一种基于阿里云物联网的智慧割胶机器人系统实现方法
1.本发明属于割胶机器控制技术领域,具体涉及一种基于阿里云物联网的智慧割胶机器人系统实现方法。
背景技术:
2.随着人类的发展,天然橡胶已经被列为国家战略物资,广泛应用于国民经济建设各个领域,在现代社会中发挥着巨大作用。21世纪,橡胶工业的发展日新月异,但是,一直延续的最为原始又落后的采胶方式,五百年来始终都没有改变过,目前国内外几乎都采用人工割胶。工人们使用手持式割胶工具进行采胶,采集工作量大、难度高、安全性差、效率低,一直是制约其发展的瓶颈。现阶段,橡胶树割胶制度已经较为成熟,而割胶工具仍较为落后着社会的发展和技术的进步,割胶技术也在不断发展。
3.同时,割胶工人们昼伏夜出的进行高强度劳动,各种职业病高发,其中眼睛疾病、胃肠病、风湿类疾病以及妇科病、皮肤病、高血压、腰椎肩周疾病发病率高,使现代胶工不断从胶园中流失。据统计,2014年海南约有20%~30%民营橡胶园停割,其中,屯昌县南吕镇达到50%以上。割胶工人日趋短缺,老龄化问题日趋严重,其中海胶集团割胶工短缺达5000多人,全世界割胶工缺失率已经超过40%。
4.传统割胶成为橡胶生产的瓶颈,远远不能满足我国橡胶种植业的发展,胶园生产作业与管理的机械化、智能化将是未来发展的必然趋势,是改变橡胶产业现状的重要手段之一。基于以上内容,针对橡胶意义重大、割胶工具落后、工人流失严重等问题,本文设计一款基于物联网的智能割胶机器人系统,使割胶工从艰苦的割胶环境中解放出来,促使橡胶产业积极快速发展,具有巨大的实际应用价值和良好的社会意义。
技术实现要素:
5.本发明所要解决的技术问题是针对当下形势研究基于物联网的智能割胶机器人系统,能够通过机器人本体结构在控制系统的支持下实现仿形割胶,并且采集机器人控制信息以及环境信息数据,通过物联网传输数据到云端,机器人也可以接收云端命令启动不同割胶运动。通过机器人自身信息,胶汁重量,气候环境等数据,在云端进行数据挖掘,形成一套完善的割胶策略,进行智慧割胶。
6.本发明的一种基于阿里云物联网的智慧割胶机器人系统的实现方法,包括割胶机器人控制系统、数据采集系统、数据远程监控系统;割胶机器人运动控制系统包括电机控制模块、电机限位模块,电机控制模块与限位模块连接;数据采集系统包括温度采集模块、电压电流采集模块;数据远程监控系统包括网页端阿里云监控模块、手机小程序监控模块,小程序和网页监控模块相连接,电机控制模块和限位模块一起与阿里云相连接。
7.作为优选,利用所述电机的正反转控制割胶机器人割胶刀运动,通过控制所述电机占空比进行调速,通过所述限位开关对割胶刀进行限制,使所述电机完成机械式往返运动,完成一次割胶周期。
8.作为优选,所述温度采集模块采用ntc热敏电阻测量温度,所述ntc热敏电阻的温度使用steinhart-hart方程进行计算,其公式为:式中t代表温度,t0为标称温度,b为beta系数,r是热敏电阻的测量阻值,r0是标称电阻。
9.作为优选,所述电压电流数据采集模块采用ina226电流电压监控器,监控分流器降压和总线电压,可编程校准值、转换时间、取平均值功能连同内置乘法器可以使所述监控器直接读出电流和电压的数值。
10.作为优选,所述割胶机器人系统通过数据监控系统将数据采集,通过所述wifi模块与阿里云物联网平台相连接,并将数据传送到阿里云物联网平台;所述手机小程序和阿里云物联网平台连接,可以获取所述机器人采集到的各项数据,并且可以远程下达控制指令,控制所述割胶机器人上面的电机进行割胶运动。
11.与现有技术相比,本发明的有益效果是:
12.(1)本发明所述割胶机器人与阿里云物联网相结合,实现了一种新式远程控制割胶机器人进行割胶的控制方式,能够解放劳动力,很好的帮助园林主远程控制所述割胶机器人进行割胶。
13.(2)本发明所述数据监控系统,采用ntc热敏电阻,ina226监控器,有效的监控割胶机器人周身的各项数据,方便快捷,相比于目前市场上的割胶机器人更加简单灵活,同时成本更低。
14.(3)本发明所述限位开关对割胶机器人进行限位控制,限制其超出割胶工作范围,使其更加安全,并且每次都回到同一起点,使其更加方便。
15.(4)本发明为所述割胶机器人设计了安全系统,可防止其被盗丢失。
附图说明
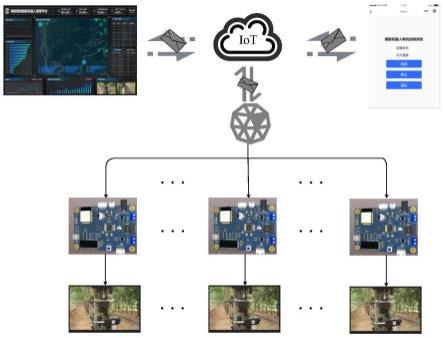
16.图1为本发明的总体系统框图。
17.图2为本发明的硬件系统流程图。
18.图3为本发明的软件系统流程图。
具体实施方式
19.为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图中示出的具体实施例来描述本发明。但是应该理解,这些描述只是示例性的,而并非要限制本发明的范围。本说明书附图所绘示的流程、硬件选型、软件流程等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
20.在此,还需要说明的是,为了避免因不必要的细节而模糊了本发明,在附图中仅仅示出了与根据本发明的方案密切相关的结构和/或处理步骤,而省略了与本发明关系不大
的其他细节。
21.如图1所示,本具体实施方式采用以下技术方案:包括割胶机器人控制系统、数据采集系统、数据远程监控系统;所述割胶机器人运动控制系统包括电机控制模块、电机限位模块,电机控制模块与限位模块连接;所述数据采集系统包括温度采集模块、电压电流采集模块;所述数据远程监控系统包括网页端阿里云监控模块、手机小程序监控模块,小程序和网页监控模块相连接,所述电机控制模块和限位模块一起与阿里云相连接。所述割胶机器人通过数据采集系统将数据进行采集,同时发送到阿里云物联网平台,所述手机小程序和网页端都可实时查看数据。并且所述手机小程序和阿里云物联网平台可以实时控制割胶机器人进行割胶运动。
22.所述割胶机器人硬件系统,首先通过12v锂电池经过lm2956降压模块对割胶机器人系统进行供电,通过所述ntc热敏电阻和ina226模块对温度、电压、功率、电流数据进行监测,所述esp32主控芯片经过l9110s电机驱动芯片对电机进行运动控制,与此同时,所述限位开关对电机终点进行限制,当割胶刀运动到终点时触碰到限位开关,所述限位开关传递信号给主控芯片,所述主控芯片控制电机进行反转使割胶刀回到终点。具体硬件控制流程如图2所示。
23.所述割胶机器人系统对各个模块进行初始化,可以发送电机运行指令,然后读取所述数据监控系统所采集的温度、电压、电流和功率数据,同时所述本地液晶显示示数。所述主控芯片再通过wifi模块发送数据到阿里云物联网平台,所述阿里云物联网平台接收到数据后将其显示在网页和手机端。网页端和手机端在接收数据后也可以发送控制指令控制所述电机运行。具体软件控制流程如图3所示。
24.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
25.此外,以上所述仅为本发明的一个实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1