一种用于操作大惯性物体的机器人变导纳控制方法与流程
本发明涉及工业机器人,特别涉及一种用于操作大惯性物体的机器人变导纳控制方法。
背景技术:
1、近些年来,随着机器人行业的发展,人-机器人协作的应用场景越来越多,特别是在工业环境中,这种人-机之间的协作可以显著提高生产率和效率。在工业领域的人机协作中,为了满足控制要求通常采用变导纳控制,其中,导纳参数的选取对控制效果的影响是决定性的。
2、对于人机协作的变导纳控制器的设计,需要满足两个指标:减少人的体力劳动和强增人对任务的控制感。传统设计思路主要集中在阻尼参数的选取,通常认为其参数取决于人机相互作用的速度,根据机器人末端执行器的速度,期望的阻尼可以在两个离散的预设值之间切换,或者将阻尼系数选择为速度的递减函数,低速度对应较高的阻尼而高速度对应较小的阻尼,但是,此方法对具有大惯性物体的协同操纵会引起高动量,这意味着取决于交互速度的可变阻尼不一定会减少过冲和/或振荡;还有一种根据加速度来调整目标惯性和阻尼矩阵的方法,可以在一定程度上减少协同操纵大惯性物体所引起高动量,但却大大削弱了人对协同操作任务的控制感。
3、上述技术方式的主要缺陷与不足在于:传统方法针对工业场景下的大惯量物体性能较差,会存在较大过冲和振荡,甚至会削弱人对协同操作任务的控制感。
技术实现思路
1、本发明的目的旨在至少解决所述技术缺陷之一。
2、为此,本发明的目的在于提出一种用于操作大惯性物体的机器人变导纳控制方法。
3、为了实现上述目的,本发明的实施例提供一种用于操作大惯性物体的机器人变导纳控制方法,包括如下步骤:
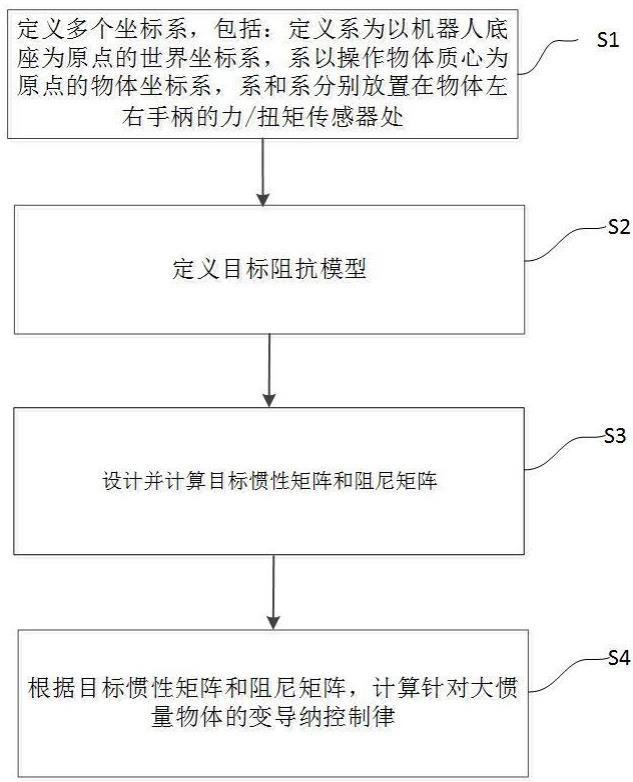
4、步骤s1,定义多个坐标系,包括:定义系为以机器人底座为原点的世界坐标系,系以操作物体质心为原点的物体坐标系,系和系分别放置在物体左右手柄的力/扭矩传感器处,有以下相对于坐标系的广义位姿:
5、
6、其中,为n自由度机械臂关节角度向量;x0(q),x1(q),x2(q),分别是系{0}、系(1)、系{2}相对于系{w}的广义位姿;
7、步骤s2,定义目标阻抗模型,在人应该能够自由地物理移动机器人的情况下,目标阻抗模型不包括刚度项,故基于系给出所述目标阻抗模型的公式如下:
8、
9、其中,为目标惯性矩阵,为目标阻尼矩阵,、分别为系的广义运动速度和广义运动加速度;为系的力旋量,
10、对设置下限,鉴于此限制,给出了目标惯性矩阵的选择:
11、
12、其中,是实际操作对象惯性的恒定部分, 为操作对象的质量,为在系下的恒定对角惯性张量;o3是三阶0阵,3x3的矩阵,元素都是0;i3是三阶单位阵,3x3的矩阵,对角元素都是1,其余为0;
13、步骤s3,设计并计算目标惯性矩阵和阻尼矩阵, ;
14、其中,r是实数集,λ是影响阻尼值对功率变化敏感度的可调参数;分别为最小阻尼值和最大阻尼值的恒定对角矩阵,为影响阻尼值对功率变化敏感度的可调参数,为从人传递到机器人的功率,定义如下:
15、 ;
16、步骤s4,根据目标惯性矩阵和阻尼矩阵,计算针对大惯量物体的变导纳控制律。
17、进一步,在所述步骤s1中,广义姿态包括位置向量和方向矩阵,其中;pi是一个位置向量,也就是相对于参考坐标系原点的x、y、z方向上的位移,是一个3x1的矩阵;方向矩阵是一个旋转矩阵,相对于参考坐标系的旋转方向,是一个3x3的矩阵。
18、进一步,在所述步骤s1中,
19、系的广义运动速度可定义为:
20、 其中,分别为系运动的线速度和角速度 。
21、进一步,在所述步骤s1中,
22、系的广义运动速度和机器人关节速度之间的映射由下式给出:
23、
24、其中,为坐标系的雅克比矩阵。
25、进一步,在所述步骤s2中,
26、
27、其中,和分别为操作对象上左右两个力传感器,基于各自坐标系所测得的力旋量,矩阵定义如下:
28、
29、其中, 表示反对称矩阵映射;s(p)是向量p=(p1,p2,p3)所对应的3x3的反对称矩阵,s(p)=(0,-p3,p2;p3,0,-p1;-p2,p1,0)。
30、进一步,在所述步骤s4中,所述计算针对大惯量物体的变导纳控制律,包括:
31、将和代入到,得到变导纳控制率。
32、根据本发明实施例的用于操作大惯性物体的机器人变导纳控制方法,提供针对人-机协作对象为大惯量物体时的变导纳控制,并以人-机功率传递为角度进行变导纳策略设计。本发明从人机之间的功率传递角度入手,实现了在工业环境下,对大惯量物体进行人机协作的变导纳控制,可以显著减少人的工作。本发明可以最大限度减少传统变导纳控制在操纵大惯量物体时所产生的意外超调和振荡,提高人对任务的控制感。
33、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种用于操作大惯性物体的机器人变导纳控制方法,其特征在于,包括如下步骤:
2.如权利要求1所述的用于操作大惯性物体的机器人变导纳控制方法,其特征在于,在所述步骤s1中,广义姿态包括位置向量和方向矩阵,其中;pi是一个位置向量,也就是相对于参考坐标系原点的x、y、z方向上的位移,是一个3x1的矩阵;方向矩阵是一个旋转矩阵,相对于参考坐标系的旋转方向,是一个3x3的矩阵。
3.如权利要求1所述的用于操作大惯性物体的机器人变导纳控制方法,其特征在于,在所述步骤s1中,
4.如权利要求1所述的用于操作大惯性物体的机器人变导纳控制方法,其特征在于,在所述步骤s1中,
5.如权利要求1所述的用于操作大惯性物体的机器人变导纳控制方法,其特征在于,在所述步骤s2中,
6.如权利要求1所述的用于操作大惯性物体的机器人变导纳控制方法,其特征在于,在所述步骤s4中,所述计算针对大惯量物体的变导纳控制律,包括:
技术总结
本发明提出了一种用于操作大惯性物体的机器人变导纳控制方法,包括:定义多个坐标系,包括:定义系为以机器人底座为原点的世界坐标系,系以操作物体质心为原点的物体坐标系,系和系分别放置在物体左右手柄的力/扭矩传感器处;定义目标阻抗模型;设计并计算目标惯性矩阵和阻尼矩阵;根据目标惯性矩阵和阻尼矩阵,计算针对大惯量物体的变导纳控制律。
技术研发人员:王珂,庹华,韩峰涛,张航,张天石,马建涛,于文进
受保护的技术使用者:珞石(北京)科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!