一种交互式控制排爆机器人
1.本发明涉及机器人技术领域,尤其涉及一种交互式控制排爆机器人。
背景技术:
2.目前,在化工厂、电气厂、山林矿洞等地区中常常存在一些易爆的危险区域,甚至还存在需要进行拆弹和排雷的危险场合,为了排除潜在危险,需要进行排查和拆卸安装的任务,出于人身安全的考虑,往往不能由人工进入危险场合并进行操作。然而常规的机器人灵活性较差,难以实现快速高效的操作,即便要进行操作,通常也要设置大量的、复杂的旋钮按键,控制繁琐,因此远程操作人员不仅要有丰富的拆装排查经验,还要有较好的机器人控制经验,对于人员的经验要求较高。
技术实现要素:
3.本发明要解决的技术问题是克服现有技术的不足,提供一种设置简单、控制方便、操作灵活和降低操作经验要求的交互式控制排爆机器人。
4.为解决上述技术问题,本发明提出的技术方案为:
5.一种交互式控制排爆机器人,包括行走执行装置和遥控装置,行走执行装置和遥控装置通信连接,所述行走执行装置包括小车、夹爪和活动结构仿形手臂的机械臂,夹爪通过机械臂连接在小车上,所述遥控装置包括用于发送小车及夹爪控制信息的遥控器和连接在操作人员手臂处、用于发送机械臂控制信息的动作传感器。
6.作为上述技术方案的进一步改进:
7.所述机械臂包括两根臂杆和三组关节组件,两根臂杆之间、一根臂杆与小车之间以及另一根臂杆与夹爪之间各通过一组关节组件连接,所述关节组件为传动两个连接部件之间的相对回转和/或相对摆动的驱动件。
8.所述关节组件通过单独的驱动件驱动一个轴线上的相对回转或一个铰轴上的相对摆动。
9.所述驱动件的驱动轴处设置有圆盘,所述圆盘与驱动轴垂直且同心,所述驱动件的外部设置有连接架;相邻两组关节组件之间的臂杆,一端沿圆盘的径向连接在一组关节组件的圆盘上,另一端连接在另一组关节组件的连接架上。
10.行走执行装置和遥控装置中均设有控制器,二者的控制器通过无线通信连接;所述动作传感器为陀螺仪,所述陀螺仪将操作人员手臂活动角动量转化为电信号,由遥控装置的控制器发送至行走执行装置,行走执行装置的控制器接收电信号并解析得到各驱动件的输出量,依据输出量控制各关节组件活动。
11.所述夹爪上设有夹爪驱动电机,遥控器通过向行走执行装置的控制器发送信号控制夹爪驱动电机的输出。
12.所述小车包括车体、车轮、履带和车轮驱动电机,车体的顶部连接机械臂,两侧各设有一条履带和多个车轮,履带绕设在各车轮的外部并啮合连接,小车通过车轮驱动电机
驱动车轮滚动驱使履带带动车体前进,遥控器通过向行走执行装置的控制器发送信号控制车轮驱动电机的输出。
13.所述夹爪上设有用于将检测的压力信息发送至遥控装置的压力传感器。
14.交互式控制排爆机器人还包括显示装置,所述行走执行装置还包括用于采集图像信息、并将图像信息发送至显示装置处显示的摄像头,所述遥控装置与摄像头和显示装置通信连接。
15.所述小车上设有设备架,摄像头通过可回转的云台安装在设备架上,所述遥控装置与云台通信连接。
16.与现有技术相比,本发明的优点在于:
17.本发明的交互式控制排爆机器人,包括行走执行装置和遥控装置,行走执行装置和遥控装置通信连接,行走执行装置包括小车、夹爪和活动结构仿形手臂的机械臂,夹爪通过机械臂连接在小车上,通过机械臂的活动实现抓取位置的移动。遥控装置包括遥控器,遥控器用于发送小车及夹爪控制信息,控制夹爪执行抓取或放开,以及控制小车的移动方向。还包括动作传感器,其连接在操作人员手臂处,根据获取的操作人员手臂活动来发送机械臂控制信息,使机械臂的活动方向与操作人员手臂一致,从而达到一种如指臂使的效果,灵活执行操作,提高排爆效率。同时由于操作人员仅按照需要活动手臂就能实现机械臂控制,因此简化了机械臂的操作繁琐程度,降低了操作经验需求。
附图说明
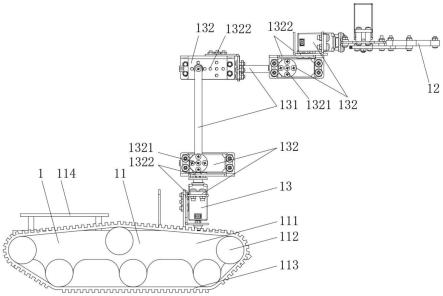
18.图1和图2是本发明的交互式控制排爆机器人的结构示意图。
19.图例说明:1、行走执行装置;11、小车;111、车体;112、车轮;113、履带;114、设备架;12、夹爪;13、机械臂;131、臂杆;132、关节组件;1321、圆盘;1322、连接架。
具体实施方式
20.为了便于理解本发明,下文将结合说明书附图和较佳的实施例对本发明做更全面、细致地描述,但本发明的保护范围并不限于以下具体实施例。
21.实施例:
22.如图1和图2所示,本实施例的交互式控制排爆机器人,包括行走执行装置1和遥控装置,行走执行装置1和遥控装置通信连接,行走执行装置1包括小车11、夹爪12和活动结构仿形手臂的机械臂13,夹爪12通过机械臂13连接在小车11上,通过机械臂13的活动实现抓取位置的移动。遥控装置包括用于发送小车11及夹爪12控制信息的遥控器和连接在操作人员手臂处、用于发送机械臂13控制信息的动作传感器。遥控器可以是带有按键、旋钮等操控点的手柄,用于发送小车11及夹爪12控制信息,控制夹爪12执行抓取或放开,以及控制小车11的移动方向。
23.动作传感器连接在操作人员手臂处,根据获取的操作人员手臂活动来发送机械臂13控制信息,使机械臂13的活动方向与操作人员手臂一致,从而达到一种如指臂使的效果,灵活执行操作,提高排爆效率。同时由于操作人员仅按照需要活动手臂就能实现机械臂13控制,因此简化了机械臂13的操作繁琐程度,降低了操作经验需求。
24.本实施例中,机械臂13包括两根臂杆131和三组关节组件132,两根臂杆131之间、
一根臂杆131与小车11之间以及另一根臂杆131与夹爪12之间各通过一组关节组件132连接,关节组件132为传动两个连接部件之间的相对回转和/或相对摆动的驱动件。这种设置方式仿照人体手臂的结构,将肩部、肘部以及腕部关节仿形为三组关节组件132,将大臂和小臂仿形为两根臂杆131,在操作过程中,由于与人体手臂的连接结构高度近似,因此能够执行对应的手臂活动动作,实现灵活操控。
25.本实施例中,关节组件132通过单独的驱动件驱动一个轴线上的相对回转或一个铰轴上的相对摆动,即当一组关节组件132中既存在回转动作又存在摆动动作时,需要设置两个驱动件分别执行回转和摆动驱动。
26.本实施例中,每个驱动件的外部均设置有用于连接的连接架1322,连接架1322只起到连接作用,因此不拘于具体结构形式。为了实现真实的仿形,每根臂杆131均能在驱动件的驱动下完成摆动动作。因此,用于执行摆动驱动的驱动件中,驱动轴处设置有圆盘1321,圆盘1321与驱动轴垂直且同心,臂杆131的一端沿圆盘1321的径向连接在一组关节组件132的圆盘1321上,另一端铰接连接在另一组关节组件132的连接架1322上。当驱动件回转时,圆盘1321便会带动臂杆131摆动。
27.本实施例中,小车11和臂杆131之间的关节组件132设有两个驱动件,分别执行摆动和回转驱动,其中回转驱动件通过连接架1322连接在小车11上,其轴线沿竖直方向布置并连接摆动驱动件,摆动驱动件通过圆盘1321连接第一根臂杆131。第一根臂杆131和第二根臂杆131之间只设有一个摆动驱动件,该摆动驱动件通过圆盘1321连接第二根臂杆131。第二根臂杆131和夹爪12之间的关节组件132设有两个驱动件,执行两个相互垂直轴线上的回转驱动,以仿照腕部活动,即第一个回转驱动件的输出轴连接第二个回转驱动件,第二个回转驱动件的输出轴连接夹爪12。
28.本实施例中,行走执行装置1和遥控装置中均设有控制器,二者的控制器可以是arduino控制器,并通过无线通信连接;动作传感器为陀螺仪,陀螺仪将操作人员手臂活动角动量转化为电信号,由遥控装置的控制器发送至行走执行装置1,行走执行装置1的控制器接收电信号并解析得到应有的动作量,并将动作量自动划分为各驱动件的输出量,依据输出量控制各关节组件132活动。将动作量划分为各驱动件输出量的方式为arduino控制器可以执行的常规的操作过程,因此不再赘述。
29.本实施例中,夹爪12上设有夹爪驱动电机,遥控器通过向行走执行装置1的控制器发送信号控制夹爪驱动电机的输出,从而驱动夹爪12执行抓取和放开操作。本实施例中,夹爪12采用常规的机械抓取结构,能够实现抓取放开操作即可,在此不做赘述。
30.本实施例中,夹爪12上设有用于将检测的压力信息发送至遥控装置的压力传感器,通过压力传感器的信息可以直接知晓夹爪12是否抓取到位,避免力量太小无法夹取或力量太大损坏夹取物品,确保达到操作效果。
31.本实施例中,小车11包括车体111、车轮112、履带113和车轮驱动电机,车体111的顶部连接机械臂13,两侧各设有一条履带113和多个车轮112,履带113绕设在各车轮112的外部,履带113内侧和车轮112外表面啮合连接,属于常见的行走结构,小车11通过车轮驱动电机驱动车轮112滚动驱使履带113带动车体111前进,遥控器通过向行走执行装置1的控制器发送信号控制车轮驱动电机的输出。
32.本实施例中,机器人还包括显示装置,行走执行装置1还包括用于采集图像信息、
并将图像信息发送至显示装置处显示的摄像头,遥控装置与摄像头和显示装置通信连接,可以控制摄像头和显示装置执行缩放等功能,通过观察显示装置,操作人员可以知晓应该执行的活动方向,从而精准执行排爆工作。本实施例中,可以将显示装置和遥控器手柄设置为一体结构,方便观察操作。
33.本实施例中,小车11上设有设备架114,摄像头通过可回转的云台安装在设备架114上,遥控装置与云台通信连接,通过控制云台回转能够调节摄像头的视野范围。
34.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例。对于本领域的技术人员来说,在不脱离本发明的技术构思前提下所得到的改进和变换也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1