一种机械手机构及二极管装配装置的制作方法
1.本实用新型涉及光发射模块领域,特别是一种机械手机构及二极管装配装置。
背景技术:
2.光发射模块在生产过程中需要装配激光二极管,由于激光二极管在装配过程中会存在装配误差,装配误差会导致输出光偏离光轴,进而影响输出光功率,因此,现有技术会在装配完激光二极管后会为其通电,随后在线调整光路中的透镜和接收的光纤位置,从而在一定程度上弥补装配误差,提高输出光功率。
3.但是,调整透镜和接收光纤的弥补空间有限,所以输出光功率仍然会有一定影响,现有的光发射模块通常会在封装壳体内装配多个激光二极管,然后合束输出,如果每个激光二极管的输出光都偏离光轴,那么合束后的输出光功率就会有极大影响。
技术实现要素:
4.本实用新型实施例要解决的技术问题在于,提供一种机械手机构及二极管装配装置,以解决现有技术中激光二极管在装配过程中会存在装配误差,对输出光功率造成负面影响的问题。
5.第一方面,本实用新型实施例提供了一种机械手机构,用于固定激光二极管,机械手机构包括:持料组件,其包括第一导电持料件和第二导电持料件,所述第一导电持料件与所述第二导电持料件用于固定所述激光二极管,且所述第一导电持料件与所述激光二极管的正极或负极的其中一者相接,所述第二导电持料件与所述正极或所述负极的其中另一者相接;导电组件,其包括第一导电件和第二导电件,所述第一导电件与所述第一导电持料件连接,所述第二导电件与所述第二导电持料件连接;连接组件,所述第一导电持料件与所述第二导电持料件装设于所述连接组件上。
6.进一步地,所述第一导电持料件与所述第二导电持料件均设有通气道,两个所述通气道的一端用于连接负压发生装置,另一端用于吸附所述正极或者所述负极,以固定所述激光二极管。
7.进一步地,所述连接组件为电缸,其包括动力源以及与所述动力源连接的两个移动座,所述第一导电持料件装设于其中一个所述移动座上,所述第二导电持料件装设于另一个所述移动座上,所述动力源用于驱动两个所述移动座相对运动,以调节所述第一导电持料件与所述第二导电持料件的相对距离。
8.进一步地,所述机械手机构还包括第一绝缘片和第二绝缘片,二者分别设置于所述第一导电持料件与所述移动座之间,和所述第二导电持料件与所述移动座之间。
9.进一步地,所述第一导电件与所述第一导电持料件可拆卸式连接,所述第二导电件与所述第二导电持料件可拆卸式连接。
10.进一步地,所述机械手机构还包括第一绝缘螺钉和第二绝缘螺钉,所述第一导电件、所述第一导电持料件、所述第一绝缘片与所述连接组件四者通过所述第一绝缘螺钉连
接,所述第二导电件、所述第二导电持料件、所述第二绝缘片与所述连接组件四者通过所述第二绝缘螺钉连接。
11.进一步地,所述电缸还包括位移调节结构,其设置于所述移动座的移动路径上,以调节所述移动座的行程。
12.进一步地,所述电缸包括壳体,所述动力源连接于所述壳体,所述壳体的一侧设有滑槽,两个所述移动座滑动式设置于所述滑槽中,以使两个所述移动座能沿所述滑槽的长度方向滑动;所述位移调节结构包括螺纹通孔以及行程螺钉,所述螺纹通孔沿所述滑槽的长度方向设置于所述滑槽的槽壁上,所述行程螺钉通过所述螺纹通孔伸入所述滑槽中。
13.进一步地,所述行程螺钉的尾部伸入所述滑槽中。
14.第二方面,本实用新型实施例还提供了一种二极管装配装置,包括:机械手机构,其为上述第一方面所展示的机械手机构;位移调整机构,所述机械手机构的连接组件装设于所述位移调整机构上,所述位移调整机构用于调整所述连接组件的位置与角度。
15.与现有技术相比,本实用新型实施例提供的机械手机构及二极管装配装置的有益效果在于:
16.本实用新型实施例提供的机械手机构包括持料组件、导电组件和连接组件,持料组件包括第一导电持料件和第二导电持料件,第一导电持料件与第二导电持料件用于固定激光二极管,且第一导电持料件与激光二极管的正极或负极的其中一者相接,第二导电持料件与正极或负极的其中另一者相接,导电组件包括第一导电件和第二导电件,第一导电件与第一导电持料件连接,第二导电件与第二导电持料件连接,由此第一导电件可以通过第一导电持料件与激光二极管的正极或负极的其中一者相接,第二导电持料件可以通过第二导电持料件与激光二极管的正极或负极的其中另一者相接,使第一导电件与第二导电件能配合为激光二极管供电,使激光二极管在完成装配前就输出激光,外界调整机构通过与连接组件连接,从而带动机械手机构,以调整激光二极管的位置与角度,调整过程中检测到输出光功率达到最大值就可以固定激光二极管,有效地避免因激光二极管的装配误差对输出光功率带来的负面影响,提高了输出光功率。
附图说明
17.下面将结合附图及实施例对本实用新型的具体实施方式作进一步详细的说明,附图中:
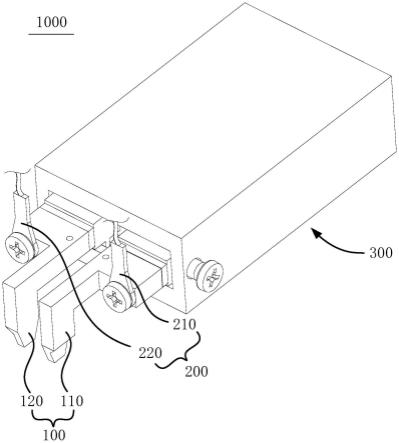
18.图1是本实用新型实施例提供的机械手机构的立体结构示意图;
19.图2是图1所示机械手机构吸附着激光二极管以及连接着负压发生装置的立体结构示意图;
20.图3是图1所示机械手机构的爆炸视图;
21.图4是本实用新型实施例提供的第一导电持料件的立体结构示意图;
22.图5是图4所示第一导电持料件的另一角度的立体结构示意图。
23.图中各附图标记为:
24.1000、机械手机构;
25.100、持料组件;110、第一导电持料件;111、通气道;120、第二导电持料件;
26.200、导电组件;210、第一导电件;220、第二导电件;
27.300、连接组件;310、电缸;311、移动座;312、位移调节结构;3121、螺纹通孔;3122、行程螺钉;31221、尾部;31222、头部;313、壳体;3131、滑槽;
28.410、第一绝缘片;420、第二绝缘片;430、第一绝缘螺钉;440、第二绝缘螺钉;
29.2000、激光二极管。
具体实施方式
30.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。现结合附图,对本实用新型的较佳实施例作详细说明。
31.本实用新型提实施例供了一种机械手机构1000,如图1所示,机械手机构1000包括持料组件100、导电组件200以及连接组件300。持料组件100包括第一导电持料件110和第二导电持料件120,第一导电持料件110与第二导电持料件120用于固定激光二极管2000,且第一导电持料件110与激光二极管2000的正极或负极的其中一者相接,第二导电持料件120与正极或负极的其中另一者相接。导电组件200包括第一导电件210和第二导电件220,第一导电件210与第一导电持料件110连接,第二导电件220与第二导电持料件120连接,由此第一导电件210可以通过第一导电持料件110与激光二极管2000的正极或负极的其中一者相接,第二导电持料件120可以通过第二导电持料件120与激光二极管2000的正极或负极的其中另一者相接,使第一导电件210与第二导电件220能配合为激光二极管2000供电。连接组件300用于与位移调整机构连接,第一导电持料件110与第二导电持料件120装设于连接组件300上,这样位移调整机构就能通过带动连接组件300,从而带动第一导电持料件110和第二导电持料件120,进而带动激光二极管2000,以调整激光二极管2000的位置与角度。
32.通过实施本实施例,第一导电持料件110与第二导电持料件120在共同配合固定激光二极管2000的同时,第一导电持料件110还会与激光二极管2000的正极或负极的其中一者相接,第二导电持料件120还会与激光二极管2000的正极或负极的其中另一者相接,由此,第一导电件210连接在第一导电持料件110上时,就能通过第一导电持料件110与激光二极管2000的正极或负极的其中一者导通,第二导电件220连接在第二导电持料件120上时,就能通过第二导电持料件120与激光二极管2000的正极或负极的其中另一者导通,这就使得第一导电件210与第二导电件220能共同配合为激光二极管2000供电,使激光二极管2000在完成装配前就输出激光,位移调整机构通过带动连接组件300从而调整激光二极管2000的位置与角度,调整过程中检测到输出光功率达到最大值就可以固定激光二极管2000,有效地避免因激光二极管2000的装配误差对输出光功率带来的负面影响,提高了输出光功率。特别是对于装配有多个激光二极管2000的光发射模块,输出光功率的提升尤为明显。
33.在具体实施例中,第一导电持料件110与第二导电持料件120均设有通气道111,两个通气道111的一端用于连接负压发生装置,另一端用于吸附正极或者负极,以固定激光二极管2000。
34.其中,第一导电持料件110与第二导电持料件120的材料有许多选择,只要能够导电即可,本领域技术人员可以对此进行适应性选择,本实施例在此不做限制。
35.在具体实施例中,第一导电持料件110与第二导电持料件120由钨铜、铝等导热效果较好的金属制成,这样有利于激光二极管2000的散热。
36.在一实施例中,连接组件300为电缸310,电缸310包括动力源以及与动力源连接的
两个移动座311,第一导电持料件110装设于其中一个移动座311上,第二导电持料件120装设于另一个移动座311上,动力源用于驱动两个移动座311相对运动,以调节第一导电持料件110与第二导电持料件120的相对距离。
37.具体地,电缸310性能稳定,运动线性度好,利用电缸310调节第一导电持料件110与第二导电持料件120的相对距离效果比较好,本实施例的持料组件100可以适配不同尺寸的激光二极管2000,增加了机械手机构1000的通用性。
38.其中,第一导电持料件110与第二导电持料件120的具体行程有许多调节方式,可以采用软件控制,也可以采用结构控制。以下列举采用结构控制的具体实施方式。
39.在采用结构控制第一导电持料件110与第二导电持料件120的具体行程的实施例中,电缸310包括位移调节结构312,其设置于移动座311的移动路径上,这样移动座311位移至与位移调节结构312结构相接触时,移动座311就会受到位移调节结构312的阻挡,无法再行进,由此可以控制移动座311的行程。
40.在具体实施例中,电缸310包括壳体313,动力源连接于壳体313,壳体313的一侧设有滑槽3131,两个移动座311滑动式设置于滑槽3131中,以使两个移动座311能沿滑槽3131的长度方向滑动;位移调节结构312包括螺纹通孔3121以及行程螺钉3122,螺纹通孔3121沿滑槽3131的长度方向(图-中的x方向)设置于滑槽3131的槽壁上,行程螺钉3122通过螺纹通孔3121伸入滑槽3131中。
41.具体地,电缸310在初始状态时,两个移动座311居中,开启后在动力源的带动下,两个移动座311互相远离,直至移动座311触碰到行程螺钉3122后,移动座311就会停下。如果负极与正极之间的距离比较远,就可以通过旋转行程螺钉3122,使其朝远离滑槽3131的方向移动,从而增加移动座311的行程。如果负极与正极之间的距离比较近,就可以通过旋转行程螺钉3122,使其深入滑槽3131,从而减小移动座311的行程。
42.需要说明的是,驱动源如果是同步驱动两个移动座311的话,那么只需要在滑槽3131的一侧设置螺纹通孔3121与行程螺钉3122即可,因为一个移动座311受阻另一个移动座311也无法继续移动。反之,则要在滑槽3131的两侧均设置螺纹通孔3121与行程螺钉3122。
43.在具体实施例中,行程螺钉3122的尾部31221伸入滑槽3131中。
44.需要说明的是,行程螺钉3122不管头部31222伸入滑槽3131中还是尾部31221伸入滑槽3131中,都可以通过旋转行程螺钉3122而改变行程螺钉3122的位置,从而调节移动座311的行程。本实施例之所以将行程螺钉3122的尾部31221伸入滑槽3131中,其原因在于行程螺钉3122一般需要通过其头部31222去进行旋转调节,为了能更方便调节,头部31222最好裸露出来,这就要求伸入滑槽3131中的是行程螺钉3122的尾部31221。
45.在一实施例中,机械手机构1000还包括第一绝缘片410和第二绝缘片420,二者分别设置于第一导电持料件110与移动座311之间,和第二导电持料件120与移动座311之间。
46.通过实施本实施例,可以避免第一导电持料件110和第二导电持料件120与电缸310导通,有效地避免了在给激光二极管2000供电时发生短路的情况出现。
47.在具体实施例中,第一导电件210与第一导电持料件110可拆卸式连接,第二导电件220与第二导电持料件120可拆卸式连接,这样可以方便维修、清洁、替换零部件。
48.在具体实施例中,机械手机构1000还包括第一绝缘螺钉430和第二绝缘螺钉440,
第一导电件210、第一导电持料件110、第一绝缘片410与连接组件300四者通过第一绝缘螺钉430连接,第二导电件220、第二导电持料件120、第二绝缘片420与连接组件300四者通过第二绝缘螺钉440连接。由此,可以对各个部件进行维修、清洁以及替换,用户体验较好,且螺钉的连接方式十分简单且可靠,拆装也比较便捷。
49.本实用新型还提供了一种二极管装配装置,如图1所示,二极管装配装置包括机械手机构1000和位移调整机构。机械手机构1000为上述实施例所展示的机械手机构1000,位移调整机构与连接组件300连接,以通过调整连接组件300的位置与角度,从而调整激光二极管2000的位置与角度。
50.利用本实施例提供的二极管装配装置对二极管进行装配,可以使激光二极管2000在完成装配前就输出激光,位移调整机构在调整激光二极管2000的位置与角度的过程中,检测到输出光功率达到最大值就可以固定激光二极管2000,有效地避免因激光二极管2000的装配误差对输出光功率带来的负面影响,提高了输出光功率。特别是对于装配有多个激光二极管2000的光发射模块,输出光功率的提升尤为明显。
51.应当理解的是,以上实施例仅用以说明本实用新型的技术方案,而非对其限制,对本领域技术人员来说,可以对上述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而所有这些修改和替换,都应属于本实用新型所附权利要的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1