一种高强度高精度机械手的制作方法
本发明涉及机械手,特别涉及一种高强度高精度机械手。
背景技术:
1、工业机械手是近几十年发展起来的一种高科技自动化生产设备,是工业机器人的一个重要分支,它可以代替之前的人工操作,减轻企业对用工的依赖性,降低生产成本,很好的提高生产效率,实现工业自动化,目前市面上出现的机械手,仍存在各种各样的不足,不能够满足生产生活的需求。
2、例如,专利cn205272030u(申请号:201521130924.x)公开了一种高精度机械手,通过设置的第一齿轮和第二齿轮的啮合传动,使得卡爪同时进行开合运动,夹持定位精度高,金属杆与第一齿轮和第二齿轮均为一体式设置,维修难度大大降低。但是专利cn205272030u所公开的高精度机械手通过齿轮啮合传动控制卡爪开合,齿轮之间具有较大间隙,难以根据待夹持物品尺寸精确调节机械手开合度,机械手夹持精度低,同时机械手高强度运转时,齿轮之间易产生磨损或故障,对机械手造成损害,造成机械手夹持精度低,工作寿命短。
技术实现思路
1、因此,本发明要解决现有技术中机械手夹持精度低,工作寿命短的问题。
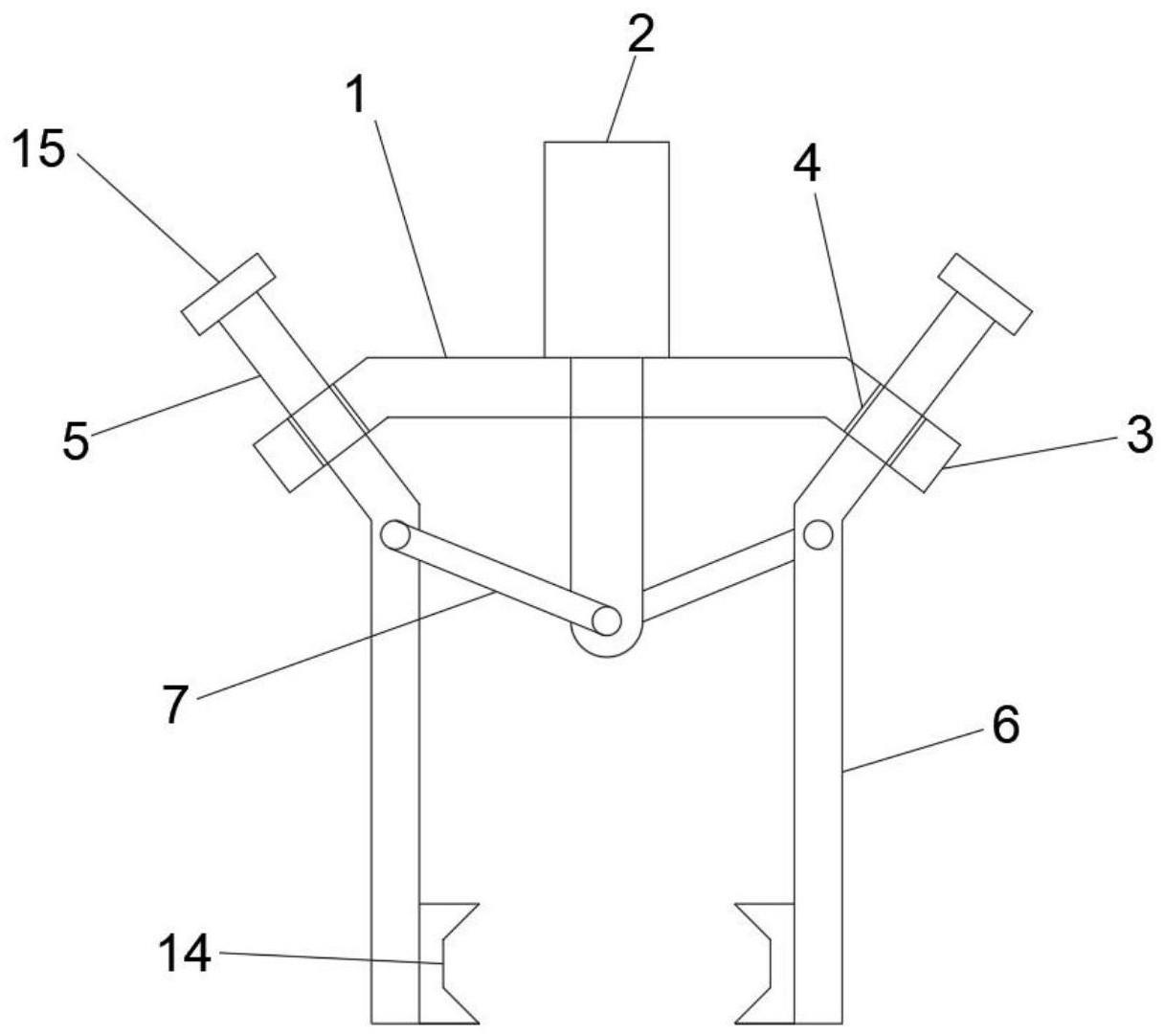
2、为此,采用的技术方案是,本发明提供一种高强度高精度机械手,包括:安装杆、电缸,安装杆两端分别倾斜设置有限位杆,安装杆一侧壁上设置有电缸,电缸活塞杆穿过安装杆分别与两个连杆一端转动连接,限位杆上设置有限位孔,限位孔内活动设置有移动杆,电缸活塞杆两侧分别设置有夹持杆,夹持杆一端与同侧移动杆连接,连杆另一端与同侧夹持杆转动连接。
3、优选的,还包括底座,底座顶端设置有驱动关节,驱动关节一侧连接有第一机械臂,第一机械臂自由端通过第一关节连接有第二机械臂,第二机械臂自由端通过第二关节与电缸连接。
4、优选的,两个夹持杆底端相互靠近的一侧壁上分别设置有卡爪。
5、优选的,移动杆远离夹持杆的一端设置有限位板。
6、优选的,底座顶端设置有凹槽,驱动关节位于凹槽内,并与凹槽相匹配,底座内设置有空腔,凹槽与空腔之间通过通孔连通。
7、优选的,空腔底端内壁上设置有驱动电机,驱动电机的输出轴朝上设置有主动齿轮,驱动电机一侧设置有竖直方向的转动轴,转动轴底端与空腔底端内壁转动连接,转动轴安装有与主动齿轮相互啮合的从动齿轮,从动齿轮顶端设置有支承座,支承座顶端穿过通孔与驱动关节连接。
8、优选的,底座一侧壁上设置有与空腔连通的散热口,散热口内设置有过滤网。
9、优选的,空腔内设置有散热组件,散热组件包括:
10、双输出轴电机,空腔底端内壁上设置有竖直方向的固定杆,固定杆顶端设置有双输出轴电机,双输出轴电机远离散热口的一端输出轴设置有风扇,双输出轴电机靠近散热口的一端输出轴偏心设置有三角板,三角板端面设置有第一滑块;
11、滑槽体,空腔底端内壁上设置有滑槽体,滑槽体内滑动设置有第二滑块,第二滑块一侧顶端与y型架一端转动连接,y型架内设置有三角板,第二滑块顶端中间处设置有竖直方向的导向杆,导向杆上设置有沿轴向延伸的导向槽,第一滑块能够在导向槽内往复移动,导向杆靠近散热口的一侧壁上设置有与过滤网相接触的第一刷毛。
12、优选的,第一滑块靠近散热口的一侧壁上设置有与过滤网相接触的碰撞头,y型架两侧边框靠近散热口的一侧壁上分别设置有风板,y型架靠近导向杆的一侧底端设置有撞击杆。
13、优选的,空腔内设置有润滑组件,润滑组件包括:
14、环形齿轮,通孔外周向间隔设置有若干连接杆,连接杆顶端与空腔顶端内壁连接,连接杆底端滑动设置有环形齿轮,环形齿轮底端间隔设置有若干齿牙,环形齿轮一侧设置有电机,电机的输出轴朝下设置有与环形齿轮相互啮合的第一齿轮;
15、转筒,环形齿轮上间隔套设有若干转筒,转筒内壁上均布有若干斜螺纹,斜螺纹与齿牙相互啮合,转筒内设置有环形储液腔,转筒周向外壁上间隔设置有若干与储液腔连通的输液管,输液管上设置有驱动泵,输液管上连通有喷头,转筒周向外壁上均布有若干第二刷毛。
16、本发明技术方案具有以下优点:
17、本发明通过驱动关节与机械臂驱动机械手,能根据生产需要随时调节机械手的位置,方便转移夹持物品,使用方便;通过电缸驱动连杆摆动控制夹持杆开合,机械手传动方便,高强度、长时间使用过程中对机械手的损耗小,机械手不易产生故障,同时通过电缸直接控制夹持杆的间距,控制精度高,调节方便,提高了机械手的夹持精度和强度,提高机械手的使用寿命,结构简单,可靠性高,使用方便。
18、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
19、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种高强度高精度机械手,其特征在于,包括:安装杆(1)、电缸(2),安装杆(1)两端分别倾斜设置有限位杆(3),安装杆(1)一侧壁上设置有电缸(2),电缸(2)活塞杆穿过安装杆(1)分别与两个连杆(7)一端转动连接,限位杆(3)上设置有限位孔(4),限位孔(4)内活动设置有移动杆(5),电缸(2)活塞杆两侧分别设置有夹持杆(6),夹持杆(6)一端与同侧移动杆(5)连接,连杆(7)另一端与同侧夹持杆(6)转动连接。
2.如权利要求1所述的一种高强度高精度机械手,其特征在于,还包括底座(8),底座(8)顶端设置有驱动关节(9),驱动关节(9)一侧连接有第一机械臂(10),第一机械臂(10)自由端通过第一关节(11)连接有第二机械臂(12),第二机械臂(12)自由端通过第二关节(13)与电缸(2)连接。
3.如权利要求1所述的一种高强度高精度机械手,其特征在于,两个夹持杆(6)底端相互靠近的一侧壁上分别设置有卡爪(14)。
4.如权利要求1所述的一种高强度高精度机械手,其特征在于,移动杆(5)远离夹持杆(6)的一端设置有限位板(15)。
5.如权利要求2所述的一种高强度高精度机械手,其特征在于,底座(8)顶端设置有凹槽(16),驱动关节(9)位于凹槽(16)内,并与凹槽(16)相匹配,底座(8)内设置有空腔(17),凹槽(16)与空腔(17)之间通过通孔(23)连通。
6.如权利要求5所述的一种高强度高精度机械手,其特征在于,空腔(17)底端内壁上设置有驱动电机(18),驱动电机(18)的输出轴朝上设置有主动齿轮(19),驱动电机(18)一侧设置有竖直方向的转动轴(20),转动轴(20)底端与空腔(17)底端内壁转动连接,转动轴(20)安装有与主动齿轮(19)相互啮合的从动齿轮(21),从动齿轮(21)顶端设置有支承座(22),支承座(22)顶端穿过通孔(23)与驱动关节(9)连接。
7.如权利要求5所述的一种高强度高精度机械手,其特征在于,底座(8)一侧壁上设置有与空腔(17)连通的散热口(24),散热口(24)内设置有过滤网(25)。
8.如权利要求7所述的一种高强度高精度机械手,其特征在于,空腔(17)内设置有散热组件,散热组件包括:
9.如权利要求8所述的一种高强度高精度机械手,其特征在于,第一滑块(29)靠近散热口(24)的一侧壁上设置有与过滤网(25)相接触的碰撞头(36),y型架(32)两侧边框靠近散热口(24)的一侧壁上分别设置有风板(37),y型架(32)靠近导向杆(33)的一侧底端设置有撞击杆(38)。
10.如权利要求5所述的一种高强度高精度机械手,其特征在于,空腔(17)内设置有润滑组件,润滑组件包括:
技术总结
本发明公开了一种高强度高精度机械手,包括:安装杆、电缸,安装杆两端分别倾斜设置有限位杆,安装杆一侧壁上设置有电缸,电缸活塞杆穿过安装杆分别与两个连杆一端转动连接,限位杆上设置有限位孔,限位孔内活动设置有移动杆,电缸活塞杆两侧分别设置有夹持杆,夹持杆一端与同侧移动杆连接,连杆另一端与同侧夹持杆转动连接。本发明的目的在于提供一种夹持精度高、使用方便的高强度高精度机械手。
技术研发人员:王浩
受保护的技术使用者:江西瑞奇尔机械制造有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!