地(墙)板板材自动切割装置中, 所述顶针组件包括安装于基座上的第一气缸及与第一气缸的输出端连接的顶针。
18.进一步地, 本实用新型的地(墙)板板材自动切割装置中,所述定位盘组件包括安装于基座上方第二气缸及与第二气缸的输出端连接的定位盘。
19.进一步地, 本实用新型的地(墙)板板材自动切割装置中, 所述定位盘为橡胶盘。
20.进一步地, 本实用新型的地(墙)板板材自动切割装置中, 所述推料组件活动地设置于基座的底部。
21.进一步地, 本实用新型的地(墙)板板材自动切割装置中, 所述检测单位是为一电子式或红外线式。
22.与现有技术相比,本实用新型的地(墙)板板材自动切割装置包括基座、至少一个设置于基座的切割单元、至少一个设置于基座底部的顶针组件、至少一个设置于基座下方的定位盘组件、至少一个设置于基座的检测单元及一推料组件。顶针组件设置于靠近出料口的底部且位于切割口的正上方;至少一个定位盘组件位于靠近进料口;检测单元设置于靠近出料口的底部,用于识别切割口及地(墙)板上的对位线,并判断对位线是否与切割口重合;一控制器与检测单元、顶针组件、定位盘组件、切割单元及推料组件均连接。如此实现自动对齐、操作简单、工作效率高。
附图说明
23.以下结合附图描述本实用新型的实施例,其中:
24.图1为习用地(墙)板的俯视示意图。
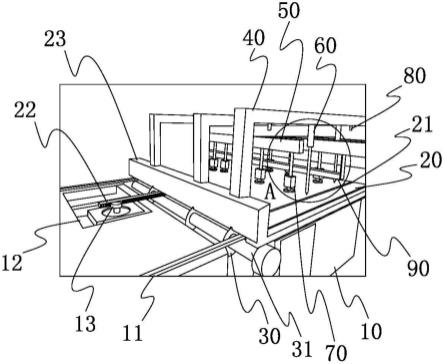
25.图2为本实用新型提供的地(墙)板板材自动切割装置的第一视角的局部立体示意图。
26.图3为图2中的a部分的放大示意图。
27.图4为本实用新型提供的地(墙)板板材自动切割装置的第二视角的局部立体示意图。
28.图5为本实用新型提供的地(墙)板板材自动切割装置的局部侧面示意图。
具体实施方式
29.以下基于附图对本实用新型的具体实施例进行进一步详细说明。应当理解的是,此处对本实用新型实施例的说明并不用于限定本实用新型的保护范围。
30.请参考图2,本实用新型提供的地(墙)板板材自动切割装置包括基座10、位于基座10上的托板20、至少一个设置于托板20下方的切割单元30、至少一个设置于托板20上方的第一横梁40、至少一个设置于于第一横梁40下方的第二横梁50、至少一个设置于第一横梁40下方的顶针组件60、至少一个设置于第二横梁50下方的定位盘组件70、至少一个设置于第一横梁40底部的检测单元80及设置于第二横梁50下方的推料组件90。
31.托板20的两侧分别突出设置有侧挡块23,托板20未设置侧挡块23的另外两侧分别作为进料口和出料口。第一横梁40与进料口或出料口平行。
32.托板20的正下方开设有切割口21,切割单元30固设于切割口21的下方且部分地突出于切割口21, 并朝向第二横梁40方向延伸。
33.第一横梁40的两端分别通过一立柱与侧挡块23连接。
34.第二横梁50与第一横梁40相垂直。
35.本实施方式中,顶针组件60数量为2个,2个顶针组件60设置于靠近第一横梁40的一侧,且顶针组件60位于切割口21的上方。至少一个定位盘组件70位于第一横梁40之间。
36.检测单元80设置于第一横梁40的底部,且靠近侧挡块23的位置。检测单元80用于识别切割口21及地(墙)板100上的对位线120,并判断对位线120是否与切割口21重合。其中, 检测单元80可以是电子式或是红外线式的传感器。
37.其中一种实施方式中,托板20固定设置于基座10上,一平移机构驱动切割单元30沿切割口21移动,从而将切割单元30沿切割口21进行切割。
38.另一中实施方式中,至少一个切割单元30同轴地设置于一驱动轴31上,驱动轴31转动地设置于基座10上,驱动轴31与侧挡块23平行。一切割驱动单元驱动驱动轴31转动,从而带动至少一个切割单元30转动。切割单元30为锯片。基座10上设置有至少一个与第一横梁40平行的第一导轨11,托板20与第一导轨11滑动连接。托板20的底部固定设置有齿条22,基座10上开设有开口12,开口12处设置有电机,电机的输出端从开口12处伸出,电机的输出端固定套设有一齿轮13,齿轮13与齿条22啮合,电机驱动齿轮13转动,从而带动齿条22及托板20沿第一导轨11移动。
39.请参考图3,顶针组件60包括安装于第一横梁40的底部的第一气缸61及与第一气缸61的输出端连接的顶针62。
40.至少一个第二横梁50包括两个平行的定位盘安装横梁51及平行地位于两个定位盘安装横梁51之间的导轨安装横梁52。
41.定位盘组件70包括安装于定位盘安装横梁51的底部的第二气缸71及与第二气缸71的输出端连接的定位盘72,定位盘72为橡胶盘,以便可与地(墙)板100柔性、弹性地接触,避免损伤地(墙)板100。
42.第二气缸71通过一安装柱73与定位盘安装横梁51的底部连接。
43.推料组件90活动地设置于导轨安装横梁52的底部。
44.请参考图3至图5,推料组件90包括垂直连接于导轨安装横梁52两端的底部的连接块91、连接于导轨安装横梁52两端的连接块91之间的第二导轨92、与第二导轨92滑动连接的滑动块93、用于驱动滑动块93沿第二导轨92滑动的滑动驱动单元(未显示)、设置于滑动块93底部的安装板94、安装于安装板94上的升降驱动单元95及与升降驱动单元95的输出端连接的推块96。
45.升降驱动单元95的输出端穿过安装板94且位于安装板94的下方。一控制器与检测单元80、顶针组件60(具体为第一气缸61)、定位盘组件70(具体为第二气缸71)、切割单元30(具体为切割驱动单元)、平移机构或电机及推料组件90(具体为滑动驱动单元、升降驱动单元95)连接; 如此, 当控制器在接受到来自检测单元80的检测信号后, 则发出信息通知定位盘组件70对位在基座上的地(墙)板板材予以整体固定, 其后, 则是由切割单元30对地(墙)板板材切割。切割完成, 则再由推料组件90将切完成, 并具有较小尺寸的地(墙)板板材自出料口一侧推出。
46.更详细的说明则是当检测单元80识别出切割口21及地(墙)板100上的对位线120,并判断对位线120与切割口21重合时,控制器先控制顶针组件60动作,使得顶针62向下移动顶住并固定地(墙)板100,之后控制定位盘组件70动作,使得定位盘72向下移动并与地(墙)板100抵接,再控制顶针62向上移动,之后控制切割单元30沿对位线120对地(墙)板100进行切割。
47.于一种实施方式中,控制器控制平移机构及切割单元30工作,使得切割单元30沿切割口21移动,切割单元30同时转动,从而沿对位线120对地(墙)板100进行切割。
48.在另一种实施方式中,控制器控制电机及切割单元30工作,齿轮13转动,从而带动齿条22及托板20沿第一导轨11移动,同时切割单元30转动,从而沿对位线120对地(墙)板100进行切割。
49.切割完成后,控制器控制定位盘72向上移动,以松开地(墙)板100,再控制升降驱动单元95工作,使得推块96向下移动,推块96移动至地(墙)板100远离出料侧的外侧,控制器再控制滑动驱动单元工作,使得滑动块93沿第二导轨92朝向出料侧移动,从而将地(墙)板100从托板20上推出。
50.托板20的出料侧的外侧设置有废料收集盒,废料收集盒远离托板20的一侧设置有接收托板,接收托板用于承接切割后的地(墙)板100。
51.本实用新型提供的地(墙)板板材自动切割装置还包括位于托板20的进料侧外部的自动上料机构200,自动上料机构200包括储料箱210、水平且活动地位于储料箱210中的活动托板220、设置于储料箱210的下方且用于驱动活动托板220上下移动的顶料驱动单元230、设置于储料箱210上方的上料横梁240、设置于上料横梁240底部的上料组件250及突出设置于侧挡块23朝向储料箱210的端面上的地(墙)板感应器260。
52.顶料驱动单元230的输出轴与活动托板220的底部连接,至少一个待切割的地(墙)板100层叠于活动托板220上。
53.上料组件250的结构与推料组件90相同,地(墙)板感应器260位于托板20的上方,具体地,地(墙)板感应器260的高度与托板20上的地(墙)板100平齐,用于感应活动托板220上最顶层的地(墙)板100。
54.地(墙)板感应器260为任何可适用的光电感应器。
55.控制器与顶料驱动单元230、地(墙)板感应器260及上料组件250均连接。
56.当需要供料时,顶料驱动单元230驱动活动托板220向上移动,当地(墙)板感应器260感应到地(墙)板100时,控制器控制顶料驱动单元230停止工作,同时控制上料组件250工作,上料组件250将最顶层的地(墙)板100推动至托板20上。
57.与现有技术相比,本实用新型的地(墙)板板材自动切割装置包括基座10、位于基
座10上的托板20、至少一个设置于托板20下方的切割单元30、至少一个平行且间隔设置于托板20上方的第一横梁40、至少一个平行且间隔设置于于第一横梁40下方的第二横梁50、至少一个设置于第一横梁40底部的顶针组件60、至少一个设置于第二横梁50下方的定位盘组件70、至少一个设置于第一横梁40底部的检测单元80及设置于第二横梁50下方的推料组件90;托板20的两侧分别突出设置有侧挡块23,托板20未设置侧挡块23的另外两侧分别作为进料侧和出料侧;第一横梁40与进料侧或出料侧平行;托板20分别于每一第一横梁40的正下方开设有切割口21,切割单元30位于切割口21的下方且部分地突出于切割口21;第二横梁50与第一横梁40相垂直;顶针组件60设置于靠近出料侧的第一横梁40的底部且位于切割口21的正上方;至少一个定位盘组件70位于靠近进料侧的第一横梁40与靠近出料侧的第一横梁40之间;检测单元80设置于靠近出料侧的第一横梁40的底部,用于识别切割口21及地(墙)板100上的对位线120,并判断对位线120是否与切割口21重合;一控制器与检测单元80、顶针组件60、定位盘组件70、切割单元30及推料组件90均连接。如此实现自动对齐、操作简单、工作效率高。
58.以上仅为本实用新型的较佳实施例,并不用于局限本实用新型的保护范围,任何在本实用新型精神内的修改、等同替换或改进等,都涵盖在本实用新型的权利要求范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1