变高度可重构石窟寺病害智能探测机器人及其控制方法
本发明属于文物检测,具体涉及一种变高度可重构石窟寺病害智能探测机器人及其控制方法。
背景技术:
1、石窟文物作为中华民族优秀传统文化的典型代表,广泛分布于我国甘肃、山西、河南及其以东的广大地区,以其丰富的艺术形式和文化底蕴成为今天了解和研究我国古代建筑、雕刻和宗教信仰等的重要形象资料,也成为追溯古代中西方文化交流的实物佐证。由于历史和自然的原因,大多石窟依山而建,有的甚至直接暴露于旷野之中,随着时间的推移,这些石窟文物逐渐演变出诸如山体局部坍塌、洞窟雨水侵蚀、环境风貌破坏及文物稳定性破坏等多种病害。为了更好的保护这些优秀传统石窟文物,需要采用专业探测设备定期对文物本体展开系统的检测与研究,以便深入了解病害发育规律,为进一步的文物修缮提供理论依据。
2、对于石窟病害的检测,又有其特殊性。首先,石窟病害多种多样,既包括壁面的风化、盐蚀、掉块等,也包括深度的裂隙、沁水等,需要采用多种多样的传感器进行检测。其次,岩壁表面易于损坏,不得触碰,要求检测设备与壁面之间保持一定安全距离。另外,岩壁结构复杂多变,壁面的壁画、佛像及小型洞室呈复杂几何状态,为保障病害信息采集质量,要求数据采集设备的采集方向始终垂直于壁面切线方向。然后,石窟寺洞窟结构也复杂多变,有些洞室内部有立柱,有些佛像姿态变化多样,而且洞窟尺度差异也很大,小的高度不足1m,大的则有几十米。这为石窟寺病害检测提出了很高的要求。传统的检测手段主要是工作人员手持罗盘、钢尺、数码相机及扫描仪等检测设备在现场进行环境测绘和病害拍照取样,后期通过实验室数据分析研究各病害对石窟文物的影响程度;这种方法虽然可以尽可能地保护文物,但存在诸如工作效率低下、存在检测死角以及检测周期长等诸多缺陷,不利于实现石窟岩壁探伤工作的常态化和系统化。因此,对于石窟文物的病害研究和破坏修复工作急需一个新的突破口,需要一款高适应性多自由度的全自动智能探测设备。
技术实现思路
1、基于现有技术存在的问题,本发明提供了一种变高度可重构石窟寺病害智能探测机器人及其控制方法,解决现有的石窟病害检测设备和方法工作效率低、存在检测死角及检测周期长的问题。
2、为了实现上述目的,本发明采用如下技术方案予以实现:
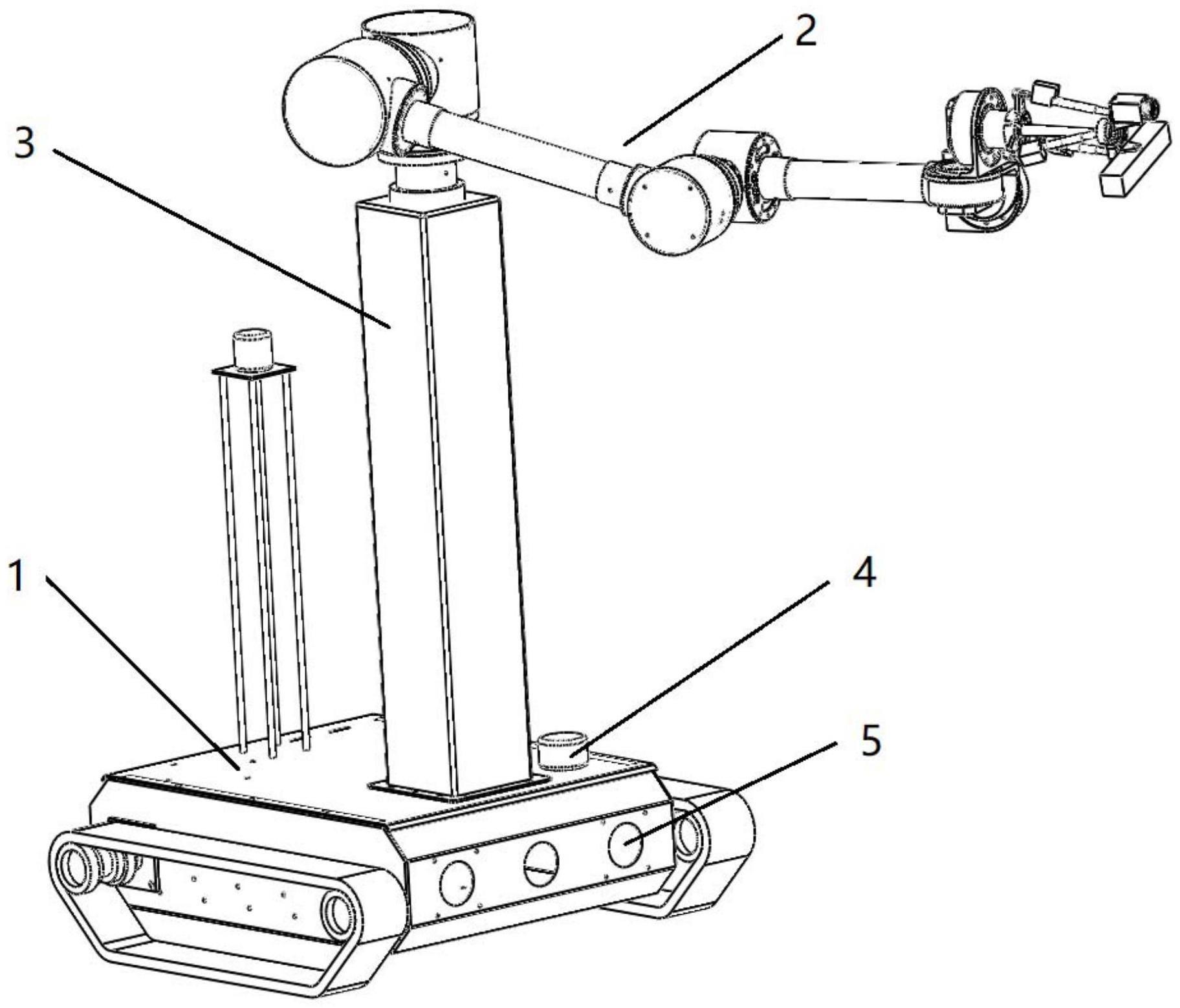
3、变高度可重构石窟寺病害智能探测机器人,包括履带小车行走系统、机械臂探测系统、用于调节机械臂探测系统高度的高度调节系统、工作状态感知系统和自主规划系统;
4、所述高度调节系统、工作状态感知系统和自主规划系统均设置在履带小车行走系统上,所述机械臂探测系统设置在高度调节系统上;
5、所述机械臂探测系统包括六自由度回转关节模块和三自由度腕关节模块,所述六自由度回转关节模块包括六个串联的回转关节,其中第一个回转关节的旋转输出端连接在高度调节系统上;
6、所述三自由度腕关节模块包括静平台、立柱、可伸缩的电动推杆、动平台、用于搭载各种岩壁病害探测仪器的载物架和腕关节控制模块,所述静平台一端与六自由度回转关节模块中的第六个回转关节的旋转输出端连接,静平台的另一端通过立柱及电动推杆与动平台连接,所述立柱与动平台可活动连接,且动平台能够绕立柱旋转或者相对立柱倾斜,所述电动推杆与静平台、动平台之间均可活动连接,围绕立柱设置有多个电动推杆,通过所述腕关节控制模块控制电动推杆的伸缩长度使得动平台绕立柱旋转或者倾斜;所述载物架连接在动平台上;
7、所述工作状态感知系统包括二维雷达、三维雷达和双目相机,所述二维雷达和三维雷达均设置在履带小车行走系统上表面,所述二维雷达用于对环境二维地形建模;所述三维雷达用于探测石窟寺空间信息以及感知机械臂整体的实时位姿;所述双目相机设置在所述载物架上,用于采集石窟寺局部位置的三维点云图并定位探测机器人在二维地面和三维空间实时位置;
8、所述自主规划系统包括上位机和下位机,所述下位机包括用于控制履带小车行走系统中履带轮速度的电控模块、用于控制高度调节系统举升高度的高度控制模块、六个回转关节各自用于驱动关节电机的关节控制模块、用于控制电动推杆伸缩长度的腕关节控制模块;
9、所述上位机用于接收二维雷达、三维雷达、双目相机采集的空间图像信息,并基于总体任务规划各下位机的实时运行路径,向各下位机下发指令。
10、优选的,所述履带小车行走系统包括壳体、履带轮、第一驱动电机、减速器、蓄电池和电控模块,所述第一驱动电机、减速器、蓄电池和电控模块布置在壳体内,第一驱动电机与减速器连接,减速器的输出轴连接履带轮的主动轮。
11、优选的,所述六自由度回转关节模块包括依次串接的第一回转关节、第二回转关节、第一连杆、第三回转关节、空关节、第二连杆、第四回转关节、第五回转关节和第六回转关节,所述第一回转关节的固定输入端与第二回转关节的旋转输出端连接,第二回转关节的固定输入端通过第一连杆与第三回转关节的固定输入端连接,第三回转关节的旋转输出端与空关节连接,空关节另一端通过第二连杆与第四回转关节的固定输入端连接,第四回转关节的旋转输出端通过l型连接件与第五回转关节连接,第五回转关节通过l型连接件与第六回转关节连接,第六回转关节的旋转输出端用于连接所述静平台;
12、所述第一回转关节的输出轴轴线、第五回转关节的输出轴轴线与地面垂直,所述第二回转关节的输出轴轴线、第三回转关节的输出轴轴线、第四回转关节的输出轴轴线、第六回转关节的输出轴轴线与地面平行。
13、优选的,所述第一回转关节包括主轴、第二驱动电机、编码器、制动器、谐波减速器、关节控制模块和外壳,所述外壳整体为l型,外壳内部从上到下依次布置有所述谐波减速器、第二驱动电机、编码器、制动器和关节控制模块,所述第二驱动电机、编码器、制动器、谐波减速器(20105)均为中空结构,套设在所述主轴上;所述主轴为中空轴,内部用于走线;所述关节控制模块连接在壳体底部;
14、其余五个回转关节的构型与第一回转关节构型相同。
15、优选的,所述关节控制模块包括控制板、驱动板和检测板,所述控制板用于接收上位机发送的指令并进行分析处理,所述驱动板用于驱动第二驱动电机运转,所述检测板用于采集所述编码器测量的速度位置信息并反馈给控制板。
16、优选的,所述第一连杆和第二连杆均包括中空连接管和设置在中空连接管两端的连接法兰。
17、优选的,所述高度调节系统包括第三驱动电机、举升电缸缸体、设置在举升电缸缸体两端的连接部、高度控制模块,所述两个连接部分别与履带小车行走系统的上盖板、第一个回转关节的旋转输出端连接;所述第三驱动电机驱动举升电缸缸体提升或者下降。
18、进一步的,所述三维雷达通过举升支架支撑在履带小车行走系统上。
19、本发明还公开了上述变高度可重构石窟寺病害智能探测机器人的控制方法,包括以下步骤:
20、步骤1,工作人员通过操作手柄远程控制探测机器人的履带小车行走系统在待检测石窟洞窟内行走,完成待检测石窟洞窟二维平面的建模,获得初始导航地图;
21、步骤2,探测机器人开启自主导航和自动控制模式,基于三维雷达所建立的空间地图和双目相机所构建的局部特征模型,控制机械臂探测系统对石窟寺岩壁进行损伤探测;
22、步骤3,根据洞窟内实际高度,不断调整高度调节系统的举升高度,每调整一次高度,根据步骤2进行探测,直至完成对整体石窟岩壁的病害探测;
23、步骤4,更换探测仪器重复上述操作,实现对石窟岩壁不同病害的全面探测,全部探测工作结束后控制探测机器人回收。
24、优选的,所述步骤2具体包括:
25、步骤2.1,切换所有控制模块为自主控制模式,三维雷达开始对整体空间信息进行初步建模,上位机根据探测任务确定探测机器人初始点,自主规划履带小车行走系统路线,并给所述电控模块发送控制指令,电控模块驱动履带小车行走系统行驶到探测初始位置;
26、步骤2.2,上位机分析三维雷达采集的空间信息,结合初始机械臂探测系统探测范围限制,确定定点范围内机械臂末端探测仪器的探测范围,并确定探测初始点和探测顺序;之后基于初始机械臂末端位置和空间障碍物反推各机械臂中各连杆在空间中所处的位置,从而反推在某一末端位置时各回转关节旋转输出轴相对于初始位置旋转的角度,接着上位机向第一个回转关节的关节控制模块发送其目标转角;第一个回转关节的关节控制模块在接收指令后,在不对周边环境造成影响的范围内规划转矩、转速和电机转动角度,驱动第二驱动电机运转;第二个回转关节和第三个回转关节的关节控制模块接收控制指令后进行与第一个回转关节相同的步骤,依次提升机械臂末端的探测高度;第四个回转关节至第六个回转关节调节末端的位姿和精准位置,根据实际空间环境决定依次作用顺序;
27、步骤2.3,双目相机对被探测的局部区域进行建模后将数据传入上位机,上位机通过分析病害延伸的方向和角度,确定针对不同病害的实际探测入射角度并发送到腕关节控制模块,腕关节控制模块根据数据建模确定各电动推杆所需伸缩的长度;
28、步骤2.4,对初始位置点病害探测结束后,上位机规划机械臂末端搭载的探测设备在矩形区域内上下或左右顺次检测,并基于检测顺序控制机械臂向下一检测点移动,同时基于上述步骤2.2和步骤2.3再次规划各回转关节和腕关节的运动过程,并再次发送给下位机进行执行,如此往复,直至完成对所规划矩形面的全覆盖;
29、步骤2.5,完成定点矩形区域探测后,上位机下发指令控制履带小车行走系统移动到下一定点位置,并再次选定初始检测点和依次检测顺序,接着控制回转关节和腕关节,完成新一轮区域的探测,如此往复,直至探测机器人回到初始运动点,完成洞窟一周的病害探测。
30、与现有技术相比,本发明的有益效果是:
31、(1)本发明的机械臂探测系统采用可重构模块化设计,其回转关节、连杆以及末端腕关节设置为集驱动、控制与通信为一体的独立模块,并留有便携机械电气接口,在工作中可根据实际需要随时快速更换机器人整体构型,使得不同工况下的文物探测工作更加灵活轻便,适应结构复杂多变石窟寺的病害探测要求。
32、(2)本发明的机械臂探测系统采用“6+3”自由度构型,使机械臂整体运行灵敏度大大提高,可在检测过程中最大限度的保护文物表明免遭损坏,适应表面易损和安全探测的石窟寺病害探测要求。
33、(3)本发明基于二维雷达、三维雷达和双目相机搭建工作状态感知系统,分别服务于履带小车的平面移动、机械臂系统的空间探测以及腕关节的角度微调,使整体探测机器人的状态感知和运动规划更加准确高效,保障了文物探测作业过程的安全性,避免检测设备与文物碰撞事件发生。
34、(4)本发明的自主规划控制系统中上位机采用一条can总线与各下位机并联,使得整体探测机器人系统走线方便;同时can总线传输快,故障率低,具有故障检测和封闭功能,使得机器人的信号传输效率大大提高,保障了探测作业效率,克服现有探测方法中效率低下的缺陷。
35、(5)本发明的变高度探测机器人底盘采用履带小车行走系统,运行平稳,越障性能好,满足洞窟内凹凸不平地面行走要求;同时设置有分离式机身高度调节系统,可满足洞窟壁面病害探测要求;此外履带小车行走系统、高度调节系统和机械臂探测系统三大部分拆装方便,便于恶劣地理环境下机器人的搬运。因此本发明具有很高的环境适应性,可以基本满足现有各种结构石窟寺的探测工作要求。
36、(6)本发明采用轻量化设计,结构简单、质量轻便、功能多样且便于携带,具有很高的通用性。
37、本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!