一种人型机器人头部
1.本发明涉及一种人型机器人头部结构。
背景技术:
2.拟人机器人是一种理想型,可与人互动,为人类提供服务,使生活更便捷。随着经济发展,对于拟人机器人的研究越来越深入,而机器人的头部是模拟人类五官最为直接的部件,其研究较为多样。现有的机器人头部装置一般是利用各种驱动元件来驱动机器人头部运动,从而实现拟人机器人头部眼球、眼脸以及嘴部等器官的运动,做出拟人化表情的机械装置。但现有的技术结构较为复杂,且可控性不高。
技术实现要素:
3.本发明是在现有的技术基础上,将机器人嘴巴部件、红晕部件、头部旋转以及眼睛动作组合起来,实现一种新型的结构,最终实现与人之间更和谐的交互,并且使得机器人更类似于人。
4.一种人型机器人头部,其特征在于,包括:头部骨架、眼睛部件、嘴巴部件和整体旋转结构;所述眼睛部件设置在头部骨架的上部两侧;所述嘴巴部件设置在所述头部骨架的中部下侧;所述整体旋转结构设置在所述头部骨架的下部;所述嘴巴部件包括电磁铁、嘴部和固定件,所述电磁铁的伸缩端连接所述嘴部,使所述嘴部伸缩,所述固定件与所述电磁铁的伸缩端相反侧连接。整体旋转结构由舵机和机架构成,用于使所述头部骨架旋转。
5.进一步地,所述头部骨架为t字形结构,其中t自行结构的上部两侧设置有两个相对轨道,所述眼睛部件为两个,分别设置在两个所述轨道上,并于所述轨道滑动连接,可以方便各部件的结合牢固性,还方便眼睛部件的距离移动,满足不同的需求。
6.进一步地,所述眼睛部件包括舵机一、眼睛支架、舵盘一、连接杆、眼球和眼皮;所述眼睛支架的一端在所述轨道内滑动;所述舵机一设置在所述眼睛支架的一端底侧,所述舵机一的驱动端贯穿所述眼睛支架并与所述舵盘一连接,所述舵盘一与所述连接杆的一端连接,所述连接杆的另一端与所述眼皮连接,所述眼皮可旋转地连接于所述眼睛支架的另一端,所述眼球设置在所述眼皮的下方,并于所述眼睛支架的另一端可旋转连接;所述舵机一的旋转带动所述连接杆围绕所述舵盘一转动,所述连接杆带动所述眼皮上下翻转。连接杆可选用三节杆。
7.进一步地,还包括眼睛壳体;所述眼睛壳体覆盖所述眼睛部件,并与所述眼睛支架固定连接,用于保护眼睛部件,其中眼球可以为摄像头,用于观察外部环境,眼皮的设置可以真实地模仿人类。
8.进一步地,所述头部部件的下部设置有向前突出的凹槽部,所述嘴部部件设置在所述凹槽部内,所述固定件固定在所述凹槽部内,所述电磁铁设置在所述凹槽部内,所述嘴部伸出所述凹槽部。固定件为矩形伸缩杆,用以防止电磁铁旋转。上述设置,提高嘴部的结合牢固性,避免嘴部的左右移动。
9.进一步地,还包括红晕部件,所述红晕部件包括红晕支架和led灯,所述led灯与所述红晕支架固定,所述红晕支架与所述头部骨架连接固定,且设置在所述眼睛部件下方。
10.进一步地,所述led灯为橙色led。
11.进一步地,所述嘴部为硅胶制成。
12.进一步地,还包括覆盖在所述头部表面的面部类肌肉部件。
13.本发明通过简单地舵机一的旋转带动连接杆,从而带动机器人眼睛眼皮的上下翻转。将红晕部件设置在眼睛之下,采用红橙色的led灯,用来模仿人脸红腮。机器人嘴部通过电磁铁的前后伸缩运动,可以实现嘴部的突出和收回,且嘴部后部设置有矩形伸缩杆的固定件,用以防止电磁铁旋转。而整体头部骨架下方连接有360度舵机,可以实现整体头部的偏摆旋转运动。头部骨架为t字形结构,其中t自行结构的上部两侧设置有两个相对轨道,所述眼睛部件为两个,分别设置在两个所述轨道上,并于所述轨道滑动连接,可以方便各部件的结合牢固性,还方便眼睛部件的距离移动,满足不同的需求。整体模仿人体头部运动。还包括覆盖在所述头部表面的面部类肌肉部件,用于更真实地模仿人类脸部,提高美观。
附图说明
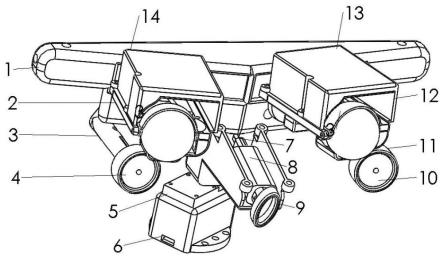
14.图1是本发明的整体结构示意图。
15.图2-1是本发明的头部骨架的立体结构示意图。
16.图2-2是本发明的头部骨架的立体结构背面示意图。
17.图3是本发明的红晕部件的立体结构示意图。
18.图4是本发明的防止电磁铁旋转的固定件立体结构示意图。
19.图5是本发明的单独眼睛张开状态下结构示意图。
20.图6是本发明的单独眼睛闭合状态下结构示意图。
21.其中:1、头部骨架,2、眼睛部件一,3、红晕支架一,4、led灯一,5、舵机二,6、机架,7、固定件,8、电磁铁,9、嘴部,10、led灯二,11、红晕支架二,12、眼睛部件二,13、眼壳二,14、眼壳一,15、舵机一,16、眼睛支架,17、舵盘,18、连接杆,19、眼球,20、眼皮。
具体实施方式
22.以下结合说明附图,对本发明作进一步说明:
23.如图1-6所示,一种人型机器人头部,包括:头部骨架1、眼睛部件2、12、嘴巴部件和整体旋转结构;所述眼睛部件2、12设置在头部骨架1的上部两侧;所述嘴巴部件设置在所述头部骨架1的中部下侧;所述整体旋转结构设置在所述头部骨架1的下部;所述嘴巴部件包括电磁铁8、嘴部9和固定件7,所述电磁铁8的伸缩端连接所述嘴部9,使所述嘴部9伸缩,所述固定件7与所述电磁铁8的伸缩端相反侧连接。整体旋转结构由舵机二5和机架6构成,用于使所述头部骨架1旋转。
24.所述头部骨架1为t字形结构,其中t自行结构的上部两侧设置有两个相对轨道,所述眼睛部件2、12为两个,分别设置在两个所述轨道上,并于所述轨道滑动连接。可以方便各部件的结合牢固性,还方便眼睛部件的距离移动,满足不同的需求。
25.所述眼睛部件2、12包括舵机一15、眼睛支架16、舵盘一17、连接杆18、眼球19和眼皮20;所述眼睛支架16的一端在所述轨道内滑动;所述舵机一15设置在所述眼睛支架16的
一端底侧,所述舵机一15的驱动端贯穿所述眼睛支架16并与所述舵盘一17连接,所述舵盘一17与所述连接杆18的一端连接,所述连接杆为三接杆,所述连接杆18的另一端与所述眼皮20连接,所述眼皮20可旋转地连接于所述眼睛支架16的另一端,所述眼球19设置在所述眼皮20的下方,并于所述眼睛支架16的另一端可旋转连接;所述舵机一15的旋转带动所述连接杆18围绕所述舵盘一15转动,所述连接杆18带动所述眼皮上下翻转。连接杆18可选用三节杆,用于方便眼皮的上下翻转。
26.还包括眼睛壳体13、14;所述眼睛壳体13、14覆盖所述眼睛部件,并与所述眼睛支架固定连接。眼睛壳体13、14用于保护眼睛部件,其中眼球可以为摄像头,用于观察外部环境,眼皮的设置可以真实地模仿人类。
27.所述头部部件1的下部设置有向前突出的凹槽部,所述嘴部部件设置在所述凹槽部内,所述固定件7固定在所述凹槽部内,所述电磁铁8设置在所述凹槽部内,所述嘴部9伸出所述凹槽部。固定件7防止电磁铁8相对凹槽旋转移动。固定件为矩形伸缩杆,用以防止电磁铁旋转。上述设置,提高嘴部的结合牢固性,避免嘴部的左右移动。
28.还包括红晕部件,所述红晕部件包括红晕支架3、11和led灯4、10,所述led灯4、10与所述红晕支架3、11固定,所述红晕支架3、11与所述头部骨架1连接固定,且设置在所述眼睛部件下方。所述红晕支架与红橙色led灯组合后,可模仿人脸红腮.
29.所述led灯为橙色led。
30.所述嘴部9为硅胶制成。
31.还包括覆盖在所述头部表面的面部类肌肉部件。
32.本发明通过简单地舵机一的旋转带动连接杆,从而带动机器人眼睛眼皮的上下翻转;将红晕部件设置在眼睛之下,采用红橙色的led灯,用来模仿人脸红腮;机器人嘴部通过电磁铁的前后伸缩运动,可以实现嘴部的突出和收回,且嘴部后部设置有矩形伸缩杆的固定件,用以防止电磁铁旋转;而整体头部骨架下方连接有360度舵机,可以实现整体头部的偏摆旋转运动。头部骨架为t字形结构,其中t自行结构的上部两侧设置有两个相对轨道,所述眼睛部件为两个,分别设置在两个所述轨道上,并于所述轨道滑动连接,可以方便各部件的结合牢固性,还方便眼睛部件的距离移动,满足不同的需求。整体模仿人体头部运动。还包括覆盖在所述头部表面的面部类肌肉部件,用于更真实地模仿人类脸部,提高美观。
33.以上所述的实施例对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的具体实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1