一种并联机器人从动臂的制作方法
1.本实用新型涉及并联机器人领域,具体涉及一种并联机器人从动臂。
背景技术:
2.在机器人中常会采用并联机器人以实现多方位的快速运动,且并联机器人相对于串联机构具有刚度大、结构稳定、承载能力强、精度高等优点,扩大了机器人的应用领域
3.其中,其从动臂采用轻质碳纤维管,其两端套设有球形关节轴承座,并通过固定销固定,通常从动臂采用空心管,其壁厚很薄,仅为1mm左右,仅仅通过固定销固定是非常不牢靠的,其与固定销的连接处容易变形松动,结构不稳定、承载能力差、易影响并联机器人的工作精度,使用寿命低。
技术实现要素:
4.本实用新型的目的是提供一种并联机器人从动臂,以解决固定销的连接处容易变形松动,结构不稳定、承载能力差、易影响并联机器人的工作精度,使用寿命低的问题。
5.为实现上述目的,本实用新型采用如下技术方案:
6.一种并联机器人从动臂,包括,支杆、弹簧组件和安装组件;
7.所述支杆的数量为两个,所述支杆的两端固定连接有连接头,所述连接头上开设有半圆形的安装槽;
8.所述弹簧组件位于两个所述支杆之间,所述弹簧组件用于拉紧两个所述支杆;所述安装组件包括第一固定座、第二固定座、第一连杆和第二连杆,所述第一固定座和所述第二固定座分别与所述支杆固定连接,所述第一连杆的一端与所述第一固定座转动连接,所述第一连杆的另一端上固定连接有转轴,所述第二连杆的一端与所述第二固定座转动连接,所述第二连杆靠近长度方向中心的位置上开设有转动孔,所述转轴穿过所述转动孔。
9.进一步地,所述弹簧组件的数量为两个,两个所述弹簧组件分别位于靠近所述支杆两端的位置。
10.进一步地,所述弹簧组件包括连接架和弹簧,所述连接架的数量为两个,两个所述连接架分别与两个所述支杆转动连接,所述弹簧的两端分别与所述连接架卡接。
11.进一步地,所述弹簧的数量为两个,两个所述弹簧分别与所述连接架靠近两端的位置卡接。
12.进一步地,所述安装组件还包括螺栓、连接线和助力杆,所述第一连杆靠近中间的位置上开设有螺纹孔,所述螺栓于所述螺纹孔内螺纹连接,所述连接线的一端与所述螺栓固定连接,所述第二连杆远离第二固定座的一端上开设有穿线孔,所述连接线穿过所述穿线孔,所述连接线与所述助力杆固定连接。
13.进一步地,所述第二连杆远离第二固定座的一端沿所述第二连杆的长度方向开设有放置孔,所述助力杆放置于所述放置孔内。
14.本实用新型的有益效果:
15.通过支杆上的连接头能够与其他部分连接,通过弹簧组件使两个支杆的距离向相互靠近的方向挤压,使得两个支杆能够与其他部分的结构连接,从而解决了固定销的连接处容易变形松动,结构不稳定、承载能力差、易影响并联机器人的工作精度,使用寿命低的问题,但是由于弹簧组件的弹力较大,在安装过程中比较繁琐,通过第一固定座、第二固定座、第一连杆和第二连杆的设置,在安装时,先安装支杆的一端,在安装另一端时,通过外力使第二连杆的自由端靠近第一连接杆,从而能够增加支杆另一端之间的距离,从而能够将支杆的两端均与其他部分连接。
附图说明
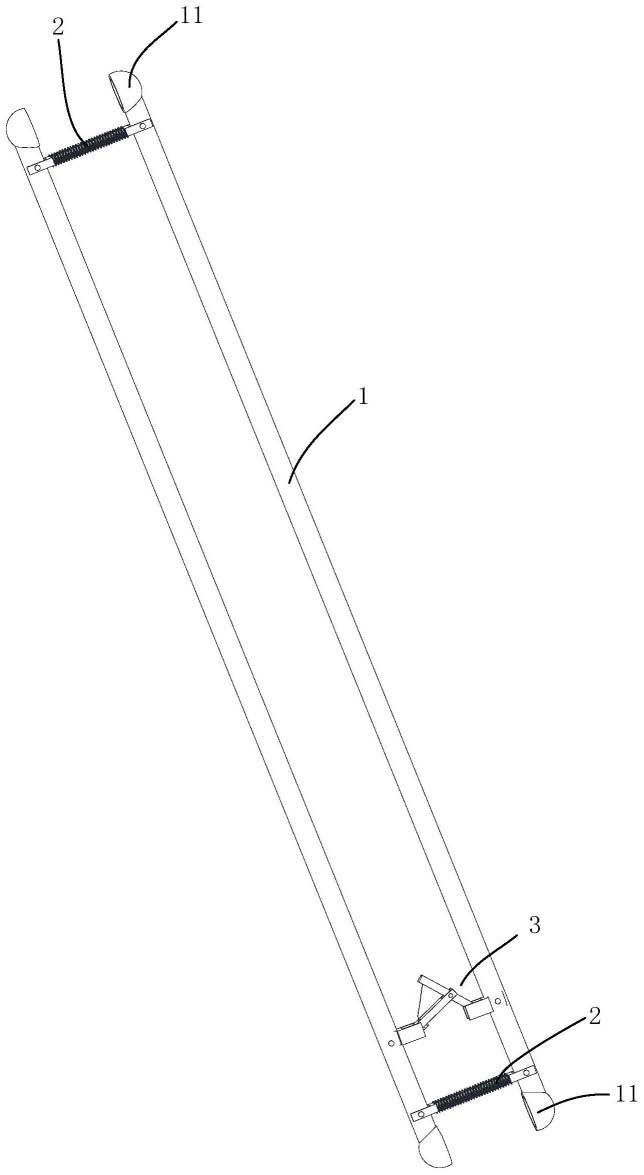
16.图1是一种并联机器人从动臂整体结构示意图;
17.图2是一种并联机器人从动臂中安装组件的结构示意图;
18.图3是一种并联机器人从动臂中弹簧组件的结构示意图。
19.图中各标记对应的名称:
20.1-支杆;11-连接头;2-弹簧组件;21-连接架;22-弹簧;3-安装组件;31-第一固定座;32-第一连杆;33-第二连杆;34-螺栓;35-连接线;36-助力杆;37-穿线孔;38-放置孔;39-第二固定座。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
22.本实用新型的实施例:
23.一种并联机器人从动臂,包括支杆1、弹簧组件2和安装组件3;支杆1的数量为两个,支杆1的两端固定连接有连接头11,连接头11上开设有半圆形的安装槽;弹簧组件2位于两个支杆1之间,弹簧组件2用于拉紧两个支杆1;安装组件3方便两个支杆1安装。通过支杆1上的连接头11能够与其他部分连接,通过弹簧组件2使两个支杆1的距离向相互靠近的方向挤压,使得两个支杆1能够与其他部分的结构连接,从而解决了固定销的连接处容易变形松动,结构不稳定、承载能力差、易影响并联机器人的工作精度,使用寿命低的问题。
24.两个支杆1安装于主动臂与夹爪之间,并且主动臂和夹爪的连接有均包括一个连接杆,连接杆的两端固定连接有连接球,安装槽扣合在连接球上,实现从动臂的连接。
25.安装组件3位于连杆靠近一端的位置上,安装组件3包括第一固定座31、第二固定座39、第一连杆32和第二连杆33,第一固定座31和第二固定座39分别与支杆1固定连接,第一连杆32的一端与第一固定座31转动连接,第一连杆32的另一端上固定连接有转轴,第二连杆33的一端与第二固定座39转动连接,第二连杆33靠近长度方向中心的位置上开设有转动孔,转轴穿过转动孔。
26.安装组件3还包括螺栓34、连接线35和助力杆36,第一连杆32靠近中间的位置上开设有螺纹孔,螺栓34于螺纹孔内螺纹连接,连接线35的一端与螺栓34固定连接,在不需要拆卸支杆1时,通过螺栓34将连接线35拆下从而不影响安装组件3的日常使用,第二连杆33远离第二固定座39的一端上开设有穿线孔37,连接线35穿过穿线孔37,连接线35与助力杆36固定连接。
27.在需要安装组件3将支杆1的两端撑起时,只需要拉动助力杆36,使穿线孔37靠近螺纹孔,通过第一连杆32和第二连杆33之间的连接关系就能够实现将两个支杆1的一端远离。第二连杆33远离第二固定座39的一端沿第二连杆33的长度方向开设有放置孔38,助力杆36放置于放置孔38内,在使用出过程中,助力杆36位于放置孔38内,并不会影响从动臂的使用。通过安装组件3使得在拆装连杆时都更加方便。
28.弹簧组件2的数量为两个,两个弹簧组件2分别位于靠近支杆1两端的位置。两个弹簧组件2能够使在安装槽扣合在连接球上时扣合得更加稳固,不容易偏离。弹簧组件2包括连接架21和弹簧22,连接架21的数量为两个,两个连接架21分别与两个支杆1转动连接,由于支杆1在运动过程中呈现的是多角度的运动,连接架21和支杆1的转动连接,使得两个支杆1之间的角度变化时,连接架21与支杆1之间的夹角也发生变化。弹簧22的两端分别与连接架21卡接。弹簧22的数量为两个,两个弹簧22分别与连接架21靠近两端的位置卡接,两个弹簧22弹力更强对支杆1拉动的力更大。
29.本实用新型不局限于上述最佳实施方式,任何人在本实用新型的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是具有与本申请相同或相近似的技术方案,均落在本实用新型的保护范围之内。
技术特征:
1.一种并联机器人从动臂,其特征在于,包括,支杆、弹簧组件和安装组件;所述支杆的数量为两个,所述支杆的两端固定连接有连接头,所述连接头上开设有半圆形的安装槽;所述弹簧组件位于两个所述支杆之间,所述弹簧组件用于拉紧两个所述支杆;所述安装组件包括第一固定座、第二固定座、第一连杆和第二连杆,所述第一固定座和所述第二固定座分别与所述支杆固定连接,所述第一连杆的一端与所述第一固定座转动连接,所述第一连杆的另一端上固定连接有转轴,所述第二连杆的一端与所述第二固定座转动连接,所述第二连杆靠近长度方向中心的位置上开设有转动孔,所述转轴穿过所述转动孔。2.根据权利要求1所述的一种并联机器人从动臂,其特征在于,所述弹簧组件的数量为两个,两个所述弹簧组件分别位于靠近所述支杆两端的位置。3.根据权利要求1所述的一种并联机器人从动臂,其特征在于,所述弹簧组件包括连接架和弹簧,所述连接架的数量为两个,两个所述连接架分别与两个所述支杆转动连接,所述弹簧的两端分别与所述连接架卡接。4.根据权利要求3所述的一种并联机器人从动臂,其特征在于,所述弹簧的数量为两个,两个所述弹簧分别与所述连接架靠近两端的位置卡接。5.根据权利要求1所述的一种并联机器人从动臂,其特征在于,所述安装组件还包括螺栓、连接线和助力杆,所述第一连杆靠近中间的位置上开设有螺纹孔,所述螺栓于所述螺纹孔内螺纹连接,所述连接线的一端与所述螺栓固定连接,所述第二连杆远离第二固定座的一端上开设有穿线孔,所述连接线穿过所述穿线孔,所述连接线与所述助力杆固定连接。6.根据权利要求5所述的一种并联机器人从动臂,其特征在于,所述第二连杆远离第二固定座的一端沿所述第二连杆的长度方向开设有放置孔,所述助力杆放置于所述放置孔内。
技术总结
本实用新型涉及一种并联机器人从动臂,包括支杆、弹簧组件和安装组件;支杆的数量为两个,支杆的两端固定连接有连接头,连接头上开设有半圆形的安装槽;弹簧组件位于两个支杆之间,弹簧组件用于拉紧两个支杆;安装组件包括第一固定座、第二固定座、第一连杆和第二连杆,第一固定座和第二固定座分别与支杆固定连接,第一连杆的一端与第一固定座转动连接,第一连杆的另一端上固定连接有转轴,第二连杆的一端与第二固定座转动连接,第二连杆靠近长度方向中心的位置上开设有转动孔,转轴穿过转动孔。通使得两个支杆能够与其他部分的结构连接,从而解决了固定销的连接处容易变形松动,结构不稳定、承载能力差的问题。承载能力差的问题。承载能力差的问题。
技术研发人员:李海廷
受保护的技术使用者:郑州欧士玛智能控制技术有限公司
技术研发日:2022.03.14
技术公布日:2022/6/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1