屋顶分布式光伏清洗机器人及其控制方法与流程
本发明涉及屋顶分布式光伏的清洗,特别是涉及可对光伏板的组件进行清洗的设备及其控制方法。
背景技术:
1、随着屋顶分布式光伏市场装机规模逐年增加,光伏板组件表面灰尘污物清洗需求随之上升。目前主要采取人工清洗,以及单行清洗设备清洗,或单行清洗设备配合一台摆渡车清洗。
2、单行清洗设备配合一台摆渡车清洗,可以实现一机多行清洗,但两台设备联动故障率也增加,而且使得太阳能电站的清洗设备装机成本、运营成本偏高,但智能化清洗程度并不高。
3、现有的这些清洗设备通常采用直流电机控制,在组件表面行走时会出现倾斜的状态,即使在清洗设备上设置导向结构进行机械纠偏,也还会存在导向不够精准的问题,出现设备卡死的情况,容易出现故障。在实现多行组件跨行清洗时,这种问题尤为凸显,还会带来换行时运行不畅、运行定位准确性欠佳等问题。
技术实现思路
1、发明目的:本发明的目的是提供一种屋顶分布式光伏清洗机器人,同时提供了对其的控制方法,运行顺畅,改善倾斜纠偏等状况,可实现单设备自主跨行运动进行跨行清洗。
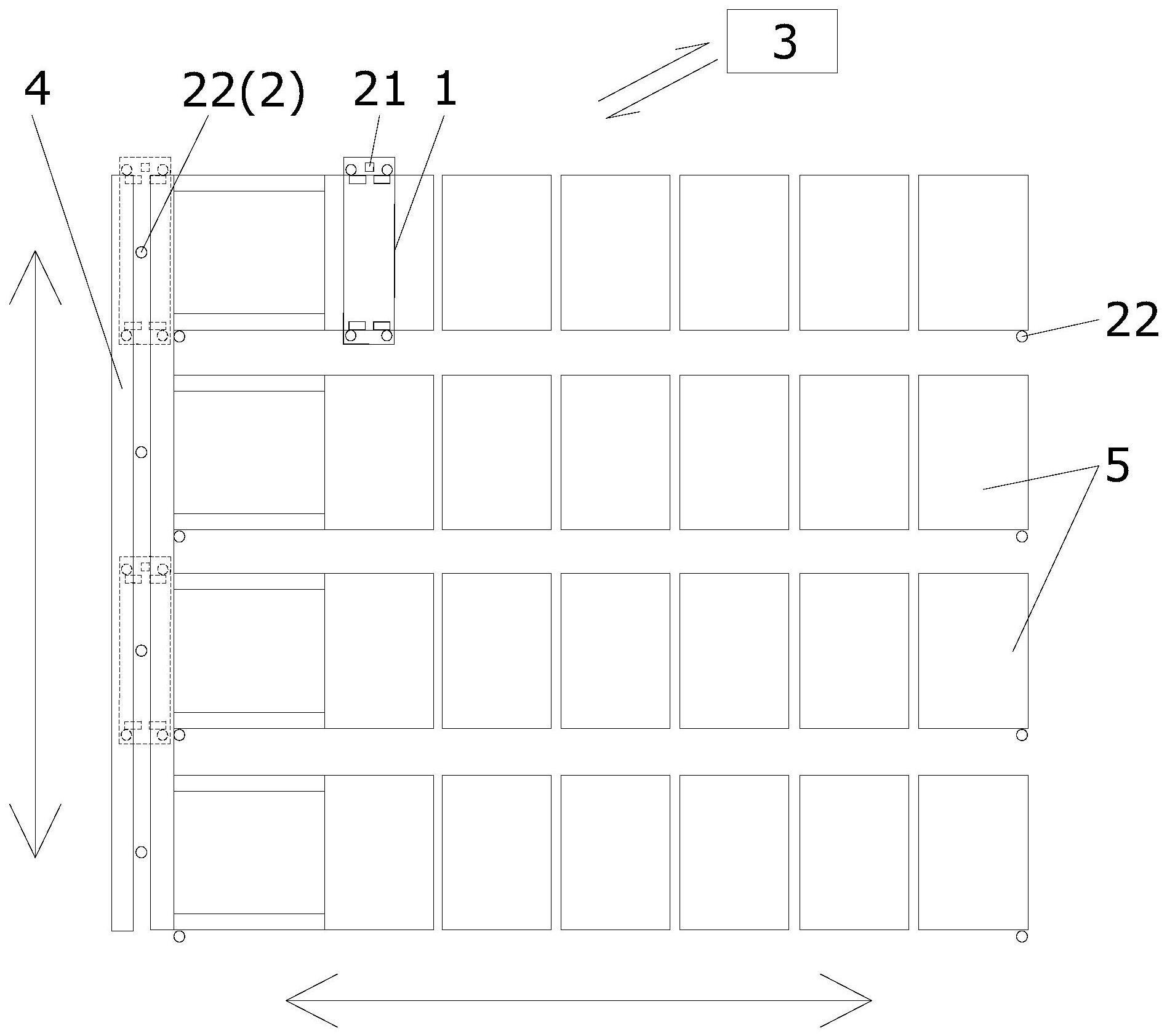
2、技术方案:一种屋顶分布式光伏清洗机器人,包括机器人本体、定位系统、电控系统,所述机器人本体长度方向垂直于组件的多行平行方向设置,所述机器人本体上设置有四个驱动轮并呈四角分布,所述机器人本体通过所述驱动轮在组件表面接触行走,四个所述驱动轮上分别设置倾角传感器、分别通过电机驱动,所述定位系统包括rfid传感器和若干的rfid标签,所述rfid传感器安装在所述机器人本体上,所述rfid标签提供定位标签,设置在每行组件的运行末端,所述电控系统包括存储模块、倾角获取模块、电机控制模块,所述电控系统关联所述驱动轮和所述定位系统,控制所述机器人本体自动化运行。
3、进一步的,还包括换行轨道,所述换行轨道以垂直于组件的多行平行方向设置,所述机器人本体在所述换行轨道上移动,以在组件的多行平行方向之间换行,所述rfid标签还设置在所述换行轨道上与每行组件位置对应处。
4、最佳的,所述换行轨道设置在组件的边框处,机器人本体进行单行清洗时,只需从换行轨道一侧进行一次上、下通行即可。
5、一种上述的屋顶分布式光伏清洗机器人的控制方法,对机器人本体进行以下控制:
6、运行换向控制:通过设置在机器人本体上的rfid传感器,与提供定位标签的rfid标签进行识别定位,控制机器人本体在组件上进行左移、右移、前移、后移的四向运动;
7、倾斜纠偏控制:通过设置在驱动轮上的倾角传感器,采集当前角度值,与设定的正常角度值进行对比,感应机器人本体运动过程中发生的倾斜,进行纠偏运动分析,调节各驱动轮的电机差速运动,进行位姿纠正,使机器人本体处于接近垂直组件方阵的状态;
8、卡死解除控制:通过设置在驱动轮上的倾角传感器,采集当前角度值,与设定的卡死角度值的方向进行对比,判断机器人本体是否发生未接收停止命令的停止,进行卡死运动分析,调节各驱动轮的电机差速运动,进行位姿纠正,使机器人本体解除卡死越过障碍。
9、进一步的,卡死解除控制中调节各驱动轮的电机差速运动,指:调节卡死的驱动轮其电机停止运转,其他驱动轮的电机进行运动,使机器人本体后退和位姿纠偏。
10、有益效果:本发明的优点是:对于屋顶分布式光伏单行及自主跨行清洗的设备控制,实现了精准、定向的运行定位,设备可进行左移、右移、前移、后移的四向运动,可实时及时纠偏倾斜,始终处于接近垂直组件方阵的状态,发现和解除运行中的卡死,越过组件障碍,保证运行可靠性。
技术特征:
1.一种屋顶分布式光伏清洗机器人,其特征在于:包括机器人本体(1)、定位系统(2)、电控系统(3),所述机器人本体(1)长度方向垂直于组件的多行平行方向设置,所述机器人本体(1)上设置有四个驱动轮(11)并呈四角分布,所述机器人本体(1)通过所述驱动轮(11)在组件表面接触行走,四个所述驱动轮(11)上分别设置倾角传感器、分别通过电机驱动,所述定位系统(2)包括rfid传感器(21)和若干的rfid标签(22),所述rfid传感器(21)安装在所述机器人本体(1)上,所述rfid标签(22)提供定位标签,设置在每行组件的运行末端,所述电控系统(3)包括存储模块、倾角获取模块、电机控制模块,所述电控系统(3)关联所述驱动轮(11)和所述定位系统(2),控制所述机器人本体(1)自动化运行。
2.根据权利要求1所述的屋顶分布式光伏清洗机器人,其特征在于:还包括换行轨道(4),所述换行轨道(4)以垂直于组件的多行平行方向设置,所述机器人本体(1)在所述换行轨道(4)上移动,以在组件的多行平行方向之间换行,所述rfid标签(22)还设置在所述换行轨道(4)上与每行组件位置对应处。
3.根据权利要求2所述的屋顶分布式光伏清洗机器人,其特征在于:所述换行轨道(4)设置在组件的边框处。
4.一种权利要求1所述的屋顶分布式光伏清洗机器人的控制方法,其特征在于,对机器人本体进行以下控制:
5.根据权利要求4所述的控制方法,其特征在于:卡死解除控制中调节各驱动轮的电机差速运动,指:调节卡死的驱动轮其电机停止运转,其他驱动轮的电机进行运动,使机器人本体后退和位姿纠偏。
技术总结
本发明公开了一种屋顶分布式光伏清洗机器人及其控制方法,机器人本体长度方向垂直于组件的多行平行方向设置,机器人本体上设置有四个驱动轮并呈四角分布,通过驱动轮在组件表面接触行走,四个驱动轮上分别设置倾角传感器、分别通过电机驱动,定位系统包括RFID传感器和若干的RFID标签,RFID传感器安装在机器人本体上,RFID标签提供定位标签,设置在每行组件的运行末端,电控系统包括存储模块、倾角获取模块、电机控制模块,电控系统关联驱动轮和定位系统,控制机器人本体自动化运行。对于屋顶分布式光伏单行及自主跨行清洗的设备控制,实现精准、定向的运行定位,实时及时纠偏倾斜,发现和解除运行中的卡死,保证运行可靠性。
技术研发人员:汪达坤,丁林,徐鹏贺
受保护的技术使用者:中节能太阳能科技(镇江)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!