一种六自由度单轨吊机械手的制作方法
本发明涉及煤矿井,具体而言,涉及一种六自由度单轨吊机械手。
背景技术:
1、随着煤矿井下机械化程度的不断发展,对煤矿井下辅助运输设备的要求也越来越高。通过近十年的发展,辅助运输设备形成了多样化的运输模式,其中单轨吊成为辅助运输中必不可少的一种运输方式。
2、在煤矿井下单轨吊的使用过程中,单轨吊的配套设备成为单轨吊产品能够适应多种环境的一种必要东西,现有的单轨吊的配套设备不便在一定空间范围内进行复杂性的货物搬运和挪移。
3、参照现有公开号为cn107473142a的专利公开了一种基于单轨吊的机械手,属于机械领域,主要应用于煤矿井下设备搬运,它包括单轨吊、机械手,其特征是单轨吊与机械手之间采用五轴联动,实现机械手在空间范围内的灵活动作;采用液压伺服系统,控制机械手的大负载动作。
4、上述的这种基于单轨吊的机械手,基于单轨吊系统,运行于单轨轨道上,工作过程中不影响地面其它工作的正常运行;采用从上到下的抓取方式,能够在空间范围内实现最大的灵活度;通过液压系统来驱动,在灵活的同时,还能保证大负载动作。但是上述的这种基于单轨吊的机械手依旧存在着一些缺点,如:采用从上到下的抓取方式,机械手在空间范围内的动作不够灵活,不便对角度进行抓取使用。
技术实现思路
1、为了弥补以上不足,本发明提供了一种六自由度单轨吊机械手,旨在改善现有的单轨吊的配套设备不便在一定空间范围内进行复杂性的货物搬运和挪移,机械手在空间范围内的动作不够灵活,不便对角度进行抓取使用的问题。
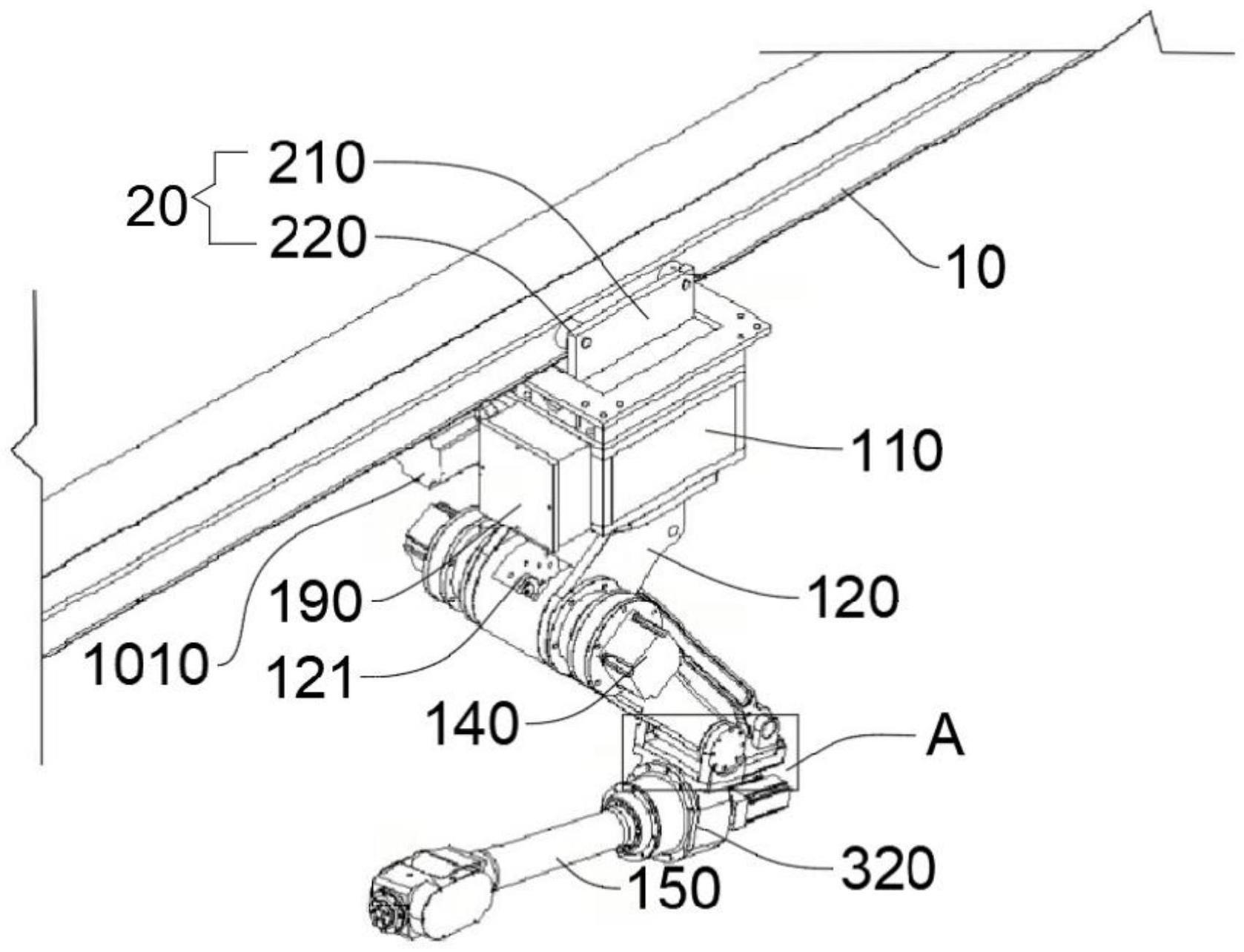
2、本发明实施例提供了一种六自由度单轨吊机械手,包括工字钢轨道,所述工字钢轨道上设有移动机构,所述移动机构上连接有底座,所述底座下端连接有旋转座,所述旋转座连接有机械大臂,所述旋转底座连与所述机械大臂连接处两侧安装有第一防爆电机,所述机械大臂另一端通过连接机构连接有机械小臂,所述机械大臂与所述机械小臂一侧连接有调节机构,所述连接机构一端安装有第二防爆电机和第三防爆电机,所述机械小臂另一端安装有腕部。
3、在上述实现过程中,通过移动机构的设置,可抓取物品后,带动物品进行水平移动搬运,通过旋转座的设置,可以旋转对物品进行抓取,通过第一防爆电机的设置,可带动机械大臂进行旋转调节,通过液压缸的设置,可带动机械小臂进行角度调节,且可控制机械手的大负载动作,通过第三防爆电机的设置,可带动腕部进行旋转,便于腕部将物品连接抓取,采用六轴联动,实现机械手在空间范围内的灵活动作,工作空间范围大,可以很灵活的绕过障碍物,并且结构紧凑,占地面积也比较小。
4、在一种具体的实施方案中,所述移动机构包括车轮架,所述车轮架两侧安装有若干车轮,若干所述车轮滑动连接在所述工字钢轨道两侧。
5、在上述实现过程中,通过若干车轮,便于带动车轮架在工字钢轨道上移动,通过车轮架的设置,便于与底座连接。
6、在一种具体的实施方案中,所述底座上安装有列车连接牵引装置,所述列车连接牵引装置一侧安装有机身旋转电机。
7、在上述实现过程中,通过列车连接牵引装置便于车轮架在工字钢轨道上移动,通过机身旋转电机的设置,便于装置进行水平旋转调节。
8、在一种具体的实施方案中,所述旋转座一端开设有第一连接槽,所述机械大臂通过两所述第一防爆电机一端卡合连接在所述第一连接槽内。
9、在上述实现过程中,通过第一连接槽的设置,便于机械大臂与旋转座连接。
10、在一种具体的实施方案中,所述连接机构包括连接架和连接部,所述连接架焊接在所述连接部一侧,所述连接架上开设有第二连接槽,所述机械大臂另一端卡合在所述第二连接槽内,所述机械大臂另一端通过第一销杆与所述连接架连接。
11、在上述实现过程中,通过连接机构的设置,便于机械大臂与机械小臂铰接。
12、在一种具体的实施方案中,所述调节机构包括液压缸,所述机械大臂一端焊接有第一固定块,所述连接架一侧焊接有连接板,所述连接板上焊接有第二固定块,所述液压缸两端分别与所述第一固定块和所述第二固定块通过第二销杆连接。
13、在上述实现过程中,通过液压缸的设置,可带动机械小臂进行竖直旋转,可控制机械手的大负载动作。
14、在一种具体的实施方案中,所述机械小臂旋转连接在所述连接部一端,所述第二防爆电机与所述机械小臂连接。
15、在上述实现过程中,第二防爆电机可带动机械小臂进行旋转。
16、在一种具体的实施方案中,所述腕部与所述机械小臂一端旋转连接,所述第三防爆电机与所述腕部连接。
17、在上述实现过程中,第三防爆电机可带动腕部进行旋转调节,从而便于腕部将物品抓取调节。
18、一种六自由度单轨吊机械手的使用方法,包括有以下步骤:
19、s1:横向移动调节:车轮滑动连接在工字钢轨道两侧,通过列车连接牵引装置可带动车轮架在工字钢轨道上移动,可带动装置进行横向移动调节;
20、s2:机械大臂调节:机身旋转电机带动旋转座进行旋转,从而可以旋转对物品进行抓取,第一防爆电机可带动机械大臂进行旋转,完成大臂的调节;
21、s3:机械小臂调节:液压缸可带动机械小臂进行角度调节,第二防爆电机带动机械小臂进行旋转,可完成机械小臂的调节,其中通过液压缸的设置,可控制机械手的大负载动作;
22、s4:机械臂对物品进行搬运:第三防爆电机带动腕部旋转,便于将物品运输抓取,通过s1、s2和s3的步骤调节,采用六轴联动可实现机械手在空间范围内的灵活动作。
23、与现有技术相比,本发明的有益效果:通过移动机构的设置,可抓取物品后,带动物品进行水平移动搬运,通过旋转座的设置,可以旋转对物品进行抓取,通过第一防爆电机的设置,可带动机械大臂进行旋转调节,通过液压缸的设置,可带动机械小臂进行角度调节,且可控制机械手的大负载动作,通过第三防爆电机的设置,可带动腕部进行旋转,便于腕部将物品连接抓取,采用六轴联动,实现机械手在空间范围内的灵活动作,工作空间范围大,可以很灵活的绕过障碍物,并且结构紧凑,占地面积也比较小。
技术特征:
1.一种六自由度单轨吊机械手,包括工字钢轨道(10),其特征在于,所述工字钢轨道(10)上设有移动机构(20),所述移动机构(20)上连接有底座(110),所述底座(110)下端连接有旋转座(120),所述旋转座(120)连接有机械大臂(130),所述旋转底座(110)连与所述机械大臂(130)连接处两侧安装有第一防爆电机(140),所述机械大臂(130)另一端通过连接机构(30)连接有机械小臂(150),所述机械大臂(130)与所述机械小臂(150)一侧连接有调节机构(40),所述连接机构(30)一端安装有第二防爆电机(160)和第三防爆电机(170),所述机械小臂(150)另一端安装有腕部(180)。
2.根据权利要求1所述的一种六自由度单轨吊机械手,其特征在于,所述移动机构(20)包括车轮架(210),所述车轮架(210)两侧安装有若干车轮(220),若干所述车轮(220)滑动连接在所述工字钢轨道(10)两侧。
3.根据权利要求1所述的一种六自由度单轨吊机械手,其特征在于,所述底座(110)上安装有列车连接牵引装置(190),所述列车连接牵引装置(190)一侧安装有机身旋转电机(1010)。
4.根据权利要求1所述的一种六自由度单轨吊机械手,其特征在于,所述旋转座(120)一端开设有第一连接槽(121),所述机械大臂(130)通过两所述第一防爆电机(140)一端卡合连接在所述第一连接槽(121)内。
5.根据权利要求1所述的一种六自由度单轨吊机械手,其特征在于,所述连接机构(30)包括连接架(310)和连接部(320),所述连接架(310)焊接在所述连接部(320)一侧,所述连接架(310)上开设有第二连接槽(311),所述机械大臂(130)另一端卡合在所述第二连接槽(311)内,所述机械大臂(130)另一端通过第一销杆(330)与所述连接架(310)连接。
6.根据权利要求5所述的一种六自由度单轨吊机械手,其特征在于,所述调节机构(40)包括液压缸(410),所述机械大臂(130)一端焊接有第一固定块(420),所述连接架(310)一侧焊接有连接板(430),所述连接板(430)上焊接有第二固定块(440),所述液压缸(410)两端分别与所述第一固定块(420)和所述第二固定块(440)通过第二销杆(450)连接。
7.根据权利要求1所述的一种六自由度单轨吊机械手,其特征在于,所述机械小臂(150)旋转连接在所述连接部(320)一端,所述第二防爆电机(160)与所述机械小臂(150)连接。
8.根据权利要求1所述的一种六自由度单轨吊机械手,其特征在于,所述腕部(180)与所述机械小臂(150)一端旋转连接,所述第三防爆电机(170)与所述腕部(180)连接。
9.一种六自由度单轨吊机械手的使用方法,包括有以下步骤:
技术总结
本发明提供了一种六自由度单轨吊机械手,包括工字钢轨道,所述工字钢轨道上设有移动机构,所述移动机构上连接有底座,所述底座下端连接有旋转座,所述旋转座连接有机械大臂,所述旋转底座连与所述机械大臂连接处两侧安装有第一防爆电机,所述机械大臂另一端通过连接机构连接有机械小臂,所述机械大臂与所述机械小臂一侧连接有调节机构,所述连接机构一端安装有第二防爆电机和第三防爆电机,所述机械小臂另一端安装有腕部,本发明采用六轴联动,实现机械手在空间范围内的灵活动作,工作空间范围大,可以很灵活的绕过障碍物,并且结构紧凑,占地面积也比较小。
技术研发人员:何登云,徐乃忠,苏畅,庞东旭,王传峰,朱缪和,杨龙飞
受保护的技术使用者:淮北矿业股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!