一种线路巡检机器人安装工装的制作方法
1.本实用新型属于线路巡检机器人领域,具体涉及一种线路巡检机器人安装工装。
背景技术:
2.铁路线路设备是铁路运输业的基础设备,它常年裸露在大自然中,经受着风雨冻融和列车荷载的作用,轨道几何尺寸不断变化,路基及道床不断产生变形,钢轨、联结零件及轨枕不断磨损,而使线路设备技术状态不断地发生变化,因此,工务部门为了保证运输安全的重要的基础性工作,需要定期对轨道上的数据进行检测。
3.由于现有的人工测量轨道数据工作量大,存在测量误差和测量尺读数误差的缺陷,并且现有的人工判断道床和隧道限界范围内的异物时容易出现少检漏检的情况,因此提出一种基于cdd相机和线扫激光相机,结合机器人自动控制方法的线路巡检机器人来代替人工对轨道进行检查,由于该机器人整体重量较重约100kg,两个工作人员搬运较为麻烦,四个人一起搬运又造成人力资源浪费,并且由于现场轨道有可能有高低落差,或者局部的导轨倾斜角度不一样,机器人在拼接安装时会出现每次都不一样的安装误差,导致机器人的传感器设置的初始值失效,或者提高控制算法的难度,因此针对所申请的机器人同时提供一种安装工装来解决上述缺陷。
技术实现要素:
4.针对现有技术的以上缺陷或改进需求中的一种或者多种,本实用新型提供了一种线路巡检机器人安装工装,具有便于巡检机器人的安装与运输、安装运行更稳定、减少机器人读数误差值、测量更精准的优点。
5.为实现上述目的,本实用新型提供一种线路巡检机器人安装工装,包括一检测机器人本体、一快速拆装机构、四安装工装以及两钢轨;其中
6.所述检测机器人本体由一检测模块、一驱动模块、一从动模块以及一控制模块构成,所述检测模块用于对轨道线路上的影像数据进行扫描采集,所述驱动模块用于对检测机器人本体进行行进驱动,所述从动模块用于辅助所述驱动模块行进,所述控制模块用于对检测机器人本体内的模块进行整体的电信号控制;
7.所述检测机器人本体与两所述安装工装可拆卸的连接,所述安装工装安装在两所述钢轨上。
8.作为本实用新型的进一步改进,所述检测模块包括一cdd相机以及一线扫激光相机,所述cdd相机用于将轨道上的图像数据转换为电信号并通过检测模块进行收集传回,所述驱动模块用于检测轨道廓形等数据,所述检测模块、驱动模块与所述控制模块均电连接。
9.作为本实用新型的进一步改进,所述驱动模块包括四个行走轮,每个所述行走轮均卡合安装在其中一个所述安装工装上,每个所述行走轮的两侧还设有两辅助轮用于辅助行进。
10.作为本实用新型的进一步改进,所述快速拆装机构包括两连接杆以及若干锁定螺
栓,所述连接杆的两端通过若干连接杆将所述驱动模块、所述从动模块进行连接。
11.作为本实用新型的进一步改进,所述安装工装包括一定位座,所述定位座卡合设于所述钢轨上,每个所述定位座上均开设有一定位孔,相邻一侧所述钢轨上设有两安装工装且两安装工装之间连接设有一定位座连接杆,所述定位座连接杆的两端分别穿过相邻一端的定位孔内,每个所述定位座的上端面均设有一定位座圆弧槽供所述行走轮卡合安装。
12.总体而言,通过本实用新型所构思的以上技术方案与现有技术相比,具有的有益效果包括:
13.1.本实用新型的线路巡检机器人安装工装,通过设置的检测机器人本体内的检测模块、控制模块可对轨道上的线路数据进行实时、精准的电子化扫描采集,避免了复杂的人工定位巡检,通过设置的检测模块的检测以及驱动模块的行进,使得检测机器人本体可对钢轨整段的进行检测,数字化的检测不仅更加精准,同时避免了人工的漏检。
14.2.本实用新型的线路巡检机器人安装工装,通过将检测机器人本体进行拆分成模块化组装的形态,并通过设置的快速拆装机构、安装工装对检测机器人本体上的检测模块、驱动模块、从动模块、控制模块分别进行装配连接,使得在使用者对轨道上的线路巡检机器人进行装配运输时,可以单独的对某一个模块进行搬运以及拼装,进而减少了单次的搬运、拼装重量,在对机器人进行装配时,便可快速的对检测机器人本体进行装配并使用,减轻了使用者的劳力负担.
15.3.本实用新型的线路巡检机器人安装工装,通过将检测机器人本体整体设置在安装工装上,使得即使检测机器人本体遇到不同规格的轨道,依旧可以保证检测机器人本体在拼装完成后,cdd相机、线扫激光相机内的传感器抖动误差值在允许范围内,进而实现了检测机器人本体的精准数据的采集任务。
附图说明
16.图1为本实用新型检测模块、从动模块装配结构示意图;
17.图2为本实用新型驱动模块、从动模块装配结构示意图;
18.图3为本实用新型控制模块装配结构示意图;
19.图4为本实用新型快速拆装模块、钢轨装配结构示意图;
20.图5为本实用新型整体侧视结构示意图;
21.图6为本实用新型检测机器人在辅助轮作用下倾斜以及平衡状态结构示意图;
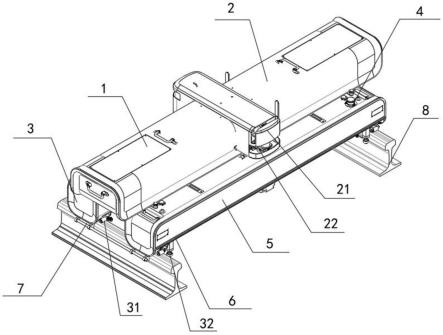
22.图7为本实用新型检测机器人整体装配结构示意图;
23.图8为本实用新型安装工装在钢轨上的装配结构示意图;
24.图9为本实用新型安装工装拆分结构示意图。
25.在所有附图中,同样的附图标记表示相同的技术特征,具体为:1、检测机器人本体;2、检测模块;21、cdd相机;22、线扫激光相机;3、驱动模块;31、行走轮;32、辅助轮;4、从动模块;5、控制模块;6、快速拆装机构;61、连接杆;62、锁定螺栓;7、安装工装;71、定位座;711、定位孔;72、定位座连接杆;73、定位座圆弧槽;8、钢轨。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行
清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.实施例
28.由图1-9给出,一种线路巡检机器人安装工装,包括一检测机器人本体1、一快速拆装机构6、四安装工装7以及两钢轨8;其中
29.检测机器人本体1由一检测模块2、一驱动模块3、一从动模块4以及一控制模块5构成,检测模块2用于对轨道线路上的影像数据进行扫描采集,驱动模块3用于对检测机器人本体1进行行进驱动,从动模块4用于辅助驱动模块3行进,控制模块5用于对检测机器人本体1内的模块进行整体的电信号控制;
30.检测机器人本体1与两安装工装7可拆卸的连接,安装工装7安装在两钢轨8上。
31.本实施例中,通过设置的检测机器人本体1内的检测模块2、控制模块5可对轨道上的线路数据进行实时、精准的电子化扫描采集,避免了复杂的人工定位巡检,通过设置的检测模块2的检测以及驱动模块3的行进,使得检测机器人本体1可对钢轨8整段的进行检测,数字化的检测不仅更加精准,同时避免了人工的漏检,通过将检测机器人本体1进行拆分成模块化组装的形态,并通过设置的快速拆装机构6、安装工装7对检测机器人本体1上的检测模块2、驱动模块3、从动模块4、控制模块5分别进行装配连接,使得在使用者对轨道上的线路巡检机器人进行装配运输时,可以单独的对某一个模块进行搬运以及拼装,进而减少了对模块单次的搬运、拼装重量,在对机器人进行装配时,便可快速的对检测机器人本体1进行装配并使用,减轻了使用者的劳力负担,通过将检测机器人本体1整体设置在安装工装7上,使得即使检测机器人本体1遇到不同规格的轨道,依旧可以保证检测机器人本体1在拼装完成后,cdd相机21、线扫激光相机22内的传感器抖动误差值在允许范围内,进而实现了检测机器人本体1的精准数据的采集任务。
32.具体的,参照图7,检测模块2包括一cdd相机21以及一线扫激光相机22,cdd相机21用于将轨道上的图像数据转换为电信号并通过检测模块2进行收集传回,驱动模块3用于检测轨道廓形等数据,检测模块2、驱动模块3与控制模块5均电连接。
33.本实施例中,通过设置的cdd相机21可用于对钢轨8上的轨道数据进行采集,通过与线扫激光相机22的配合,结合机器人自动控制方法进而实现通过检测机器人本体1来代替人工对轨道进行检查,在实际使用中,配备设有cdd相机21、线扫激光相机22的检测机器人本体1可满足对地铁轨道、火车轨道以及高铁轨道的场景检测,主要功能可实现对钢轨廓形检测、钢轨磨耗检测、轨道几何参数检测、道床巡检检测异物检测、扣件检测以及限界入侵检测等多种检测任务。
34.具体的,参照图5至图7,驱动模块3包括四个行走轮31,每个行走轮31均卡合安装在其中一个安装工装7上,每个行走轮31的两侧还设有两辅助轮32用于辅助行进。
35.本实施例中,通过设置的行走轮31可通过设置的检测模块2内的电信号进行控制转动,通过设置的行走轮31在安装工装7上的安装,可使得行走轮31在转动时传动安装工装7在钢轨8上滑行,进而完成检测机器人本体1整体在钢轨8上的滑行,通过设置的辅助轮32可用于辅助行走轮31,当驱动模块3、从动模块4在拼装时,通过增设的辅助轮32的辅助可避免驱动模块3、从动模块4在安装时无意的碰撞造成在钢轨8上的脱落,如附图5、附图6所示,
即使在安装碰到驱动模块3、从动模块4时,通过设置在行走轮31两侧的辅助轮32,可使得驱动模块3、从动模块4整体呈倾斜状态而不会直接脱落。
36.具体的,参照图4,快速拆装机构6包括两连接杆61以及若干锁定螺栓62,连接杆61的两端通过若干连接杆61将驱动模块3、从动模块4进行连接。
37.本实施例中,当使用者对线路巡检机器人在钢轨8上进行安装时,首先将安装工装7内的定位座71在钢轨8上定位并使其卡合固定,随后分别将驱动模块3和从动模块4先后卡进钢轨8上的安装工装7上,并使得驱动模块3上的行走轮31与定位座71上的定位座圆弧槽73保持紧抵,再通过快速拆装机构6上的连接杆61将驱动模块3、从动模块4分别通过若干锁定螺栓62进行连接,通过设置的连接杆61、锁定螺栓62可快速的将驱动模块3、从动模块4进行装配连接,进而可快速的将模块化设置的检测机器人本体1进行整体装配,检测机器人本体1的装配顺序如附图中1-4所示。
38.具体的,参照图8,安装工装7包括一定位座71,定位座71卡合设于钢轨8上,每个定位座71上均开设有一定位孔711,相邻一侧钢轨8上设有两安装工装7且两安装工装7之间连接设有一定位座连接杆72,定位座连接杆72的两端分别穿过相邻一端的定位孔711内,每个定位座71的上端面均设有一定位座圆弧槽73供行走轮31卡合安装。
39.本实施例中,通过设置的定位座71可用于对检测机器人本体1的模块进行承载,通过设置的定位孔711可用于对相邻一侧钢轨8上的两个定位座71进行连接,通过设置的定位座圆弧槽73可用于对行走轮31进行卡合,通过设置的控制模块5可对驱动模块3进行电信号控制并使行走轮31转动,通过驱动模块3的转动以及驱动模块3在安装工装7上的卡合,可使得安装工装7在钢轨8上滑动,并进一步使得检测机器人本体1整体在钢轨8上行进。
40.本实用新型的线路巡检机器人安装工装:
41.第一步:当使用者对线路巡检机器人在钢轨8上进行安装时,首先将安装工装7内的定位座71在钢轨8上定位并使其卡合固定,随后分别将驱动模块3和从动模块4先后卡进钢轨8上的安装工装7上,并使得驱动模块3上的行走轮31与定位座71上的定位座圆弧槽73保持紧抵,再通过快速拆装机构6上的连接杆61将驱动模块3、从动模块4分别通过若干锁定螺栓62进行连接,当驱动模块3、从动模块4连接完成后,随后将控制模块5放入驱动模块3、从动模块4的间距空间内,最后将检测模块2放在控制模块5上,并将驱动模块3、从动模块4上的锁定螺栓62旋紧便完成了对检测机器人本体1的整体的安装;
42.第二步:当装配完成后,检测机器人本体1便可通过检测模块2、控制模块5对钢轨8上的数据进行扫描采集,通过设置的控制模块5可对驱动模块3进行电信号控制并使行走轮31转动,通过驱动模块3的转动以及驱动模块3在安装工装7上的卡合,可使得安装工装7在钢轨8上滑动,并进一步使得检测机器人本体1整体在钢轨8上行进,最终完成对钢轨8的整段线路的检测以及数据采集。
43.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1