一种基于3D操纵杆的工业机器人示教编程系统及方法
一种基于3d操纵杆的工业机器人示教编程系统及方法
技术领域
1.本发明涉及工业机器人技术领域,尤其是一种基于3d操纵杆的工业机器人示教编程系统及方法。
背景技术:
2.现如今对于工业机器人,在完成相应的机械化自动化生产之前,示教是一个必不可少的过程。传统的工业机器人的示教方式主要有两种:离线编程示教与示教器直接示教。离线编程示教,是技术人员利用特定的离线编程软件根据任务需求对机器人进行编程示教,并生成机器人程序,此方法的效率较高,但是离线编程需要借助特有的编程软件,通用性比较差;示教器示教,是操作人员利用示教器对机器人进行逐点示教,操作繁琐、效率低、人机交互较差,并且对操作人员也有一定的操作技能的要求,很难满足目前工业机器人的要求。
3.而目前现有的示教方法发明专利中,有部分利用视觉进行示教的方法,虽然能够降低操作人员的门槛以及增强人机协作的友好性,但是对于机器人与环境交互的信息只存在位置和速度,对于其他环境刚度、接触力等信息并没有在示教过程中进行体现,而部分基于特定机器人的直接示教方式虽然提高了人机协作能力,但是对于应用场景和领域限制较大。
4.综上所述,传统示教方法存在操作复杂、效率低、通用性差、人机交互麻烦的缺点,而现有的示教方法任然存在环境交互性不够,应用场景限制较大的不足。
技术实现要素:
5.本发明提出一种基于3d操纵杆的工业机器人示教编程系统及方法,使得机器人示教更直观、简易,效率更高。并且根据使用场景要求,可以设置特定的任意轴联动的机器人工作状态,拥有通用性更高、更简便的机器人示教方法。
6.本发明采用以下技术方案。
7.一种基于3d操纵杆的工业机器人示教编程系统,包括3d操纵杆、主控制器、工业机器人和力传感器;所述3d操纵杆可接受沿x、y、z轴三个相互垂直方向的移动操作,以及绕x、y、z轴三个相互垂直轴的转动操作;所述工业机器人包含至少具有3个自由度的机械臂和机器人控制器;所述机械臂的底座设有基座坐标系,所述机械臂的末端设有工具坐标系;所述力传感器安装于所述机械臂末端;所述3d操纵杆和力传感器与所述主控制器输入电气连接;所述主控制器与所述工业机器人控制器输出电气连接;所述3d操纵杆沿x轴的移动操作控制所述工具坐标系在基座坐标系x轴的移动;所述3d操纵杆沿y轴的移动操作控制所述工具坐标系在基座坐标系y轴的移动;所述3d操纵杆沿z轴的移动操作控制所述工具坐标系在基座坐标系z轴的移动;所述3d操纵杆绕x轴的转动操作控制所述工具坐标系绕基座坐标系x轴的转动;所述3d操纵杆绕y轴的转动操作控制
所述工具坐标系绕基座坐标系x轴的转动;所述3d操纵杆绕z轴的转动操作控制所述工具坐标系绕基座坐标系z轴的转动;所述力传感器用于检测所述机械臂末端受力;所述工业机器人控制器根据机械臂末端受力来限制机械臂的运动。
8.所述机械臂末端安装有力传感器;所述力传感器与所述主控制器电气连接;所述工业机器人控制器根据3d操纵杆的操作以及所述力传感器的检测数据,控制机械臂所述工具坐标系在所述基座坐标系的运动。
9.一种基于3d操纵杆的工业机器人示教编程系统的示教和示教再现方法,所述工业机器人机械臂末端的工具坐标系为笛卡尔坐标系;所述系统的示教编程过程包括以下步骤;步骤s1,在空间绝对坐标系中,建立3d操纵杆三个方向的移动和转动与对应工业机器人机械臂末端笛卡尔坐标系下的移动和转动的映射关系,并通过计算转换将3d操纵杆各方向的移动、转动范围与机器人的工作范围一一对应;步骤s2,在机器人笛卡尔坐标系下,根据控制算法,设计基于接触力的位置控制环,实现机器人机械臂与环境交互时的接触力稳定;步骤s3,建立概率学模型,对示教过程的机器人动作轨迹数据进行处理,修正在示教过程中的偶然误差和人为误差;步骤s4,操作3d操纵杆改变工业机器人的位姿,具体为:操作人员通过预先设定3d操纵杆与工业机器人末端位置的映射关系与功能,操作3d操纵杆,改变机器人机械臂末端坐标得到需要的位姿;步骤s5,采集示教轨迹,具体为:利用3d操纵杆控制机器人在工作范围内移动,当移动到需要的轨迹起始点后,通过引导程序中的存储功能,将后续的轨迹点实时发送至上位机,由上位机进行存储;步骤s6,判断示教是否结束;如果没有则继续操作3d操纵杆对机器人进行示教,如果结束则通过程序结束示教,进行下一步操作;步骤s7,对示教轨迹进行复现,具体为:操作人员在示教完所需轨迹后,点击人机交互界面上的示教再现按钮,使机器人按照存储的轨迹执行复现示教动作,完成指定任务。
10.所述方法通过在3d操纵杆上预设定的功能按键来控制工业机器人的运行与急停,以及控制工业机器人的运动模式。
11.所述示教和示教再现方法根据不同的示教需求,针对每个所述3d操纵杆按键与摇杆来设置控制工业机器人的具体参数。
12.所述步骤s2的控制算法引入模糊控制,以保证工业机器人与外界环境交互过程中的安全性。
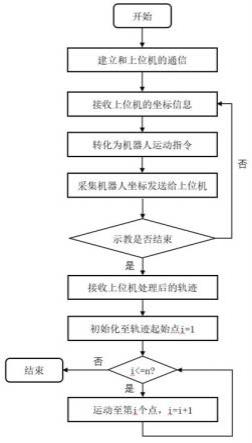
13.所述步骤s5的引导程序,具体步骤如下:步骤a1、建立与上位机的通信;步骤a2、接收上位机发送的位置信息;步骤a3、控制机器人运动到相应位置;步骤a4、实时存储机器人的位置信息并发送给上位机;步骤a5、判断示教是否结束;
步骤a6、如否,返回,继续进行示教;步骤a7、如是,获取上位机处理后的示教轨迹;步骤a8、由机器人对示教轨迹数据进行复现,设i表示第i个轨迹点,初始化i=1;步骤a9、i逐步递进增1,使机器人逐步递进运动到第i个轨迹点,直至所有示教轨迹处理结束。
14.所述步骤s2中采用阻抗控制算法,利用力传感器检测的受力数据和机械臂位置进行闭环控制,使机器人在与外界交互的过程中的接触力能稳定在阈值范围内,以保证人机交互的安全性。
15.主控制器可设置机械臂的运动边界,步骤s7中,主控制器对输入的轨迹位置进行判断,如果下一步轨迹点位置超出运动边界的限位,则机械臂不会继续运行。
16.步骤s3中,概率学模型为高斯混合模型。
17.与现有技术相比,本发明公开的一种基于3d操纵杆的工业机器人示教方法,其操作简易,易于实现,引入了控制算法能够保证机器人与外界环境交互的安全性,提升人机交互友好性,针对示教轨迹也通过概率学模型进行修正,能够在保证示教特征的基础上提高示教再现的精确性;并且3d操纵杆和上位机的连接可以采用无线连接,可以实现远距离的操作;并且针对不同的工业机器人只需要修改不同的引导程序,通用性高。
18.本发明提出一种基于3d操纵杆的工业机器人示教编程系统及方法,利用上位机连接3d操纵杆和工业机器人控制器,通过上位机程序控制3d操纵杆对工业机器人在笛卡尔坐标系下进行示教和示教再现。所述上位机程序包括人机交互程序和引导程序,所述人机交互程序的功能是对3d操纵杆的操纵杆和机器人末端坐标的映射关系的设定以及按钮的功能实现,所述引导程序的功能是连接机器人和上位机,传输坐标数据进行示教并且实时采集机器人末端轨迹。本发明专利提出的示教方法能够在示教过程中实现力和位置的混合控制,保证示教过程中与环境交互的安全性,以及后续对示教轨迹能进行修正,保证示教的准确性。
附图说明
19.下面结合附图和具体实施方式对本发明进一步详细的说明:附图1为本发明的基于3d操纵杆的工业机器人示教和示教再现方法整体结构示意图;附图2a为操纵杆与机器人末端移动位移映射示意图;附图2b为操纵杆与机器人末端转动位移映射示意图;附图3为本发明的基于3d操纵杆的工业机器人示教和示教再现方法整体流程示意图;附图4为上位机人机交互软件流程示意图;附图5为引导程序流程示意图;附图6为工业机器人本体结构示意图。
具体实施方式
20.如图所示,一种基于3d操纵杆的工业机器人示教编程系统,包括3d操纵杆、主控制
器、工业机器人和力传感器;所述3d操纵杆可接受沿x、y、z轴三个相互垂直方向的移动操作,以及绕x、y、z轴三个相互垂直轴的转动操作;所述工业机器人包含至少具有3个自由度的机械臂和机器人控制器;所述机械臂的底座设有基座坐标系,所述机械臂的末端设有工具坐标系;所述力传感器安装于所述机械臂末端;所述3d操纵杆和力传感器与所述主控制器输入电气连接;所述主控制器与所述工业机器人控制器输出电气连接;所述3d操纵杆沿x轴的移动操作控制所述工具坐标系在基座坐标系x轴的移动;所述3d操纵杆沿y轴的移动操作控制所述工具坐标系在基座坐标系y轴的移动;所述3d操纵杆沿z轴的移动操作控制所述工具坐标系在基座坐标系z轴的移动;所述3d操纵杆绕x轴的转动操作控制所述工具坐标系绕基座坐标系x轴的转动;所述3d操纵杆绕y轴的转动操作控制所述工具坐标系绕基座坐标系x轴的转动;所述3d操纵杆绕z轴的转动操作控制所述工具坐标系绕基座坐标系z轴的转动;所述力传感器用于检测所述机械臂末端受力;所述工业机器人控制器根据机械臂末端受力来限制机械臂的运动。
21.所述机械臂末端安装有力传感器;所述力传感器与所述主控制器电气连接;所述工业机器人控制器根据3d操纵杆的操作以及所述力传感器的检测数据,控制机械臂所述工具坐标系在所述基座坐标系的运动。
22.一种基于3d操纵杆的工业机器人示教编程系统的示教和示教再现方法,所述工业机器人机械臂末端的工具坐标系为笛卡尔坐标系;所述系统的示教编程过程包括以下步骤;步骤s1,在空间绝对坐标系中,建立3d操纵杆三个方向的移动和转动与对应工业机器人机械臂末端笛卡尔坐标系下的移动和转动的映射关系,并通过计算转换将3d操纵杆各方向的移动、转动范围与机器人的工作范围一一对应;步骤s2,在机器人笛卡尔坐标系下,根据控制算法,设计基于接触力的位置控制环,实现机器人机械臂与环境交互时的接触力稳定;步骤s3,建立概率学模型,对示教过程的机器人动作轨迹数据进行处理,修正在示教过程中的偶然误差和人为误差;步骤s4,操作3d操纵杆改变工业机器人的位姿,具体为:操作人员通过预先设定3d操纵杆与工业机器人末端位置的映射关系与功能,操作3d操纵杆,改变机器人机械臂末端坐标得到需要的位姿;步骤s5,采集示教轨迹,具体为:利用3d操纵杆控制机器人在工作范围内移动,当移动到需要的轨迹起始点后,通过引导程序中的存储功能,将后续的轨迹点实时发送至上位机,由上位机进行存储;步骤s6,判断示教是否结束;如果没有则继续操作3d操纵杆对机器人进行示教,如果结束则通过程序结束示教,进行下一步操作;步骤s7,对示教轨迹进行复现,具体为:操作人员在示教完所需轨迹后,点击人机交互界面上的示教再现按钮,使机器人按照存储的轨迹执行复现示教动作,完成指定任务。
23.所述方法通过在3d操纵杆上预设定的功能按键来控制工业机器人的运行与急停,以及控制工业机器人的运动模式。
24.所述示教和示教再现方法根据不同的示教需求,针对每个所述3d操纵杆按键与摇杆来设置控制工业机器人的具体参数。
25.所述步骤s2的控制算法引入模糊控制,以保证工业机器人与外界环境交互过程中的安全性。
26.所述步骤s5的引导程序,具体步骤如下:步骤a1、建立与上位机的通信;步骤a2、接收上位机发送的位置信息;步骤a3、控制机器人运动到相应位置;步骤a4、实时存储机器人的位置信息并发送给上位机;步骤a5、判断示教是否结束;步骤a6、如否,返回,继续进行示教;步骤a7、如是,获取上位机处理后的示教轨迹;步骤a8、由机器人对示教轨迹数据进行复现,设i表示第i个轨迹点,初始化i=1;步骤a9、i逐步递进增1,使机器人逐步递进运动到第i个轨迹点,直至所有示教轨迹处理结束。
27.所述步骤s2中采用阻抗控制算法,利用力传感器检测的受力数据和机械臂位置进行闭环控制,使机器人在与外界交互的过程中的接触力能稳定在阈值范围内,以保证人机交互的安全性。
28.主控制器可设置机械臂的运动边界,步骤s7中,主控制器对输入的轨迹位置进行判断,如果下一步轨迹点位置超出运动边界的限位,则机械臂不会继续运行。
29.步骤s3中,概率学模型为高斯混合模型。
30.实施例:本例中,3d操纵杆可用3d鼠标替代。
31.如图1所示,为本发明的结构图,主要是根据3d操纵杆的操纵杆和按键信息与力传感器的接触力对机器人进行示教控制,其中控制算法、坐标转换计算与对示教轨迹进行处理的概率学模型均封装在上位机中的引导程序和人机交互程序,而3d操纵杆与工业机器人在运动上的映射关系如图2和图2a所示。
32.如图3所示,为本发明的基于3d操纵杆的工业机器人示教方法整体流程图,包括以下步骤:步骤1,在上位机上编写人机交互程序;步骤2,在机器人控制器上编写引导程序;步骤3,建立上位机和机器人直接的连接:例如使用物理网线将上位机和机器人连至同一局域网内,通过网线进行数据传输。
33.步骤4,建立3d操纵杆和上位机的连接,并对3d操纵杆的操作数据进行采集:例如选择有线usb连接,将3d操纵杆连接至上位机,通过相关的程序读取3d操纵杆的操作数据。
34.步骤5,操作3d操纵杆改变机器人的位姿,例如操作人员通过操作3d操纵杆的操纵杆和预定义的功能按键来控制机器人的运动:操作人员在通过3d操纵杆控制机器人位姿时,需要将控制器上机器人运行模式调至自动运行,然后通过控制器上编写的引导程序,使用3d操纵杆对机器人的位姿进行改变。
35.步骤6,按下3d操纵杆上的示教存储按钮开始存储示教轨迹,例如:由步骤5的操作,使机器人在工作范围内任意移动,当移动至轨迹起始点后,按下示教存储按钮,从当前位置开始实时读取机器人末端位置信息,并发送给上位机进行存储。
36.步骤7,判断示教是否结束;如果还需要继续示教则重复步骤5,对未完成的轨迹进行示教和存储,如果结束则进行下一步操作。
37.步骤8,点击运行按钮对处理后的轨迹进行示教再现,例如:上位机将示教过程中的轨迹利用概率学模型处理后,对示教轨迹进行一定的优化,然后发送给机器人控制器,之后操作人员点击人机交互界面上的运行按钮,机器人就会按照处理后的轨迹进行示教再现。
38.整个流程的使用情况描述:操作人员可以通过控制3d操纵杆上的操纵杆与定义好的功能按键对工业机器人的位姿和运行模式及速度进行控制,并且可以通过相应的按键对示教轨迹进行存储,并实时保存至上位机,当示教结束后通过上位机上的人机交互软件,将处理后的轨迹发送给机器人控制器,运行引导程序实现示教轨迹再现。
39.其中,所述步骤1的上位机人机交互软件利用microsoft visual studio 2019编写,如图4所示为软件的整体流程图,该流程图的具体步骤如下:运行程序建立和3d操纵杆的连接;建立和引导程序的连接;采集3d操纵杆操纵杆和按键的数据;采集力传感器的接触力信息;对程序中设定的急停按键进行判断是否复位,若没复位则不对数据进行任何操作,若是已复位则对机器人工作范围进行判断,若是运动超出机器人的工作范围则不进行任何操作,若是位置数据再机器人工作范围内则进行下一步判断;利用阻抗控制,根据传感器的接触力对机器人的运动进行约束;对其他轴进行运行模式判断,是否设置单轴运动还是多轴联动,若是设置了单轴联动,则滤除其他轴的位置信息,将处理后的位置信息发送给引导程序,若是设置了任意轴联动,则滤除设定轴以外的位置信息,将相应的位置信息发送给引导程序;当按下示教存储按键后,开始保存引导程序实时发送的机器人坐标信息;判断示教是否结束,如果结束,则对采集到的示教轨迹通过概率学模型进行处理后发送给引导程序;其中,所述步骤2的在机器人控制器上编写的引导程序采用codesys软件编写,如图5所示为引导程序整体流程图,具体步骤如下:建立和上位机的通信;接收上位机传输的位置信息;控制机器人运动到相应位置;实时存储机器人的位置信息并发送给上位机;判断示教是否结束;如否,返回,继续进行示教过程;如是,获取上位机处理后的轨迹;初始化i=1,i表示第i个轨迹点;
运动到第i个轨迹点,直至所有示教轨迹处理结束。
40.所述引导程序主要包含通信程序和机器人运动程序两部分,通信程序采用的socket与上位机进行通信,所使用的协议为tcp协议,用于接收上位机发送的坐标位置,通过运动程序转换为机器人的运动指令,并且实时采集机器人末端的位置信息,发送给上位机。
41.具体实施方式例如:整个人机交互软件可以分为3d操纵杆数据采集处理模块、通信模块、数据处理模块和人机交互界面模块组成,采用多线程编程从而能够同步运行。在3d操纵杆数据采集处理模块:调用windows自带的api函数进行数据采集,并对采集的到数据根据设定的急停运行模式、单轴多轴联动模式进行数据的预处理;数据处理模块:主要有三个部份,第一部分是提前对3d操纵杆按键进行功能设定,实现3d操纵杆按键对机器人一定的控制能力,第二部分是阻抗控制算法,通过采集到的接触力信息对机器人运动过程中的位置进行闭环控制,保证在人机交互过程中的安全性,第三部分是概率学模型,通过概率学模型将示教轨迹进行后处理,对示教过程中人为误差进行一定的修正;通信模块:主要是利用sokcet和引导程序建立通信后,将处理后的位置信息发送给引导程序,通过引导程序对工业机器人进行运动控制,并且接收引导程序发送的机器人位置信息保存用于示教再现过程;人机交互界面:主要用于显示当前3d操纵杆操纵杆的数据、接触力的大小、急停按键是否复位以及模式选择,便于操作人员对机器人进行示教,还设有运行按钮,用于在概率学模型处理完示教轨迹后,控制引导程序实现示教再现。
42.上位机存储当前的位置信息,通过在vs2019中建立一个六维向量来存储所有示教轨迹的位置信息,经过概率学模型处理后,再通过socket通信将位置信息逐个发给引导程序,通过引导程序控制机器人,完成相应的运动。
43.在数据处理模块中的第一部分的按键功能设定中,设置急停和运行按键,速度加减按钮,可以保证在运行过程中机器人的安全性,并且在程序内也对输入的位置进行判断,如果超出限位则不会继续运行,增强了示教过程的安全性;第二部分采用阻抗控制算法,利用力和位置之间的闭环控制,保证了机器人在与外界交互的过程中的接触力能稳定在一定范围内,保证人机交互的安全性;第三部分引入高斯混合模型,对示教过程中产生的人为误差进行一定的修正,保证了示教再现过程中轨迹能够与预期轨迹一致。
44.3d操纵杆具有无线接收器,通过无线接收器连接至上位机,上位机可以通过相关程序采集其数据。
45.操作者通过3d操纵杆来控制机器人进行示教时,需要先将控制器上的钥匙将机器人的运行模式调至自动模式,然后运行人机交互程序和引导程序,将上位机、引导程序和机器人控制器两两建立连接,随后通过3d操纵杆的操纵杆和预定义的功能按键就能够控制机器人运动出所需的示教轨迹。
46.功能按键可以根据不同的应用场合和操作人员的需求来进行重新定义,如果需要其他的功能可以进一步的进行设置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1