一种网络化机器人系统的有限时间竞争编队控制方法
本发明涉及机器人分布式领域,尤其涉及一种网络化机器人系统的有限时间竞争编队控制方法。
背景技术:
1、在机器人控制领域,操纵机器人之间具有合作和竞争关系的网络化机器人系统协同完成任务对于提高生产的自动化程度以及提高工作效率有着十分重要的意义。进入21世纪,与机器人相关的应用场景渐渐的从汽车等领域向制造业、服务业、军事作业等方向迈进。因此,提升机器人之间具有合作和竞争关系的网络化机器人系统的协同控制水平,同时不断提高在极其复杂的危险环境下的工作效率,降低作业人员安全风险正是机器人控制领域的目标。
2、在复杂的控制任务中,单个机器人能够完成的任务有限。因此,考虑网络化机器人系统的编队控制,结合图论知识,将多个机器人之间的通信关系建立为一个信息交互拓扑图。结合建立的信息拓扑图实现网络化机器人系统的编队控制算法的设计,提升了机器人能够完成的任务多样性,拓宽了实际应用范围。
3、目前大多数的网络化机器人系统的控制方法仅适用于渐进收敛时间的控制任务,且局限于研究用单积分器、双积分器动力学模型描述的机器人系统,并忽略了外部扰动、模型参数不确定性的影响。而在实际应用中,外部扰动、模型参数不确定性是不可避免的,且运用欧拉-拉格朗日动力学来描述的网络化机器人系统能更严谨地描述现实生产中的应用。另外,很多实际的应用中对完成任务的时间会有需求,从而需要设计更新颖的控制算法来实现更短时间内的任务。
4、因此,结合上述的实际应用上的需求,设计一种网络化机器人系统的有限时间竞争编队控制方法具有重要意义。
技术实现思路
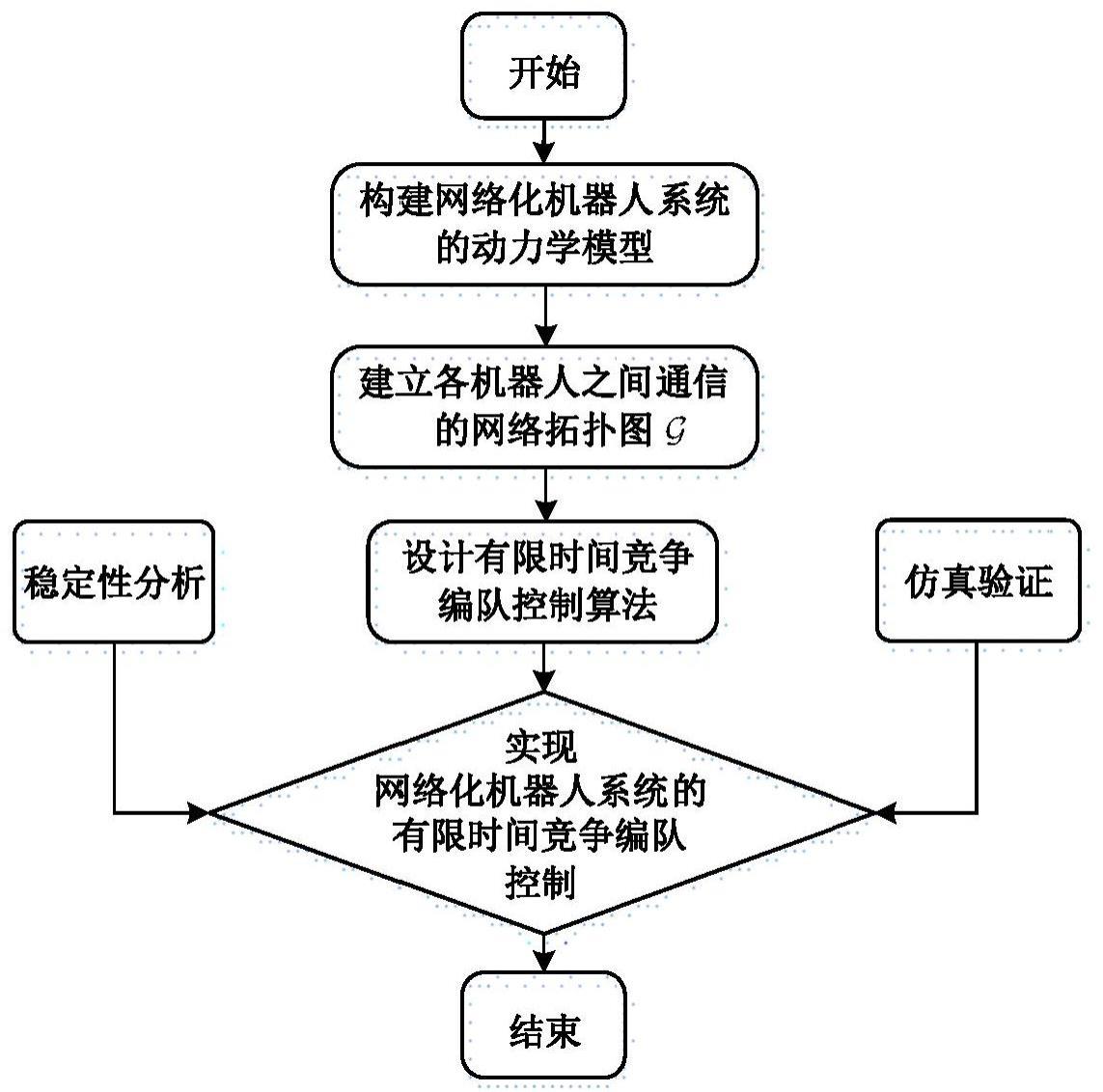
1、鉴于现有技术中存在的问题,本发明一种网络化机器人系统的有限时间竞争编队控制方法,其特征在于,所述有限时间竞争编队控制方法包括以下步骤:
2、步骤s1:考虑网络化机器人系统中模型参数不确定性和外部扰动以及机器人之间的合作和竞争关系,对n个2自由度机器人构建网络化机器人系统的动力学模型方程;
3、步骤s2:针对具有n个机器人的网络化机器人系统,依据图论的知识建立起各机器人之间通信的有向符号拓扑图,所述有向符号拓扑图用于描述机器人之间的信息交互;
4、步骤s3:在满足所述动力学模型和有向符号拓扑图的前提条件下,设计有限时间竞争编队控制算法,该算法采用分层的控制框架,所述分层的控制框架包括分布式估计层算法和本地层算法;所述分布式估计层算法可以确保每个机器人能在有限时间内获得相应领导者的准确信息,所述本地层算法可以实现机器人的有限时间竞争编队跟踪;
5、步骤s4:根据设计的有限时间竞争编队控制算法对网络化机器人系统进行稳定性分析和仿真验证,验证出有限时间竞争编队控制算法可以实现网络化机器人系统的有限时间竞争编队控制任务。
6、优选地,所述动力学模型表达式如下:
7、
8、其中,i∈{1,2,…,8}表示机器人的序号,以及分别表示机器人关节的位置、速度和加速度;正定惯性矩阵为:
9、科里奥利离心矩阵为:重力矩阵为:其中,表示输入力矩,di()是外部扰动且满足di()≤δi,d,δi,d为一个已知的常数,和是动力学不确定项。
10、优选地,所述模型表达式还可以表示为:
11、
12、其中,
13、优选地,竞争时变编队跟踪的领航者的数学表达式为:
14、
15、其中,v0和a0表示领航者的位置状态、速度和加速度。
16、优选地,有向符号拓扑图为其中为n个机器人的顶点集,即机械臂的数目;表示连接任意两个机器人的边的集合;表示带有邻接元素的权重矩阵,其中aij表示权重矩阵第i行第j列的元素,若第j个机器人与第i个机器人之间有连接,则aij≠0,否则aij=0,且第i个机器人本身不存在自循环连接,即aii=0,第i个机器人的邻接机器人集合记为通过邻接元素的大小表示各机械臂所传递能量的大小;根据定义的邻接元素的权重矩阵,确定有向符号拓扑图的拉普拉斯矩阵其中,所述拉普拉斯矩阵定义为:其中lij为矩阵第i行第j列的元素,在i=j时,否则lij=-aij;根据每个机器人与其对应领航者之间的信息状况,确定有向符号拓扑图的对角权重矩阵所述对角权重矩阵定义为:其中,bi,i∈{1,2,…,n}为矩阵中的元素,根据机器人对其领航者之间的通信情况,若第i个机器人能够直接接收其领航者的信息,则bi>0,否则bi=0。
17、优选地,所述网络化机器人系统的有限时间分层控制算法的原始数学形式设计如下:
18、
19、
20、其中,表示网络化机器人系统中的第i机器人,在本地层算法中,τi1和τi2分别表示等效控制律和滑模控制律;控制参数α>0,1<γ<2;本地层位置和速度跟踪误差形式为:和其中,和为机器人关节位置qi和速度的估价值;滑模矢量设计为其中,sig(x)y=col(sign(x1)|x1|y,sign(x2)|x2|y,…,sign(xn)|xn|y),其中y>0,sign(x)为符号函数;表示为正定对称矩阵,σ>0。
21、在分布式估计层算法中,控制增益参数ζ1,ζ2>0,ri和分别表示编队偏移量和编队偏移量的一阶导数;即:如果有向符号拓扑图可以分为两个互补的子集和且满足则有向符号拓扑图是结构平衡的;否则,不是结构平衡的;在分布式估计层算法中,竞争控制参数和
22、优选地,结合分布式估计层算法中的位置和速度估计误差形式,其中网络化机器人系统的有限时间分层控制算法的数学形式转化为:
23、
24、对闭环系统分别构造李雅普诺夫函数和其中,矩阵进行稳定性分析得到闭环系统是稳定的。
25、结合所述闭环系统和稳定性分析结果,得到网络化机器人系统的有限时间竞争编队跟踪误差满足以下条件:
26、
27、对于所有的其中,εi(t)=qi-ri-φiq0,tf为系统达到收敛的有限时间,即得到所述的网络化机器人系统的有限时间竞争编队控制。
28、与现有技术方案相比,本发明至少具有以下有益效果:
29、1)相比于同类的控制方法,本发明提供的控制方法采用分层的控制框架,降低了控制算法的复杂程度,节约了控制成本,具有更强的鲁棒性和更高的执行效率;
30、2)相比于同类的控制方法,本发明考虑机器人模型中的外部扰动、模型参数不确定性以及机器人之间合作和竞争关系,使得竞争编队控制实用性更强,提升了编队控制方法的新颖性;
31、3)相比于渐进收敛时间控制方法,本发明所设计的控制算法能够保证网络化机器人系统在有限时间内跟踪到相应的目标,具有更好的跟踪性能;
32、4)相比于时不变编队控制方法,本发明所设计的时变编队控制算法能够保证网络化机器人系统适应更加复杂多变的实际应用场景。
技术特征:
1.一种网络化机器人系统的有限时间竞争编队控制方法,其特征在于,所述有限时间竞争编队控制方法包括以下步骤:
2.根据权利要求1所述的网络化机器人系统的有限时间竞争编队控制方法,其特征在于,所述动力学模型表达式如下:
3.根据权利要求2所述的网络化机器人系统的有限时间竞争编队控制方法,其特征在于,所述模型表达式还可以表示为:
4.根据权利要求1所述的网络化机器人系统的有限时间竞争编队控制方法,其特征在于,竞争时变编队跟踪的领航者的数学表达式为:
5.根据权利要求1所述的网络化机器人系统的有限时间竞争编队控制方法,其特征在于,有向符号拓扑图为其中为n个机器人的顶点集,即机械臂的数目;表示连接任意两个机器人的边的集合;表示带有邻接元素的权重矩阵,其中aij表示权重矩阵第i行第j列的元素,若第j个机器人与第i个机器人之间有连接,则aij≠0,否则aij=0,且第i个机器人本身不存在自循环连接,即aii=0,第i个机器人的邻接机器人集合记为通过邻接元素的大小表示各机械臂所传递能量的大小;根据定义的邻接元素的权重矩阵,确定有向符号拓扑图的拉普拉斯矩阵其中,所述拉普拉斯矩阵定义为:其中lij为矩阵第i行第j列的元素,在i=j时,否则lij=-aij;根据每个机器人与其对应领航者之间的信息状况,确定有向符号拓扑图的对角权重矩阵所述对角权重矩阵定义为:其中,bi,i∈{1,2,…,n}为矩阵中的元素,根据机器人对其领航者之间的通信情况,若第i个机器人能够直接接收其领航者的信息,则bi>0,否则bi=0。
6.根据权利要求1所述的网络化机器人系统的有限时间竞争编队控制方法,其特征在于,所述网络化机器人系统的有限时间分层控制算法的原始数学形式设计如下:
7.根据权利要求1所述的网络化机器人系统的有限时间竞争编队控制方法,其特征在于,结合分布式估计层算法中的位置和速度估计误差形式,其中网络化机器人系统的有限时间分层控制算法的数学形式转化为:
技术总结
本发明涉及机器人控制领域,公开了一种网络化机器人系统的有限时间竞争编队控制方法。该方法包括如下步骤:1)对N个机器人构建网络化机器人系统的动力学模型;2)针对具有N个机器人的网络化机器人系统,并依据图论的知识建立起各机器人之间通信的网络拓扑图;3)根据构建的动力学模型和网络拓扑图设计了有限时间竞争编队控制算法,该算法采用分层的控制框架,分布式估计层算法可以确保每个机器人能在有限时间内获得相应领导者的准确信息,本地层算法可以实现机器人的有限时间竞争编队跟踪;4)根据设计的有限时间竞争编队控制算法对网络化机器人系统进行稳定性分析和仿真验证。
技术研发人员:黄凯伦,刘雄华,何顶新,李双双,邓伟明,李玲,刘婷婷,刘海
受保护的技术使用者:武汉工商学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!