一种SCARA机器人的制作方法
本发明涉及工业机器人,特别是涉及一种scara机器人。
背景技术:
1、目前工业领域,包括汽车行业、电子电器行业、工程机械行业等已使用大量工业机器人。工业机器人是集精密化、柔性化、智能化、软件应用开发等先进制造技术于一体,通过对过程实施检测、控制、优化、调度、管理和决策,实现增加产量、提高质量、降低成本、减少资源消耗和环境污染,是工业自动化水平的最高体现。
2、其中,选择顺应性装配机器人手臂(selective compliance assembly arm)即scara,是一种圆柱坐标型的特殊类型的工业机器人。scara机器人具有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。另一个关节是移动关节,可用于完成末端件在垂直平面的运动。scara在二维平面的方向上具有顺从性,在垂直方向上具有良好地刚度,从而适合于装配印刷电路板和电子零部件,并且scara具有类似人手臂的两杆结构,从而可以伸进有限空间中作业,从而适合于搬动和取放物件。
3、现有技术中,scara机器人的本体各部分呈串联分布,这种分布方式容易导致机体自身的惯量过大,从而影响机器人动态响应性能及运动稳定性。
技术实现思路
1、基于此,未解决上述技术问题,本发明的目的是提供一种scara机器人,scara机器人可以降低机体的惯量,从而提高机器人的性能。
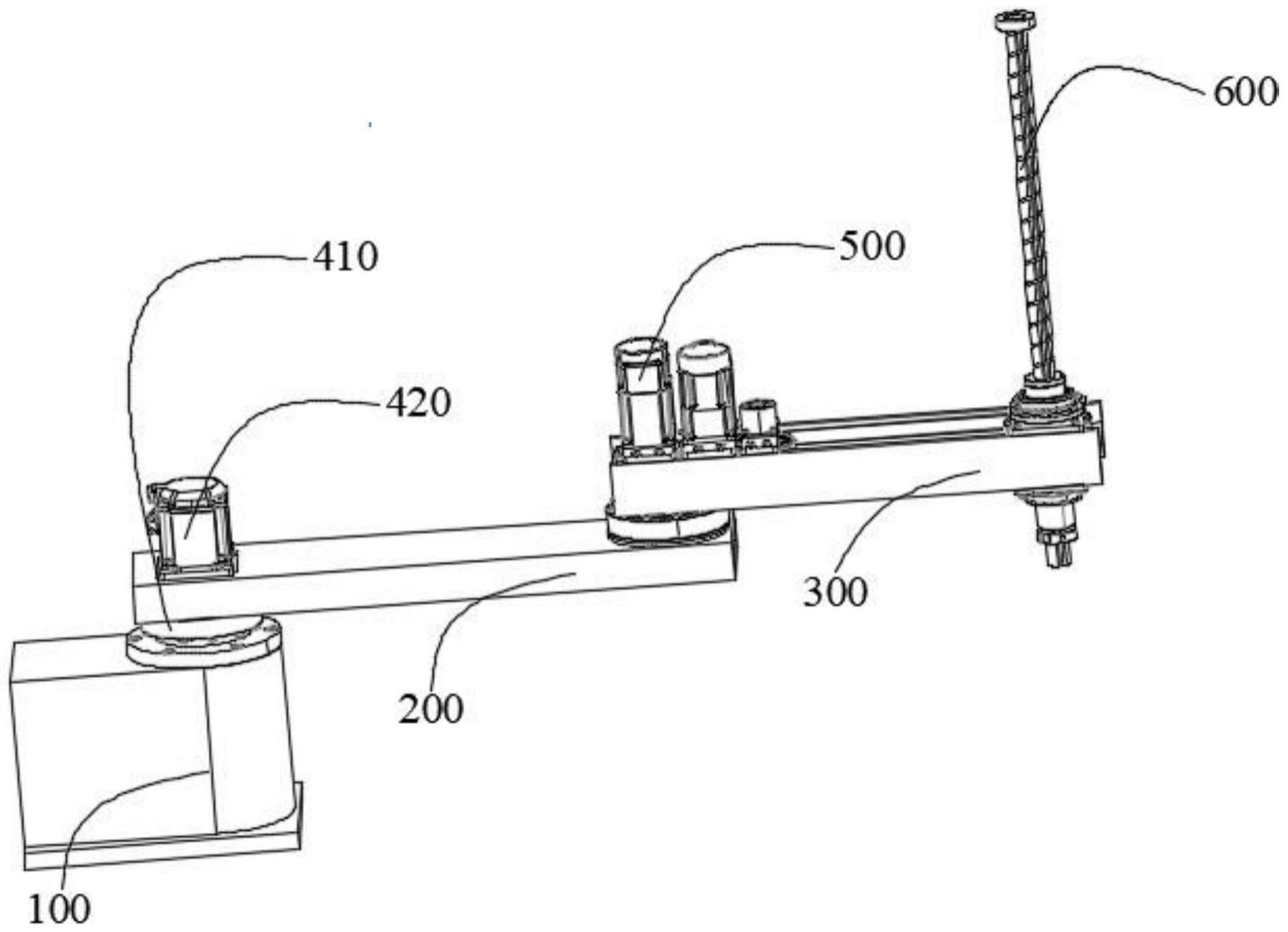
2、本发明提供一种scara机器人,scara机器人包括:基座、第一机械臂、第二机械臂、第一传动机构、第二传动机构以及执行机构;所述第一传动机构包括第一旋转件、第二旋转件,所述第一旋转件设置于所述基座上,所述基座通过所述第一旋转件与所述第一机械臂连接,所述第一旋转件驱动所述第一机械臂转动,所述第二旋转件设置于所述第一机械臂上,所述第一机械臂通过所述第二旋转件与所述第二机械臂连接,所述第二旋转件驱动所述第二机械臂转动;所述第二传动机构以及所述执行机构设置于所述第二机械臂上,所述第二传动机构与所述执行机构连接,所述执行机构在所述第二传动机构的作用下实现不同的工作状态,所述工作状态包括上下移动、旋转运动。
3、进一步地,本发明所提供的scara机器人的所述第一旋转件包括第一电机以及与所述第一电机传动连接的第一减速器,所述第一电机以及所述第一减速器固定连接于所述基座,所述第一减速器与所述第一机械臂转动连接。
4、进一步地,本发明所提供的scara机器人的所述第二旋转件包括第二电机以及与所述第二电机传动连接的第二减速器,所述第二电机以及所述第二减速器固定连接于所述第一机械臂,所述第二减速器与所述第二机械臂转动连接。
5、进一步地,上述所提供的scara机器人的所述第二减速器为带式减速器,所述第二电机通过第一皮带与所述第二减速器连接。
6、进一步地,上述所提供的scara机器人的所述第二电机设置于所述第一机械臂邻近基座的一端,所述第二减速器设置于所述第一机械臂的另一端。
7、进一步地,本发明所提供的scara机器人的所述执行机构包括丝杠以及套设在所述丝杠上的滚珠螺母以及花键螺母,所述第二传动机构与所述滚珠螺母以及所述花键螺母连接,所述滚珠螺母受驱转动以带动所述丝杠上下移动,所述花键螺母受驱转动以带动所述丝杠旋转运动。
8、进一步地,上述所提供的scara机器人的所述第二传动机构包括固定设置于所述第二机械臂的第三旋转件以及第四旋转件,所述第三旋转件与所述滚珠螺母连接,所述第四旋转件与所述花键螺母连接。
9、进一步地,所提供的scara机器人的所述第三旋转件为第三电机,所述第三电机通过第二皮带与所述滚珠螺母连接。
10、可选地,本发明所提供的scara机器人的所述第四旋转件包括第四电机以及第四减速器,所述第四电机通过第三皮带与所述第四减速器连接,所述第四减速器通过第四皮带与所述花键螺母连接。
11、进一步地,本发明所提供的scara机器人的所述第二传动机构设置于所述第二机械臂邻近第一机械臂的一端,所述执行机构设置于所述第二机械臂的另一端。
12、本发明产生的有益效果至少包括:
13、本发明提供的scara机器人包括基座、第一机械臂、第二机械臂、第一传动机构、第二传动机构以及执行机构。其中,第一传动机构包括第一旋转件和第二旋转件,第一机械臂通过第一旋转件与基座转动连接,设置在基座上的第一旋转件驱动第一机械臂相对于基座转动。第二机械臂通过设置在第一机械臂上的第二旋转件与第一机械臂连接,第二旋转件驱动第二机械臂相对于第一机械臂转动。所述第二传动机构以及所述执行机构设置于所述第二机械臂上,所述第二传动机构与所述执行机构连接,所述执行机构在所述第二传动机构的作用下实现上下移动以及旋转运动。其中,相比于现有技术中第二旋转件以及第二传动机构均设置在第二机械臂上,将第二旋转件和第二传动机构分别设置在第一机械臂和第二机械臂上,可以降低原先第二机械臂的惯量,从而提高机器人的动态性能。因此,本发明提供的scara机器人可以降低机体的惯量,从而提高机器人的性能。
技术特征:
1.一种scara机器人,其特征在于,包括:基座、第一机械臂、第二机械臂、第一传动机构、第二传动机构以及执行机构;
2.根据权利要求1所述的scara机器人,其特征在于,所述第一旋转件包括第一电机以及与所述第一电机传动连接的第一减速器,所述第一电机以及所述第一减速器固定连接于所述基座,所述第一减速器与所述第一机械臂转动连接。
3.根据权利要求1所述的scara机器人,其特征在于,所述第二旋转件包括第二电机以及与所述第二电机传动连接的第二减速器,所述第二电机以及所述第二减速器固定连接于所述第一机械臂,所述第二减速器与所述第二机械臂转动连接。
4.根据权利要求3所述的scara机器人,其特征在于,所述第二减速器为带式减速器,所述第二电机通过第一皮带与所述第二减速器连接。
5.根据权利要求4所述的scara机器人,其特征在于,所述第二电机设置于所述第一机械臂邻近基座的一端,所述第二减速器设置于所述第一机械臂的另一端。
6.根据权利要求1所述的scara机器人,其特征在于,所述执行机构包括丝杠以及套设在所述丝杠上的滚珠螺母以及花键螺母,所述第二传动机构与所述滚珠螺母以及所述花键螺母连接,所述滚珠螺母受驱转动以带动所述丝杠上下移动,所述花键螺母受驱转动以带动所述丝杠旋转运动。
7.根据权利要求6所述的scara机器人,其特征在于,所述第二传动机构包括固定设置于所述第二机械臂的第三旋转件以及第四旋转件,所述第三旋转件与所述滚珠螺母连接,所述第四旋转件与所述花键螺母连接。
8.根据权利要求7所述的scara机器人,其特征在于,所述第三旋转件为第三电机,所述第三电机通过第二皮带与所述滚珠螺母连接。
9.根据权利要求7所述的scara机器人,其特征在于,所述第四旋转件包括第四电机以及第四减速器,所述第四电机通过第三皮带与所述第四减速器连接,所述第四减速器通过第四皮带与所述花键螺母连接。
10.根据权利要求6-9任一项所述的scara机器人,其特征在于,所述第二传动机构设置于所述第二机械臂邻近第一机械臂的一端,所述执行机构设置于所述第二机械臂的另一端。
技术总结
本发明公开了一种SCARA机器人,涉及工业机器人的技术领域。本发明的目的在于提供一种SCARA机器人,其包括:基座、第一机械臂、第二机械臂、第一传动机构、第二传动机构以及执行机构;第一传动机构包括第一旋转件、第二旋转件,第一旋转件设置于基座上,基座通过第一旋转件与第一机械臂连接,第一旋转件驱动第一机械臂转动,第二旋转件设置于第一机械臂上,第一机械臂通过第二旋转件与第二机械臂连接,第二旋转件驱动第二机械臂转动;第二传动机构以及执行机构设置于第二机械臂上,第二传动机构与执行机构连接,执行机构在第二传动机构的作用下实现不同的工作状态,工作状态包括上下移动、旋转运动。SCARA机器人可以降低机体的惯量,从而提高机器人的性能。
技术研发人员:余永耀
受保护的技术使用者:广东天机机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!