一种车辆尾门控制方法、系统及车辆与流程
1.本发明涉及车门控制系统,具体涉及车辆尾门控制系统。
背景技术:
2.随着车辆的智能化程度提高,自动开启和关闭尾门成为越来越多车辆的必要的功能设计。现有技术有通过摄影机检测人脸和双眼作为限制条件来打开尾门的设计,但是考虑到现有车机的摄像头的安装位置其成本较高,打开方式较为繁琐,容易实现误判。还有技术是通过对人体的动作和定位进行限制,通过检测和识别特定的动作和特定的位置实现尾门的开启,这种技术只能在尾门后面实现特定动作的识别,无法实现尾门的随心开启。还有基于轮询钥匙定位实现汽车尾门自动控制的方法,基于钥匙所在位置发出的场强信息来计算钥匙,当人携带钥匙进入出发区域停留一段时间进行尾门开启的动作,离开该区域尾门会自动关闭,但是这种技术在具体的实施过程中有较大的误触发的风险。
技术实现要素:
3.针对现有技术存在的上述缺陷,本发明的目的是提供一种车辆尾门控制方法及系统,摒弃传统繁琐的尾门开闭方式,克服现有背景技术带来的误触发、识别慢、只能从后方进行识别等问题,让汽车尾门真正读懂人的意图,在需要的时候可以及时的打开和关闭,实现尾门和人的随心交互。
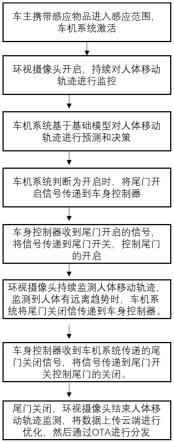
4.本发明的技术方案如下:本发明提供一种车辆电动尾门控制方法,其包含如下步骤:步骤1,响应于车主进入感应区的信号,激活车机系统,开启车载环视摄像头进行人体移动轨迹的持续监测和捕捉。
5.步骤2,车机系统进行人体移动轨迹的预测和判断,当判断为开启尾门时,将尾门开启信号传递到车身控制器。
6.步骤3,车身控制器收到尾门开启信号,将信号传递到尾门开关,控制尾门的开启。
7.步骤4,车载环视摄像头持续监测人体移动轨迹,当车机系统识别到人体移动轨迹变化时,进行预测和判断,当判断为关闭尾门,将尾门关闭信号传递到车身控制器。
8.步骤5,车身控制器收到尾门关闭信号,将信号传递到尾门开关,控制尾门的关闭。
9.步骤6,尾门关闭后,环视摄像头结束对人体移动轨迹的持续监测,车机系统将视频上传云端系统。
10.步骤7,云端系统对视频过程中车主手拿重物、车主习惯打开尾门和关闭尾门的轨迹点等数据进行模型训练和标定,通过ota的形式分发到车机系统。
11.具体地,所述步骤1,车主进入感应区的信号是指车主携带钥匙/与车机系统绑定的手机/手环/眼镜等车辆可感应的物品进入车辆感应范围内的信号。
12.2、具体地,所述步骤2中,车机系统针对环视摄像头捕捉到的人体移动轨迹,基于所述基础模型包含有预设的概率性移动轨迹,所述基础模型包含一个设定区域,该设定区
域为结合车辆感应范围区域及人体可感知区域综合设定,前期在用户靠近车辆感应范围,通过摄像头持续监测用户移动轨迹以及用户通过钥匙打开尾门的轨迹点,将这条轨迹作为概率性移动轨迹,当概率性移动轨迹的数量超过一定值时,基础模型完成初期概率性移动轨迹的收集,后期通过用户的移动轨迹与概率性移动轨迹的贴合率结合时间和/或空间维度对用户的移动轨迹进行的预测和判断。
13.当判断用户的移动轨迹与概率性移动轨迹的贴合率大于a时判断为开启,或车主在某个时间段或者某个地点有打开尾门的习惯,即使没按照基础模型的移动轨迹进行移动,此时对移动轨迹进行概率加权,当判断打开尾门的概率大于b时,也判断为开启,这里a和b均为设定值,概率加权的方式也是根据实际经验厂家自行设定。
14.所述步骤4具体是,环视摄像头持续对人体移动轨迹进行监测,车机系统根据基础模型通过预设的移动轨迹对人体移动轨迹进预测,对环视摄像头监测到的人体轨迹持续预测和判断。当车机系统识别到人体移动轨迹远离车辆,车机系统对人体移动轨迹进行概率性预测,当远离的概率大于等于c时,判断为尾门关闭,或者感应不到车主的移动轨迹时,车机系统也判断为尾门关闭,c也为设定值。
15.具体地,所述步骤7,云端系统对数据进行模型训练和标定是,由云端部署的数据模型对车机系统上传的视频通过数据处理工具进行清洗、融合和标签计算,对视频过程中车主手拿重物、车主习惯打开尾门和关闭尾门的轨迹点、车主习惯打开尾门和关闭尾门的时间等数据进行模型训练和标定。
16.本发明在另一方面,还提供一种车辆尾门控制系统,所述系统包括:车载环视摄像头:用于对人体移动轨迹进行监控。
17.车机系统:用于对环视摄像头采集到的人体移动轨迹基于基础模型进行预测和判断,判断是开启尾门还是关闭尾门,发出对应的控制信号给车身控制器;并在尾门关闭后,将采集到的人体移动轨迹数据上传到云端系统。
18.云端系统:用于对车机系统采集到的人体移动轨迹进行标定和学习,通过云端实现车机系统的ota,完成尾门开启系统千人千面的打造。
19.车身控制器:负责接受车机系统的信号,并将信号传递给尾门开关。
20.尾门开关:执行尾门开启和关闭的动作。
21.本发明还提供一种车辆,所述车辆配置有上述车辆尾门控制系统的车载环视摄像头、车机系统、车身控制器和尾门开关,用于执行以上所述的车辆尾门控制方法。
22.采用以上技术方案,本发明具有如下优点:1、本发明通过车载环视摄像头进行人体移动轨迹的预测实现尾门的控制,通过对基础模型的不断优化,不会误触发,无需任何操作,任何特定的动作即可实现尾门的控制,可解决背景中的问题。
23.2、通过云端系统对车主移动轨迹数据的基础模型进行训练和标定,并通过ota的形式分发给车端,通过车机系统根据基础模型通过预设的移动轨迹对人体移动轨迹进预测,对环视摄像头监测到的人体轨迹持续预测和判断,从而智能地控制尾门的开启和关闭,让尾门控制更加智能,可以实现尾门的智能随心,提升用户的体验感。
24.3、基于手机/手环/眼镜等识别形式,完成车主身份的专属识别,可以实现多名乘客的定制化体验,可以做到千人千面,同时后期也可以作为ota选装包,实现创收。
25.4、本发明在硬件方面是基于现有的车辆自带的环视摄像头即可实现,无需增加任何额外的成本,在现有的车上进行改造容易实现。
附图说明
26.图1:本发明的车辆尾门控制系统的示意图;图2:本发明的人体移动轨迹预测示意图;图3:本发明的车辆尾门控制的流程图。
具体实施方式
27.以下结合附图对本发明的具体实施方案做详细描述。
28.本发明的目的是提供一种随心懂我的车辆尾门控制方案,摒弃传统繁琐的尾门开闭方式,克服现有背景技术带来的误触发、识别慢、只能从后方进行识别等问题,让汽车尾门真正读懂人的意图,在需要的时候可以及时的进行尾门打开和关闭,实现尾门和人的随心交互。
29.实施例1:参见图1,本实施例是实现车辆尾门控制的系统,该系统通过车载环视摄像头对人体移动轨迹进行预测实现尾门随心开启,具体包含如下:车载环视摄像头:位于车辆前部、侧面和后部,是基于汽车现有搭载的环视摄像头,用于实现人体移动轨迹的捕捉和持续的监控。
30.车机系统:用于对车载环视摄像头采集到的人体移动轨迹进行上传到云端和本地处理,对人体移动轨迹进行预测和决策判断。
31.云端系统:负责对车机系统采集到的人体移动轨迹进行标定和学习,通过云端实现车机系统的ota,完成尾门开启系统千人千面的打造。
32.车身控制器:负责接受车机系统的信号,并将信号传递给尾门开关。
33.尾门开关:负责接收车身控制器传递过来的信号控制尾门的开启和关闭。
34.实施例2:本实施例详细说明采用以上的控制系统,基于摄像头深度学习的车辆尾门控制方法的具体步骤:1、当车主携带钥匙/与车机系统绑定的手机/手环/眼镜等车辆可感应的物品进入车辆感应范围区域内时,例如10m,车辆在接收到感应信号之后开始激活车机系统,同时开启车载环视摄像头,进行人体移动轨迹的持续监测和捕捉。
35.2、参见图3,车机系统针对车载环视摄像头捕捉到的人体移动轨迹,基于对应自带的基础模型,所述基础模型包含一个设定区域,该设定区域为结合车辆感应范围区域及人体可感知区域设定,前期在用户靠近车辆感应范围,通过摄像头持续监测用户移动轨迹以及通过钥匙打开尾门的地方,将这条轨迹作为概率性移动轨迹,当概率性移动轨迹的数量超过一定值时,完成初期概率性移动轨迹的收集,后期基础模型结合时间和空间维度对用户的移动轨迹进行的预测和判断,例如在某个时间/地点用户有打开尾门的习惯,结合当前用户的移动轨迹与概率性移动轨迹的贴合率,进行综合评估是否需要开启尾门。
36.当人体移动轨迹在基础模型设定的路线区域内移动,通过车机系统对人体移动轨
迹进行判断预测,通过用户的移动轨迹与前期的概率性移动轨迹的贴合率,当贴合率大于a时,例如a可以设定为90%,此时车机系统就判断为需要开启尾门。或者,结合车主在某个时间段或者某个地点是否有打开尾门的习惯进行综合评估,例如车主在某个时间段或者某个地点有打开尾门的习惯,即使此时没按照基础模型的移动轨迹进行移动,车机系统此时对移动轨迹进行概率加权,当评估用户需要打开尾门的概率超过b时,例如b设定为80%,此时车机系统也判断为需要开启尾门。
37.当通过以上预测判断为需开启尾门时,车机系统就将尾门开启信号传递到车身控制器。
38.3、车身控制器收到车机系统传递的尾门开启的信号,将信号传递到尾门开关,控制尾门的开启。
39.4、进一步参见图3,在尾门开启后,车载环视摄像头持续对人体移动轨迹进行监测。车机系统继续根据基础模型,该基础模型通过预设的移动轨迹对人体移动轨迹预测,对车载环视摄像头监测到的人体轨迹持续预测和判断。当车机系统识别到人体移动轨迹在远离车辆,车机系统对人体移动轨迹进行概率性预测,当远离的概率超过c值,例如c值设定为大于90%,就判断为需关闭尾门。或者当感应不到车主的移动轨迹时,车机系统也判断为需关闭尾门,于是车机系统将尾门关闭信号传递到车身控制器。
40.5、车身控制器收到车机系统传递的尾门关闭的信号,将信号传递到尾门开关,控制尾门的关闭。
41.6、参见图3,尾门关闭后,车载环视摄像头结束对人体移动轨迹的持续监测,车机系统将本次监测到的人体移动轨迹数据上传到云端。由云端部署的数据模型将车机系统上传的视频通过数据处理工具进行清洗、融合和标签计算,将视频中的数据提取为对模型有用的数据,例如对视频过程中车主手拿重物,车主习惯打开尾门和关闭尾门的轨迹点,车主习惯打开尾门和关闭尾门的时间等数据进行模型训练和标定,通过用户车机系统上传的视频对模型持续的训练和迭代得到千人千面的尾门开启和关闭数据。并且,通过ota的形式分发到车机系统,对车机系统的基础模型进行远程标定,使基础模型得到不断的优化,更加符合车主的习惯,实现尾门随心开启。
42.可见,通过以上的基于现有车载设备的控制系统,通过车载环视摄像头对人体移动轨迹预测,车机系统根据基础模型通过预设的移动轨迹对人体移动轨迹进预测,实现尾门的控制,不会误触发,无需任何操作,任何特定的动作即可实现尾门的控制;通过云端系统对车主移动轨迹数据的基础模型进行训练和标定,通过对车主行为习惯的不断学习和优化,完善行为轨迹预测模型, 对基础模型的不断优化,并通过ota的形式分发给车端,从而智能地控制尾门的开启和关闭,让尾门控制更加智能,可以实现尾门的智能随心,可以实现尾门打开方式的千人千面,提升用户的体验感。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1