工业机器人奇异点规避方法、装置及拖动示教系统与流程
本发明主要涉及工业机器人,尤其涉及一种工业机器人奇异点规避方法、装置及拖动示教系统。
背景技术:
1、大部分6轴关节型机器人,由于机械限位或软限位的限制,在其运动空间中会出现逆运动学无解的情况,也就是基于坐标的规划运动无法明确地逆向转化为机器人各个关节轴的旋转角度。在机器人工作空间中这些逆运动学无解的点就被称为“奇异点”。
2、在工业机器人领域,工作空间的拖动示教可以替代离线编程示教方式完成指定位置和特定轨迹的移动,并记录位姿数据,减少离线编程从而提高效率。在工业机器人的作业空间拖动示教过程中,若接近奇异点位置,则需要停止示教模式。通过控制机器人跨过奇异点之后,再重新进入拖动示教模式,这样拖动示教的过程效率会大打折扣。另一种方式就是限制工作空间,虽然这种限制工作空间的方式可以避开奇异点问题,但这样并不能满足所有工作空间内的作业。
3、因此,亟需一种工业机器人奇异点规避方法、装置及拖动示教系统,从而实现在作业空间内可自由拖动示教。
技术实现思路
1、本发明要解决的技术问题是提供一种工业机器人奇异点规避方法、装置及拖动示教系统,解决机器人遇到奇异点时无法求解出期望关节角的问题。
2、为解决上述技术问题,本发明提供了另一种工业机器人奇异点规避方法,包括:
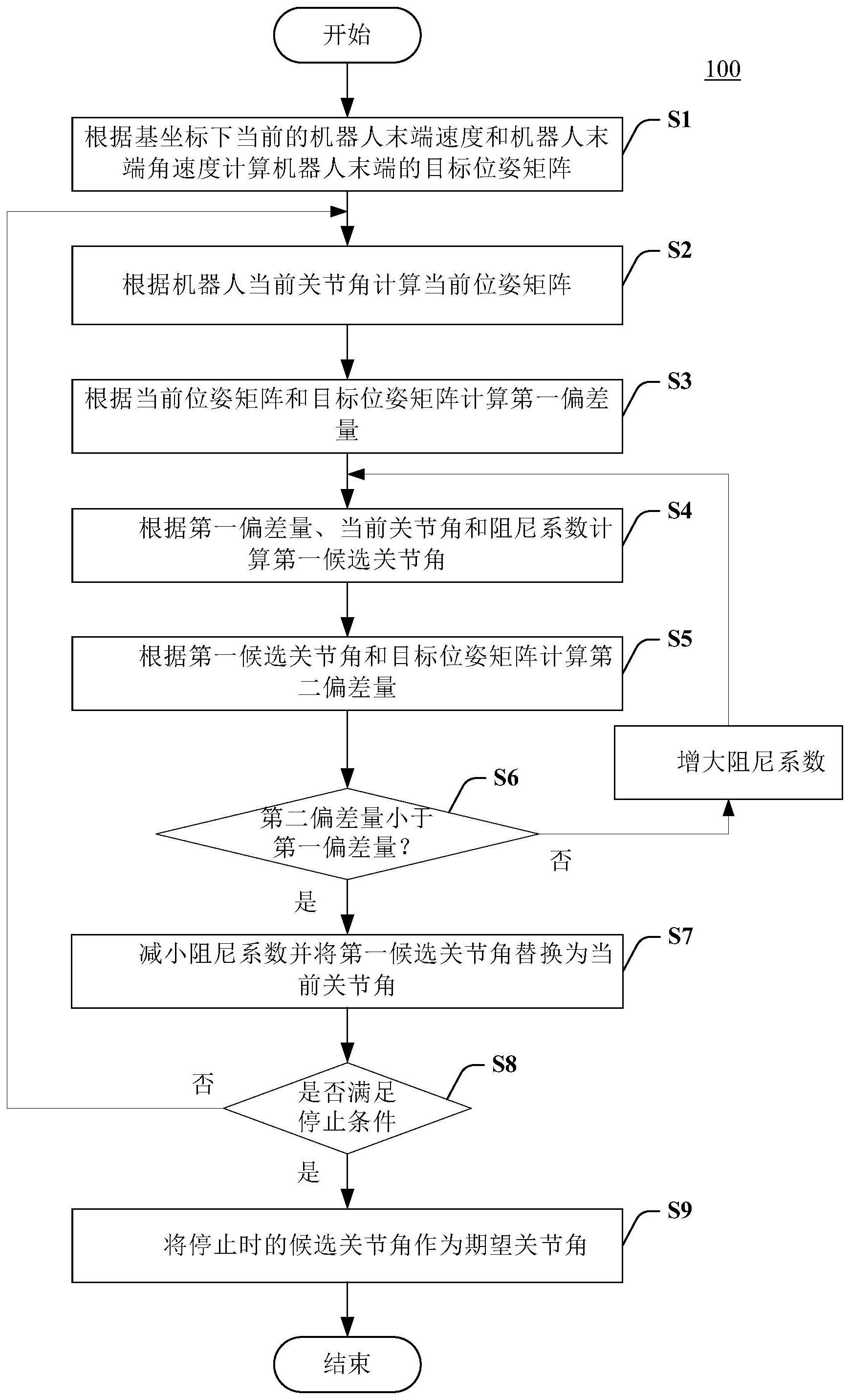
3、步骤s1:根据基坐标下当前的机器人末端速度和机器人末端角速度计算机器人末端的目标位姿矩阵;
4、步骤s2:根据机器人当前关节角计算当前位姿矩阵;
5、步骤s3:根据所述当前位姿矩阵和所述目标位姿矩阵计算第一偏差量;
6、步骤s4:根据所述第一偏差量、所述当前关节角和阻尼系数计算第一候选关节角;
7、步骤s5:根据所述第一候选关节角和所述目标位姿矩阵计算第二偏差量;
8、步骤s6:判断所述第二偏差量是否小于所述第一偏差量,如果是,则进入步骤s7,如果否,则增大阻尼系数并重复执行步骤s4~s6;
9、步骤s7:减小阻尼系数并将所述第一候选关节角替换为所述当前关节角;
10、步骤s8:判断是否满足停止条件,如果是,则进入步骤s9;如果否,则重复执行步骤s2~s8;
11、步骤s9:将停止时的候选关节角作为期望关节角。
12、为解决上述技术问题,本发明提供了一种工业机器人奇异点规避方法,包括:根据机器人当前时刻各关节的关节角度和连杆偏距确定奇异参数,所述奇异参数包括肩关节奇异参数、肘关节奇异参数和腕关节奇异参数;判断所述奇异参数是否位于奇异区域,如果是,采用近似参数替换所述奇异参数,根据所述机器人末端速度、所述机器人末端角速度和所述近似参数计算前三轴关节速度和后三轴关节速度;如果否,根据所述机器人末端速度、所述机器人末端角速度和所述奇异参数计算前三轴关节速度和后三轴关节速度;对所述前三轴关节速度和所述后三轴关节速度进行积分得到期望关节角。
13、可选地,采用近似参数替换所述奇异参数包括:采用替换其中ki为第i个奇异参数,λi表示第i个阻尼系数,i=1,2,3。
14、为解决上述技术问题,本发明提供了一种机器人拖动示教系统,包括:力传感器,用于采集力数据;数据处理模块,用于对所述力数据进行处理获得末端力,所述处理包括重力及负载补偿处理;导纳模块,用于根据所述末端力计算出机器人末端速度和机器人末端角速度;奇异点规避模块,配置为执行如上所述的工业机器人奇异点规避方法计算出期望关节角;伺服模块,用于根据所述期望关节角控制机器人运动到示教位置。
15、可选地,系统还包括:超速和限位保护模块,用于对所述期望关节角进行超速保护处理和限位保护处理,得到最终给定关节角;其中,所述伺服模块还用于根据所述最终给定关节角控制机器人运动到示教位置。
16、为解决上述技术问题,本发明提供了一种工业机器人奇异点规避装置,包括:存储器,用于存储可由处理器执行的指令;处理器,用于执行所述指令以实现如上所述的方法。
17、为解决上述技术问题,本发明提供了一种存储有计算机程序代码的计算机可读介质,所述计算机程序代码在由处理器执行时实现如上所述的方法。
18、与现有技术相比,本发明具有以下优点:
19、本发明的一种工业机器人奇异点规避方法通过增大或减小阻尼系数调节关节角增量,使得候选关节角的位姿与目标位姿矩阵接近,从而获得避开奇异点的期望关节角。
20、本发明的另一种工业机器人奇异点规避方法通过机器人末端速度、机器人末端角速度和奇异参数计算前三轴关节速度和后三轴关节速度,对位于奇异区域的奇异参数采用近似参数进行替换,从而获得避开奇异点的期望关节角。
21、另外,本发明的机器人拖动示教系统通过奇异点规避模块执行工业机器人奇异点规避方法获得避开奇异点的期望关节角,可以使得工业机器人在示教时避开奇异点,从而不需要停下示教或限制空间,实现在作业空间内自由拖动示教。
技术特征:
1.一种工业机器人奇异点规避方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,步骤s3包括:
3.如权利要求1所述的方法,其特征在于,步骤s4包括:
4.如权利要求3所述的方法,其特征在于,步骤s41包括:
5.如权利要求4所述的方法,其特征在于,通过如下公式计算所述关节角增量:
6.如权利要求5所述的方法,其特征在于,还包括:
7.如权利要求1所述的方法,其特征在于,判断是否满足停止条件包括:判断循环次数是否达到预设次数,如果是,则满足停止条件。
8.如权利要求1所述的方法,其特征在于,判断是否满足停止条件包括:判断所述第二偏差量是否小于等于误差容许范围,如果是,则满足停止条件。
9.一种工业机器人奇异点规避方法,其特征在于,包括:
10.如权利要求9所述的方法,其特征在于,采用近似参数替换所述奇异参数包括:采用替换其中ki为第i个奇异参数,λi表示第i个阻尼系数,i=1,2,3。
11.如权利要求10所述的方法,其特征在于,通过如下公式计算阻尼系数λi:
12.如权利要求9所述的方法,其特征在于,根据所述机器人末端速度、所述机器人末端角速度和所述奇异参数计算前三轴关节速度和后三轴关节速度包括:
13.如权利要求12所述的方法,其特征在于,通过如下公式计算所述前三轴关节速度:
14.如权利要求13所述的方法,其特征在于,通过如下公式计算所述后三轴关节速度:
15.一种机器人拖动示教系统,其特征在于,包括:
16.如权利要求15所述的系统,其特征在于,还包括:
17.一种工业机器人奇异点规避装置,其特征在于,包括:
18.一种存储有计算机程序代码的计算机可读介质,所述计算机程序代码在由处理器执行时实现如权利要求1-14任一项所述的方法。
技术总结
本发明提供了一种工业机器人奇异点规避方法、装置及拖动示教系统,解决机器人遇到奇异点时无法求解出期望关节角的问题。方法包括:步骤S1:计算机器人末端的目标位姿矩阵;步骤S2:根据机器人当前关节角计算当前位姿矩阵;步骤S3:根据当前位姿矩阵和目标位姿矩阵计算第一偏差量;步骤S4:根据第一偏差量、当前关节角和阻尼系数计算第一候选关节角;步骤S5:根据第一候选关节角和目标位姿矩阵计算第二偏差量;步骤S6:判断第二偏差量是否小于第一偏差量,如果是,进入步骤S7;步骤S7:减小阻尼系数并将第一候选关节角替换为当前关节角;步骤S8:判断是否满足停止条件,如果是,将停止时的候选关节角作为期望关节角。
技术研发人员:李栋,李睿钦,钱进,王乾
受保护的技术使用者:实时侠智能控制技术有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!