一种堆叠物体无序抓取方法及系统与流程
本发明涉及物品自动抓取,尤其涉及一种堆叠物体无序抓取方法及系统。
背景技术:
1、现有的堆叠物体无序抓取系统大部分用的是二维视觉技术,不易获取堆叠物体的深度信息,且不容易区分堆叠的堆叠物体,抓取的精度低。
技术实现思路
1、本发明所要解决的技术问题是提供一种堆叠物体无序抓取方法及系统,以提高抓取的精度和准确率。
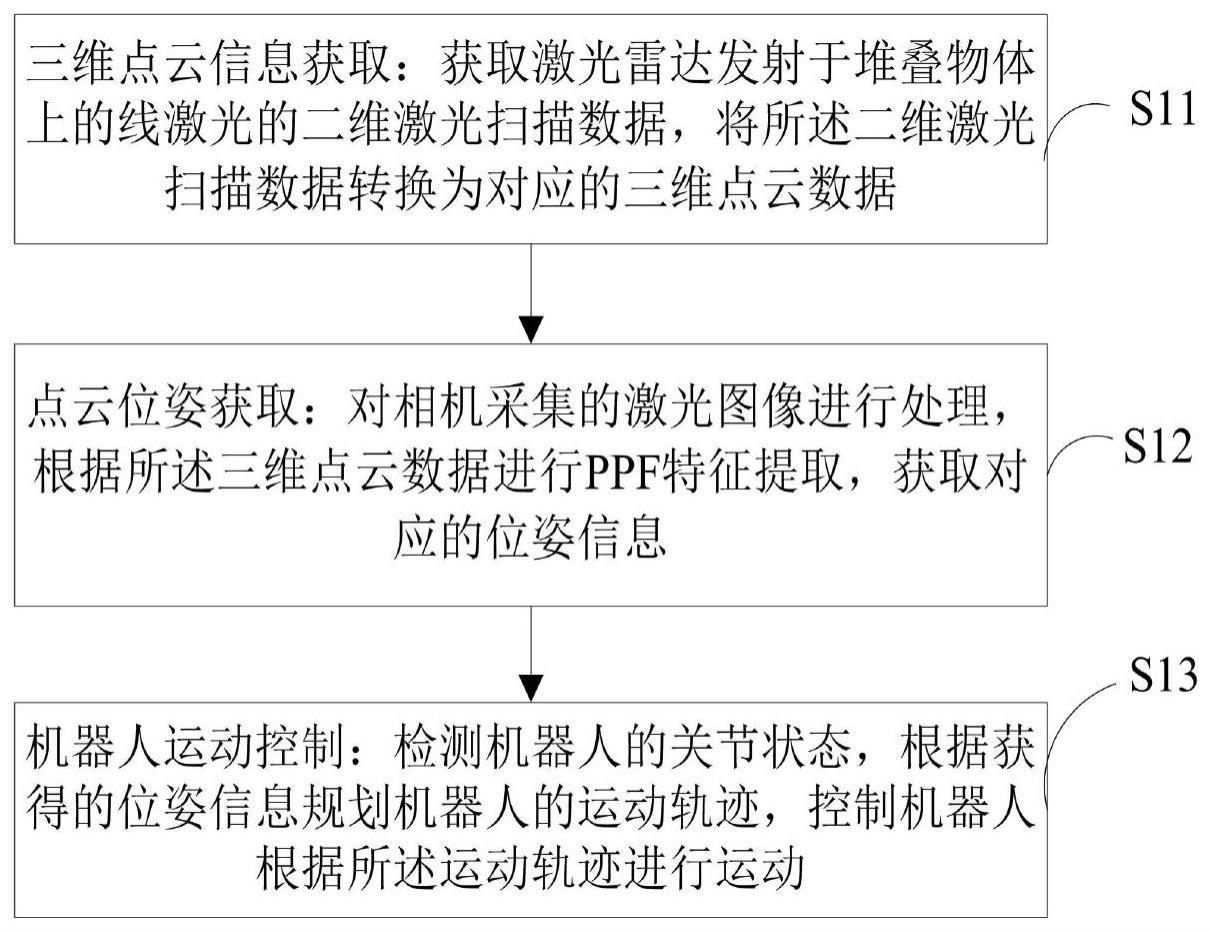
2、第一方面,本发明提供了一种堆叠物体无序抓取方法,包括以下步骤:三维点云信息获取:获取激光雷达发射于堆叠物体上的线激光的二维激光扫描数据,将所述二维激光扫描数据转换为对应的三维点云数据;点云位姿获取:对相机采集的激光图像进行处理,根据所述三维点云数据进行ppf特征提取,获取对应的位姿信息;机器人运动控制:检测机器人的关节状态,根据获得的位姿信息规划机器人的运动轨迹,控制机器人根据所述运动轨迹进行运动。
3、第二方面,本发明还提供了一种堆叠物体无序抓取系统,包括三维视觉功能模块、点云位姿获取模块及机器人跟踪抓取模块,所述三维视觉功能模块包括相机和激光雷达,用于获取激光雷达发射于堆叠物体上的线激光的二维激光扫描数据,将所述二维激光扫描数据转换为对应的三维点云数据,获取相机采集的堆叠物体上的激光图像;所述点云位姿获取模块用于对相机采集的激光图像进行处理,根据所述三维点云数据进行ppf特征提取,获取对应的位姿信息;所述机器人跟踪抓取模块用于检测机器人的关节状态,根据获得的位姿信息规划机器人的运动轨迹,控制机器人根据所述运动轨迹进行运动。
4、本发明的有益技术效果在于:本发明的堆叠物体无序抓取方法通过利用激光雷达获取堆叠物体上的线激光的二维激光扫描数据并将其转换为对应的三维点云数据,以提高定位精度,且不易受影响,成本低,对相机采集的激光图像进行处理并根据三维点云数据提取ppf特征,获取对应的位姿信息,根据位姿信息规划机器人的运动轨迹并控制机器人根据运动轨迹进行运动,实现利用三维点云进行位姿获取,从而提高抓取准确率。本发明的堆叠物体无序抓取系统也具有上述功能。
技术特征:
1.一种堆叠物体无序抓取方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的堆叠物体无序抓取方法,其特征在于,所述三维点云信息获取的步骤具体包括:
3.根据权利要求2所述的堆叠物体无序抓取方法,其特征在于,所述三维点云数据获取的步骤后还包括:
4.根据权利要求3所述的堆叠物体无序抓取方法,其特征在于,所述堆叠物体识别的步骤后还包括:
5.根据权利要求1所述的堆叠物体无序抓取方法,其特征在于,所述点云位姿获取的步骤前还包括:
6.根据权利要求5所述的堆叠物体无序抓取方法,其特征在于,所述点云位姿获取的步骤包括:
7.根据权利要求6所述的堆叠物体无序抓取方法,其特征在于,所述点对距离计算的步骤具体为:
8.根据权利要求1所述的堆叠物体无序抓取方法,其特征在于,所述遍历所述模板点云k维树和场景点云k维树求取模板点云和场景点云之间各点对应的最近点点对的步骤具体为:
9.一种堆叠物体无序抓取系统,其特征在于,包括:
技术总结
本发明公开了一种堆叠物体无序抓取方法,包括以下步骤:三维点云信息获取:获取激光雷达发射于堆叠物体上的线激光的二维激光扫描数据,将所述二维激光扫描数据转换为对应的三维点云数据;点云位姿获取:对相机采集的激光图像进行处理,根据所述三维点云数据进行PPF特征提取,获取对应的位姿信息;机器人运动控制:检测机器人的关节状态,根据获得的位姿信息规划机器人的运动轨迹,控制机器人根据所述运动轨迹进行运动。本发明的堆叠物体无序抓取方法通过利用激光雷达获取堆叠物体上的线激光的二维激光扫描数据并将其转换为对应的三维点云数据,以提高定位精度,且不易受影响,成本低。本发明还公开了一种堆叠物体无序抓取系统。
技术研发人员:丁克,丁兢,刘芊伟,李翔,马洁,王丰,叶闯,张成,林锦辉,胡财荣,陆俊君,淳豪,张敏,王凯
受保护的技术使用者:佛山显扬科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!