机械手模块的制作方法
1.本实用新型属于医疗设备技术领域,尤其是涉及一种用于全自动化学发光分析仪的机械手模块。
背景技术:
2.市场上的主流化学发光产品需要采用血清或血浆作为检测样本,不能支持对全血样本的直接、自动化检测,且首样报告时间长,总体诊断时间也较长,很难满足检测周转时间的要求,总体等待时间较长,这都会加剧患者的痛苦,并容易引发家属或患者自身的抵触情绪,不利于后续患者的治疗。
3.在中国专利文献cn111735978a中,公开了一种全自动化学发光免疫分析仪,包括有底座,在所述底座上集成设置有相互独立的反应杯进载模块、机械臂进样模块、孵育模块、机械手与中转模块、磁分离清洗模块和检测模块:其中,反应杯进载模块,用于将反应杯运载至预定位置;所述机械手与中转模块将反应杯夹取到孵育模块中,对反应杯进行孵育,进行恒温反应;位于所述孵育模块中的反应杯被夹取至磁分离清洗模块进行磁吸附清洗,清洗后的反应杯被所述机械手与中转模块夹取至所述检测模块进行检测。
4.上述技术方案中公开的机械手与中转模块,其机械手动作组件在夹取反应杯时动作效率不是很理想,导致设备用户体验感差,有必要进行改进。
技术实现要素:
5.本实用新型要解决的技术问题是提供一种机械手模块,动作响应快速,效率高,节约了反应杯在全自动化学发光分析仪中各个模块之间转移的时间。
6.为解决上述技术问题,本实用新型采用的技术方案是,该机械手模块包括有机械手装置,用于转移反应杯;所述机械手装置包括有夹爪组件,所述夹爪组件包括有夹爪,所述夹爪由夹爪臂一和夹爪臂二组成;所述夹爪组件还包括有夹爪电机,当所述夹爪电机驱动推块向下运动,所述夹爪臂一和所述夹爪臂二相互远离,所述夹爪打开,当所述夹爪电机驱动推块向上运动,所述夹爪臂一和所述夹爪臂二相互靠近,所述夹爪合拢,夹取反应杯。
7.机械手装置对反应杯的夹取与放开动作依靠夹爪组件进行,夹爪组件利用推块向上或下运动进行夹爪的合拢或放开,进行反应杯的夹取,动作响应快速,效率高,节约了反应杯在全自动化学发光分析仪中各个模块之间转移的时间。
8.优选的,所述夹爪臂一通过夹爪臂连接件一与夹爪滑块一连接,所述夹爪臂二通过夹爪臂连接件二与夹爪滑块二连接,所述夹爪滑块一和所述夹爪臂二均连接在夹爪滑轨上;所述夹爪臂连接件一设置有挡轮一,所述挡轮一与挡轮块一固定连接,所述挡轮块一内设置有夹爪臂弹簧一;所述夹爪臂连接件二上设置有挡轮二,所述挡轮二与挡轮块二固定连接,所述挡轮块二内设置有夹爪臂弹簧二。
9.推块向下运动,推动挡轮(挡轮一、挡轮二),挡轮与挡轮块固定连接,挡轮块与夹爪滑块连接,沿着夹爪滑轨运动,带动挡轮运动,压缩设置在挡轮块内的夹爪臂弹簧;夹爪
臂与夹爪滑块下部连接,夹爪臂打开,反之,推块向上运动,在夹爪臂弹簧作用下,夹爪臂合起,夹取反应杯。
10.优选的,在所述夹爪臂连接件一上还设置有夹爪挡片一,在所述夹爪臂连接件二上还设置有夹爪挡片二,相应的,所述夹爪挡片一配装有夹爪光耦一,所述夹爪挡片二配装有夹爪光耦二。
11.夹爪挡片与夹爪光耦配合,对夹爪臂在夹爪滑轨的移动进行限位。
12.优选的,所述夹爪组件具有夹爪安装支架,所述夹爪电机位于所述夹爪安装支架上;所述夹爪臂弹簧一的其中一端与所述夹爪安装支架的内壁连接,所述夹爪臂弹簧二的其中一端与所述夹爪安装支架的内壁连接。
13.夹爪臂弹簧的一端与夹爪安装支架的内壁连接,便于挡轮块对夹爪臂弹簧进行压缩以及夹爪臂弹簧的弹性恢复。
14.优选的,所述机械手装置还包括有夹爪组件上下运动组件和夹爪组件左右运动组件,其中,所述夹爪组件上下运动组件用于驱动所述夹爪组件进行上下运动,所述夹爪组件左右运动组件用于驱动所述夹爪组件进行左右运动。
15.夹爪组件上下、左右均可运动,便于夹爪全方位移动进行夹爪动作。
16.优选的,所述夹爪组件上下运动组件包括有夹爪组件上下运动电机,所述夹爪组件上下运动电机连接有夹爪组件上下运动电机主动轮,所述夹爪组件上下运动电机主动轮通过夹爪组件上下运动电机皮带带动夹爪组件上下运动电机从动轮转动,所述夹爪组件上下运动电机皮带与夹爪组件上下运动滑块连接,所述夹爪组件上下运动滑块与夹爪组件上下运动滑轨连接。
17.优选的,所述夹爪组件上下运动滑块上设置有夹爪组件上下运动挡片,相应的,所述夹爪组件上下运动挡片配装有夹爪组件上下运动光耦;所述夹爪组件上下运动组件安装在夹爪组件上下运动组件安装板上。
18.优选的,所述夹爪组件左右运动组件包括有夹爪组件左右运动电机,所述夹爪组件左右运动电机连接有夹爪组件左右运动电机主动轮,所述夹爪组件左右运动电机主动轮通过夹爪组件左右运动电机皮带带动夹爪组件左右运动电机从动轮转动,所述夹爪组件左右运动电机皮带通过夹爪组件左右运动电机皮带连接件与夹爪组件左右运动滑块连接,所述夹爪组件左右运动滑块与夹爪组件左右运动滑轨连接;所述夹爪组件左右运动电机皮带连接件还与所述夹爪组件上下运动组件安装板连接。
19.优选的,所述机械手模块中的机械手装置共有三组,分别是机械手装置一、机械手装置二和机械手装置三。
20.不同编号的机械手装置对于配合不同的模块进行操作,其中,机械手装置一用于将清洗后的反应杯夹取到检测模块中,加检测液,检测结束后再通过机械手装置一将反应杯夹取到废弃通道中;机械手装置二用于将温育与反应模块中的反应杯夹取到摇匀模块中,摇匀样本与反应试剂后,反应杯被夹取回到温育与反应模块中;机械手装置三用于将温育与反应模块中反应后的反应杯夹取到磁分离清洗模块中,对反应杯进行磁分离清洗,加入检测液摇匀,再通过机械手装置三将反应杯夹取到温育与反应模块中,待检测;通过不同的机械手装置进行分析仪各模块中的反应杯移转,效率高,检测时间短,自动化程度高。
附图说明
21.下面结合附图和本实用新型的实施方式进一步详细说明:
22.图1是本实用新型的全自动化学发光免疫分析仪的整体立体结构示意图一;
23.图2是本实用新型的全自动化学发光免疫分析仪的整体立体结构示意图二;
24.图3是本实用新型的全自动化学发光免疫分析仪的整体俯视结构示意图;
25.图4是功能主体模块的立体结构示意图;
26.图5是功能主体模块的俯视结构示意图;
27.图6.1是机械手模块中机械手装置的正面结构示意图;
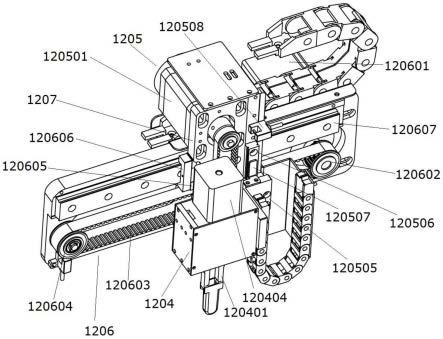
28.图6.2是机械手装置的立体结构示意图一;
29.图6.3是机械手装置的立体结构示意图二;
30.图6.4是机械手装置的夹爪组件后视立体图;
31.图6.5是机械手装置的夹爪组件中夹爪打开状态结构示意图;
32.图6.6是机械手装置的夹爪组件中夹爪闭合状态结构示意图;
33.其中:1-底座;2-功能主体模块;3-取样针模块;4-反应杯加载模块;5-试剂盘模块;6-样本管理模块,601-样本加载与卸载组件,602-样本传输组件,603-样本采样运载组件,604-样本架;7-摇匀模块;8-温育与反应模块;9-磁分离清洗模块;10-检测模块;11-稀释模块;12-机械手模块,1201、1202、1203-机械手装置,1204-夹爪组件,120401-夹爪,120402-夹爪臂一,120403-夹爪臂二,120404-夹爪电机,120405-推块,120406-夹爪臂连接件一,120407-夹爪滑块一,120408-夹爪臂连接件二,120409-夹爪滑块二,1204010-夹爪滑轨,1204011-挡轮一,1204012-挡轮块一,1204013-夹爪臂弹簧一,1204014-挡轮二,1204015-挡轮块二,1204016-夹爪臂弹簧二,1204017-夹爪挡片一,1204018-夹爪挡片二,1204019-夹爪光耦一,1204020-夹爪光耦二,1204021-夹爪安装支架,1205-夹爪组件上下运动组件,120501-夹爪组件上下运动电机,120502-夹爪组件上下运动电机主动轮,120503-夹爪组件上下运动电机皮带,120504-夹爪组件上下运动电机从动轮,120505-夹爪组件上下运动滑块,120506-夹爪组件上下运动滑轨,120507-夹爪组件上下运动挡片,120508-夹爪组件上下运动光耦,1206-夹爪组件左右运动组件,120601-夹爪组件左右运动电机,120602-夹爪组件左右运动电机主动轮,120603-夹爪组件左右运动电机皮带,120604-夹爪组件左右运动电机从动轮,120605-夹爪组件左右运动电机皮带连接件,120606-夹爪组件左右运动滑块,120607-夹爪组件左右运动滑轨,1207-夹爪组件上下运动组件安装板;13-反应杯。
具体实施方式
34.为了加深对本实用新型的理解,下面将结合实施例对本实用新型做进一步详细描述,该实施例仅用于解释本实用新型,并不对本实用新型的保护范围构成限定。
35.如图6.1-图6.6所示,机械手模块12中的三组机械手装置,分别是机械手装置一1201、机械手装置二1202和机械手装置三1203(本实施例的三组机械手装置结构相同,仅是在底座1上的安装位置不同),均包括有夹爪组件1204,夹爪组件1204包括有夹爪120401,夹爪120401由夹爪臂一120402和夹爪臂二120403组成;夹爪组件1204还包括有夹爪电机120404,当夹爪电机120404驱动推块120405向下运动,夹爪臂一120402和夹爪臂二120403
相互远离,夹爪120401打开,当夹爪电机120404驱动推块120405向上运动,夹爪臂一120402和夹爪臂二120403相互靠近,夹爪120401合拢,夹取反应杯13。
36.夹爪臂一120402通过夹爪臂连接件一120406与夹爪滑块一120407连接,夹爪臂二120403通过夹爪臂连接件二120408与夹爪滑块二120409连接,夹爪滑块一120407和夹爪臂二120403均连接在夹爪滑轨1204010上;夹爪臂连接件一120406设置有挡轮一1204011,挡轮一1204011与挡轮块一1204012固定连接,挡轮块一1204012内设置有夹爪臂弹簧一1204013;夹爪臂连接件二120408上设置有挡轮二1204014,挡轮二1204014与挡轮块二1204015固定连接,挡轮块二1204015内设置有夹爪臂弹簧二1204016;其中的挡轮具体为外螺纹型轴承。
37.在夹爪臂连接件一120406上还设置有夹爪挡片一1204017,在夹爪臂连接件二120408上还设置有夹爪挡片二1204018,相应的,夹爪挡片一1204017配装有夹爪光耦一1204019,夹爪挡片二1204018配装有夹爪光耦二1204020。
38.夹爪组件1204具有夹爪安装支架1204021,夹爪电机120404位于夹爪安装支架1204021上;夹爪臂弹簧一1204013的其中一端与夹爪安装支架1204021的内壁连接,夹爪臂弹簧二1204016的其中一端与夹爪安装支架1204021的内壁连接。
39.机械手装置还包括有夹爪组件上下运动组件1205和夹爪组件左右运动组件1206,其中,夹爪组件上下运动组件1205用于驱动夹爪组件1204进行上下运动,夹爪组件左右运动组件1206用于驱动夹爪组件1204进行左右运动。
40.夹爪组件上下运动组件1205包括有夹爪组件上下运动电机120501,夹爪组件上下运动电机120501连接有夹爪组件上下运动电机主动轮120502,夹爪组件上下运动电机主动轮120502通过夹爪组件上下运动电机皮带120503带动夹爪组件上下运动电机从动轮120504转动,夹爪组件上下运动电机皮带120503与夹爪组件上下运动滑块120505连接,夹爪组件上下运动滑块120505与夹爪组件上下运动滑轨120506连接,滑块、滑轨配合使得夹爪组件1204实现上下运动。
41.夹爪组件上下运动滑块120505上设置有夹爪组件上下运动挡片120507,相应的,夹爪组件上下运动挡片120507配装有夹爪组件上下运动光耦120508,挡片、光耦配合,限制夹爪组件1204上下运动的幅度;夹爪组件上下运动组件1205安装在夹爪组件上下运动组件安装板1207上。
42.夹爪组件左右运动组件1206包括有夹爪组件左右运动电机120601,夹爪组件左右运动电机120601连接有夹爪组件左右运动电机主动轮120602,夹爪组件左右运动电机主动轮120602通过夹爪组件左右运动电机皮带120603带动夹爪组件左右运动电机从动轮120604转动,夹爪组件左右运动电机皮带120603通过夹爪组件左右运动电机皮带连接件120605与夹爪组件左右运动滑块120606连接,夹爪组件左右运动滑块120606与夹爪组件左右运动滑轨120607连接,滑块、滑轨配合使得夹爪组件1204实现左右运动;夹爪组件左右运动电机皮带连接件120605还与夹爪组件上下运动组件安装板1207连接。
43.本实施例的机械手模块12应用在全自动化学发光免疫分析仪中,如图1-图5所示,全自动化学发光免疫分析仪包括有设置在底座1上的功能主体模块2,功能主体模块2包括有取样针模块3、反应杯加载模块4、试剂盘模块5、稀释模块11、摇匀模块7、温育与反应模块8、磁分离清洗模块9和检测模块10,还包括有与功能主体模块2相互独立的样本管理模块6,
样本管理模块6包括有样本加载与卸载组件601、样本传输组件602和样本采样运载组件603,其中,样本加载与卸载组件601用于加载与卸载样本架604,样本传输组件602用于将样本架604在样本加载与卸载组件601和样本采样运载组件603之间周转;取样针模块3用于将位于样本采样运载组件603位置处的样本加至温育与反应模块8中。
44.如图3所示,样本管理模块6呈l型半包围底座1相邻设置,样本采样运载组件603与取样针模块3相邻设置;反应杯加载模块4、试剂盘模块5、摇匀模块7、磁分离清洗模块9和检测模块10均围绕温育与反应模块8布置,其中,稀释模块11设置在取样针模块3的侧面,磁分离清洗模块9和检测模块10相邻设置;功能主体模块2中的机械手模块12,机械手模块12中的机械手装置1201、1202、1203(本实施例设置有三组机械手装置,本领域技术人员根据仪器的需要可增可减)用于转移位于反应杯加载模块4、摇匀模块7、磁分离清洗模块9和检测模块10中的反应杯13。
45.其中,通过机械手装置一1201将位于反应杯加载模块4中的反应杯夹取到温育与反应模块8中;机械手装置二1202用于将温育与反应模块8中的反应杯夹取到摇匀模块7中,再由机械手装置二1202将摇匀模块7中摇匀后的反应杯夹取到温育与反应模块8中;机械手装置三1203将温育与反应模块8中反应完毕的反应杯夹取到磁分离清洗模块9,磁分离清洗模块9处理后,再由机械手装置三1203将反应杯夹取到温育与反应模块8中,待机械手装置一1201夹取到检测模块10。
46.以上显示和描述了本实用新型的基本原理、主要特征及优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,例如在模块中的运动组件结构等做一些其它微略的调整,采用滑块、滑轨配合或者采用齿轮、齿条配合进行运动,限制、监测或监控运动距离则采用挡片、光耦配合进行,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1