一种多功能水下垃圾打捞机器人
1.本发明属于垃圾处理技术领域,尤其涉及一种多功能水下垃圾打捞机器人。
背景技术:
2.每天都有许多污染垃圾进入河流、湖泊和海洋等水域,大部分垃圾都会沉入水底对环境造成一定的影响,水底垃圾的打捞就成为一大环境问题。现如今,对于水底垃圾的打捞可以依靠全人工作业也可以是水下机器打捞。人工作业大都是水面驾驶船只打捞和人工潜水打捞,费时费力且耗财又危险;水下机器人的打捞多依赖于高程度的自动化,利用铲子或伸缩装置进行垃圾的收集,移动方式大部份依靠履带,转向须有较大的活动范围。
3.在实现本发明的过程中,发明人发现现有技术至少存在以下问题:
4.1.人为打捞一般驾驶船只使用打捞网将垃圾打捞出,只适用于水面垃圾或较浅水域,较深水域可视度低无法打捞;
5.2.人工潜水打捞费时费力且耗财,又有一定的危险系数;
6.3.现有的水下垃圾打捞机器人大多移动方式依靠履带,移动极其不便,转向须有较大的活动范围,且复杂水域水底的平整度较差,易发生侧翻且无法自主恢复正位;
7.4.现有的水下垃圾打捞机器人功能单一。
技术实现要素:
8.本发明所要解决的技术问题是提供一种能够实现水下垃圾清理的同时,通过红外摄像头观测水底情况且通过运动控制装置来实现灵活移动的多功能水下垃圾打捞机器人。
9.为了解决上述技术问题,本发明所采用的技术方案是:一种多功能水下垃圾打捞机器人,具有:
10.主体外壳;
11.下部支撑架,安装在所述主体外壳的下端;
12.上部支撑架,安装在所述主体外壳的上端;
13.底部抓夹装置,安装在所述下部支撑架上,底部抓夹装置能够抓取物体;
14.上部抓夹装置,安装在所述上部支撑架上,上部抓夹装置能够抓取物体;
15.前进装置,设置在所述主体外壳的前端,前进装置能够带动主体外壳运动;
16.升降装置,设置在所述主体外壳的两侧,升降装置能够带动主体外壳升降。
17.所述底部抓夹装置具有:
18.着陆支撑杆,安装在所述下部支撑架上;
19.液压缸,安装在所述着陆支撑杆上;
20.上连接盖和下连接盖,相互连接并与液压缸的活塞杆连接;
21.长连杆和短连杆,所述上连接盖和下连接盖的两侧设有长连杆和短连杆,所述长连杆和短连杆的第一端与上连接盖和下连接盖铰接;
22.大抓夹,所述长连杆和短连杆的第二端与大夹爪铰接;
23.夹持气缸,两端分别与两个端连杆铰接。
24.所述上部抓夹装置具有:
25.抓夹手臂,安装在所述上部支撑架上;
26.小抓夹,安装在所述夹爪手臂上;
27.小抓夹驱动机构,能够驱动所述小抓夹夹紧或松开。
28.所述小抓夹驱动机构为齿轮连杆驱动机构,所述齿轮连杆驱动机构包括齿轮、第一连杆和第二连杆,两个齿轮转动安装在抓夹手臂上并相互啮合,第一连杆第一端与齿轮固定连接,第一连杆第二端与小抓夹铰接;第二连杆两端分别与抓夹手臂和夹爪铰接;还包括驱动齿轮转动的齿轮电机。
29.所述上部抓夹装置还具有转动机构,所述转动机构包括抓夹底座,所述抓夹底座安装在上部支撑架上,所述抓夹底座上设有转动电机,还具有下底盘安装在所述转动电机的转轴上;上底盘安装在所述下底盘上,所述抓夹手臂安装在上底盘上。
30.所述前进装置具有前进驱动扇叶,所述前进驱动扇叶转动安装在主体外壳上,所述主体外壳上还设有驱动所述前进驱动扇叶的前进电机。
31.所述升降装置具有:
32.左支撑杆和右支撑杆,所述左支撑杆和右支撑杆设置在主体外壳的两侧;
33.大电机,安装在所述左支撑杆和右支撑杆的两端;
34.升降螺旋桨,安装在所述大电机的转轴上;
35.小电机,安装在所述左支撑杆和右支撑杆的中部;
36.辅助螺旋桨,安装在所述小电机的转轴上。
37.所述上部支撑架上还设有固定架,所述固定架上设有垃圾存储篮。
38.所述上部支撑架上还设有摄像头安置台和探照灯,所述摄像头安置台上设有红外摄像头。
39.上述技术方案中的一个技术方案具有如下优点或有益效果,为水下垃圾清理提供了一种多功能且更灵活移动的选择,该装置能够实现水下垃圾清理的同时通过红外摄像头观测水底情况且通过运动控制装置来实现灵活移动。解决了现有水下垃圾打捞机器人功能单一的问题,满足了其垃圾打捞的基本需求。
附图说明
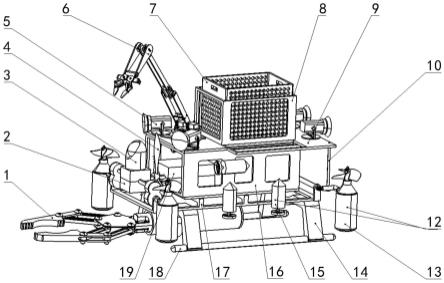
40.图1为本发明实施例中提供的多功能水下垃圾打捞机器人的结构示意图;
41.图2为图1的多功能水下垃圾打捞机器人的结构示意图;
42.图3为图1的多功能水下垃圾打捞机器人的结构示意图;
43.图4为图1的多功能水下垃圾打捞机器人的结构示意图;
44.上述图中的标记均为:1、底部抓夹装置,1-1、大抓夹,1-2、短连杆,1-3、下连接盖,1-4、上连接盖,1-5、长连杆,1-6、夹持气缸,2、摄像头安置台,3、红外摄像头,4、前进驱动扇叶,5、探照灯,6、上部抓夹装置,6-1、小抓夹,6-2、齿轮,6-3、抓夹手臂,6-4、抓夹底座,6-5、下底盘,6-6、l型支架,6-7、上底盘,7、垃圾存储篮,8、固定架,9、上部支撑架,10、左支撑杆,11、右支撑杆,12、上升装置,13、大电机,14、起落架,15、小电机,16、主体外壳,17、下部支撑架,18、着陆支撑杆,19、密封箱,20、液压缸。
具体实施方式
45.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
46.参见图1-4,一种多功能水下垃圾打捞机器人,具有:
47.主体外壳;下部支撑架,安装在主体外壳的下端;上部支撑架9,安装在主体外壳的上端。主体外壳、下部支撑架、上部支撑架9构成机器人的主体。
48.底部抓夹装置1,安装在下部支撑架上,底部抓夹装置1能够抓取物体;起到夹取底部垃圾的作用。
49.上部抓夹装置6,安装在上部支撑架9上,上部抓夹装置6能够抓取物体;起到夹取水面垃圾的作用。
50.前进装置,设置在主体外壳的前端,前进装置能够带动主体外壳运动;起到推动机器人行走的作用。
51.升降装置12,设置在主体外壳的两侧,升降装置12能够带动主体外壳升降。起到推动机器人在水中升降的作用。
52.底部抓夹装置1具有:着陆支撑杆,安装在下部支撑架上;液压缸,安装在着陆支撑杆上;上连接盖和下连接盖,相互连接并与液压缸的活塞杆连接;长连杆和短连杆,上连接盖和下连接盖的两侧设有长连杆和短连杆,长连杆和短连杆的第一端与上连接盖和下连接盖铰接;大抓夹,长连杆和短连杆的第二端与大夹爪铰接;夹持气缸,两端分别与两个端连杆铰接。底部抓夹装置1包括液压缸、大抓夹、l型长连杆、短连杆、上连接盖、下连接盖;起落架前部有一空心圆柱内置底部抓夹装置1的液压缸;液压缸通过螺栓与上连接盖和下连接盖相连接;上连接盖和下连接盖前端通过光杆螺栓与两个短连杆相连接,上连接盖和下连接盖后端通过光杆螺栓与两个l型长连杆相连接;两个l型长连杆与两个短连杆通过光杆螺栓与两个大抓夹相连接。两个l型长连杆、两个短连杆和两个大抓夹由光杆螺栓连接构成连杆机构;液压杠的活塞杆与l型长连杆相连,液压杠工作时,活塞杆往复运动进而实现底部抓夹装置1的抓夹工作;起落架下端设有凹槽,将与上述凹槽形状相适应的着陆支撑杆嵌入,两个着陆支撑杆分别位于起落架的左右两侧,起到机器着陆缓冲和支撑作用;着陆支撑杆材料为硬质橡胶,以起到更好的缓冲作用。
53.上部抓夹装置6具有:抓夹手臂,安装在上部支撑架9上;小抓夹,安装在夹爪手臂上;小抓夹驱动机构,能够驱动小抓夹夹紧或松开。小抓夹驱动机构为齿轮连杆驱动机构,齿轮连杆驱动机构包括齿轮、第一连杆和第二连杆,两个齿轮转动安装在抓夹手臂上并相互啮合,第一连杆第一端与齿轮固定连接,第一连杆第二端与小抓夹铰接;第二连杆两端分别与抓夹手臂和夹爪铰接;还包括驱动齿轮转动的齿轮电机。上部抓夹装置6包括上底盘、下底盘、l型支架、抓夹手臂、小抓夹、抓夹底座、齿轮等部分组成;前部探照灯5中后方有上部抓夹装置6与主体外壳上部前侧通过螺栓连接钳爪式上部抓夹装置6的底部;上部抓夹装置6有六个舵机来保证其工作自由度,一个舵机主体卡在有舵机相同形状孔的下底盘上,舵机输出端与上底盘相固定来控制上部抓夹装置6的左右回转摆动;上部抓夹装置6的抓夹手臂为三节,上底盘通过螺栓与l型支架紧密连接;l型支架另一侧与两个舵机相连接;与l型
支架相连接固定的两个舵机分别与抓夹手臂下端相连接,控制上部抓夹装置6的上下摆动;齿轮通过舵机来控制其啮合,进而控制上部抓夹装置6的小抓夹的抓夹工作;抓夹手臂的另外两处弯折处通过舵机连接实现抓夹手臂的弯曲。
54.上部抓夹装置6还具有转动机构,转动机构包括抓夹底座,抓夹底座安装在上部支撑架9上,抓夹底座上设有转动电机,还具有下底盘安装在转动电机的转轴上;上底盘安装在下底盘上,抓夹手臂安装在上底盘上。
55.前进装置具有前进驱动扇叶4,前进驱动扇叶4转动安装在主体外壳上,主体外壳上还设有驱动前进驱动扇叶4的前进电机。前进驱动扇叶4穿过密封箱前部杆件置于t型结构上,实现机器的前进运动;主体外壳两侧非镂空处各连接一个小电机驱动装置,实现机器的转向和辅助前进运动。
56.升降装置12具有:左支撑杆10和右支撑杆11,左支撑杆10和右支撑杆11设置在主体外壳的两侧;大电机,安装在左支撑杆10和右支撑杆11的两端;升降螺旋桨,安装在大电机的转轴上;小电机,安装在左支撑杆10和右支撑杆11的中部;辅助螺旋桨,安装在小电机的转轴上。机器下部支撑架前部在接口处通过杆件连接两个大电机驱动装置,机器下部支撑架后侧在接口处通过杆件连接两个大电机驱动装置,实现机器的上升运动;小电机驱动装置有四个,两个均布连接在机器下部支撑架左侧,两个均布连接在机器下部支撑架右侧,实现辅助机器的上升运动;大电机驱动装置内置有电机来驱动螺旋桨的运动;小电机驱动装置内置有小电机来驱动螺旋桨的运动;机器上部支撑架9左右两侧边缘设有长方形镂空,用于抬起机器;主体外壳前部和机器上部支撑架9后侧,各有两个圆孔,与探照灯5底部圆柱过盈配合实现连接固定。
57.上部支撑架9上还设有固定架8,固定架8上设有垃圾存储篮7。上部支撑架9上还设有摄像头安置台2和探照灯5,摄像头安置台2上设有红外摄像头3。垃圾储存篮固定架8底部与机器上部支撑架9上端通过螺栓连接;垃圾储存篮置于垃圾储存篮固定架8内;主体外壳为中空长方体外壳,前后相通,中间置有密封箱;密封箱内安装有水下机器的控制电路板;密封箱前端有一杆件与机器下部支撑架前侧上端连接两侧接口处杆件构成t字型结构;t字型结构上嵌有红外摄像头3安置台2;红外摄像头3安置台2为密封结构,内有电路板用于红外摄像头3的工作;红外摄像头3固定在红外摄像头3安置台2上方。
58.要使用该多功能水下垃圾打捞机器人作业,则由人为通过机器上部支撑架9左右两侧边缘设有的长方形镂空,抬起机器将其放入较深水域面中;入水后通过重力下沉到水底,在下沉期间运动控制装置相互协调控制机器平衡,运动控制装置相互协调运动使机器到目标水域进行作业;其到达目标水域起落架上的着陆支撑杆后由红外摄像头3勘测水底情况,在较深水域探照灯5的前两个探照灯5使得水域画面更清晰;在进行垃圾打捞工作时,先使得底部抓夹装置1的液压缸工作,使得活塞杆推动l型长连杆从而使短连杆和大抓夹运动夹取垃圾;目标垃圾被大抓夹夹取后,上部抓夹装置6开始工作;上部抓夹装置6开始工作时,卡在有舵机相同形状孔的下底盘上的一个舵机输出端与上底盘相固定来控制上部抓夹装置6的左右回转摆动;与l型支架相连接固定的两个舵机分别与抓夹手臂下端相连接,控制上部抓夹装置6的上下摆动;齿轮通过舵机来控制其啮合,进而控制上部抓夹装置6的小抓夹的抓夹工作;上部抓夹装置6的小抓夹夹取大抓夹上的目标垃圾,后通过抓夹手臂上的舵机控制上抓夹手臂将小抓夹上的目标垃圾背向投入垃圾储存篮中;完成后运动控制装置
控制机器运动寻找下一个目标垃圾再次进行上述垃圾打捞工作;底部抓夹装置1的存在是为了固定垃圾不受水的流动影响,若底部抓夹装置1无法稳定夹取垃圾,则由上部抓夹装置6直接抓取垃圾;若遇较大垃圾无法储存,则在打捞结束前由底部抓夹控制装置夹取垃圾上岸实现收集;机器打捞完成后运动控制装置工作使机器返回水面人工将垃圾储存篮内垃圾倒出;至此完成此机器的垃圾打捞工作。
59.有益效果1.该水下垃圾打捞机器人通过运动控制装置,可实现原地或小区域转向,使其移动更加灵活;2.该水下垃圾打捞机器人前后各有两个探照灯5,在夜晚作业方便在水面发现,且方便快速找回在可见度较低的水域因故障而无法移动的机器;3.垃圾储存篮镂空设计,且垃圾储存篮固定支架只有框架,水下无需沥水,岸上通过楼空孔沥水,方式简单快捷;4.大型垃圾可在打捞最后通过底部抓夹装置1抓夹运输至水面;5.各结构较为独立,方便故障维修或者更换零件。
60.采用上述的结构后,为水下垃圾清理提供了一种多功能且更灵活移动的选择,该装置能够实现水下垃圾清理的同时通过红外摄像头3观测水底情况且通过运动控制装置来实现灵活移动。解决了现有水下垃圾打捞机器人功能单一的问题,满足了其垃圾打捞的基本需求。
61.在本发明的描述中,需要理解的是,术语“同轴”、“底部”、“一端”、“顶部”、“中部”、“另一端”、“上”、“一侧”、“顶部”、“内”、“前部”、“中央”、“两端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
62.在本发明中,除非另有明确的规定和限定,术语“安装”、“设置”、“连接”、“固定”、“旋接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
63.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1