一种开关柜带电检测机器人的制作方法
本发明属于带电检测机器人,具体为一种开关柜带电检测机器人。
背景技术:
1、在对开关柜大批量检测时,无法对开关柜进行断电的前提下,需要通过带电机器人对开关柜进行检测。公告号为cn116061208a的发明专利公开了一种开关柜带电检测机器人,包括滑动底座和地面。本发明通过在滑动底座的前进方向设置一个按钮,并在按钮的内侧固定连接一个通电贴,在通电贴和安装槽最内侧的内壁之间固定连接一个支撑弹簧,在安装槽的中部固定安装一个导电环,通过导电环将通电贴卡在内侧,并通过支撑弹簧的弹性支撑使两者紧密贴合,进而使滑动底座可以通电移动,将滑动底座滑动卡接在地面顶部设置的导向滑槽中,在开关柜的正面均设有一个定位杆,并与按钮保持在同一水平高度,当滑动底座缓慢移动到指定位置时,此时定位杆就会对按钮产生挤压,进而使滑动底座的移动设施断电停止移动,从而起到精准定位的作用。但是目前的开关柜带电检测机器人还存在一些问题:1、机器人在检测时的自由度较差,并且需要预先设置轨道,影响机器人的适用性;2、在检测的过程中开关柜的数量较多,导致一些开关柜位置的光线较差,影响监控器对图像的采集,影响正常操作;3、在对机器人进行搬运时,监控器和检测臂的高度较高占用空间较差,影响搬运携带,并且监控器和检测臂容易被磕碰损坏。因此,需要设计一种开关柜带电检测机器人。
技术实现思路
1、本发明的目的在于解决上述上述背景技术中存在的自由度较差、光线较差和不方便搬运携带的问题,而提供一种开关柜带电检测机器人。
2、为了解决上述问题,本发明提供如下技术方案:
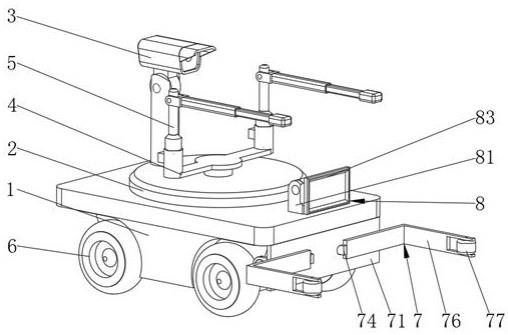
3、一种开关柜带电检测机器人,包括机器人,所述机器人上设置有转动座,转动座上接触有监控器,转动座上设置有有驱动架,驱动架的内部滑动连接有检测臂,机器人上设置有四个均匀分布的电驱轮,机器人上设置有对准机构,机器人上设置有补光机构,转动座和驱动架上均设置有快拆机构,驱动架的内部固定连接有插头,插头与检测臂插接。
4、作为优选,所述对准机构包括固定板,机器人上固定连接有固定板,固定板上固定安装有双轴电机,双轴电机的输出轴上固定连接有螺杆,螺杆的外侧通过螺纹连接有螺纹架,螺纹架的外侧固定连接有对准架,对准架和螺纹架均与固定板滑动连接,对准架上转动连接有前导轮,启动双轴电机,带动螺杆反向转动,螺杆反向转动的过程中通过与螺纹架之间的螺纹配合带动两个对准架相反的方向进行移动,当两个对准架完全张开后,通过电驱轮对准架罩在开关柜的外侧后,控制双轴电机带动螺杆正向转动,将对准架进行回收,在回收的过程中,当其中一个对准架和其上的前导轮与开关柜接触时,可以带动机器人进行横移,并且当两个前导轮均与开关柜接触时,便可将机器人放置在开关柜的正前方,方便后续检测臂的检测。
5、作为优选,所述固定板的外侧固定连接有支撑架,支撑架与螺杆通过轴承连接,支撑架可以对螺杆进行支撑。
6、作为优选,所述补光机构包括固定座,机器人的上端固定连接有固定座,固定座的内部铰接有铰接座,铰接座的外侧固定连接有补光灯,铰接座上开设有多个均匀分布的定位槽,固定座的内部滑动连接有推动架,推动架的内部活动连接有滚珠,固定座的内部设置有弹簧一,滚珠与定位槽接触,推动架与铰接座接触,翻转补光灯,补光灯带动铰接座进行偏转,铰接座在偏转的过程中通过当前的定位槽推动滚珠和推动架向下移动,并对弹簧一进行压缩,当滚珠脱离当前的定位槽时,便可对铰接座和补光灯的角度进行调节,当补光灯的角度适中时,弹簧一复位,弹簧一可以通过弹力带动滚珠滑入到调节后的定位槽的内部,从而可以通过补光灯对需要补光的位置进行补光,避免监控器采集不到光线较暗位置的图像。
7、作为优选,所述弹簧一的一端与固定座固定连接,弹簧一的另一端与推动架固定连接,弹簧一可以通过弹力带动推动架自动复位。
8、作为优选,所述快拆机构包括固定柱,监控器上固定连接有固定柱,固定柱与转动座滑动连接,转动座的内部滑动连接有滑动杆,滑动杆的一端固定连接有拉环板,拉环板上固定连接有限位杆,限位杆与固定柱滑动连接,拉环板与转动座接触,滑动杆的内部设置有拉簧,驱动架的内部滑动连接有连接杆,连接杆的一端固定连接有限位架,限位架与检测臂滑动连接,限位架与驱动架滑动连接,连接杆的另一端固定连接有拉手板,拉手板与驱动架接触,连接杆的外侧设置有弹簧二,拉动拉环板,拉环板带动限位杆进行移动,并通过滑动杆对拉簧进行拉伸,当限位杆脱离固定柱时,便可接触对固定柱的限位,然后便可将监控器和固定柱从转动座上拆卸下来,然后再拉动拉手板,拉手板通过连接杆带动限位架进行移动,并对弹簧二进行压缩,当限位架脱离检测臂时,便可将检测臂从驱动架上拆卸下来,从而可以有效的减小机器人的整体体积,可以使得机器人更加便于搬运与携带。
9、作为优选,所述拉簧的一端与转动座固定连接,拉簧的另一端与滑动杆固定连接,拉簧可以通过弹力带动滑动杆自动复位。
10、作为优选,所述弹簧二的一端与驱动架固定连接,弹簧二的另一端与限位架固定连接,弹簧二可以通过弹力带动限位架自动复位。
11、本发明涉及一种开关柜带电检测机器人,具有机器人行动灵活的高、可以多角度补光和便可收纳搬运的特点,与传统的开关柜带电检测机器人相比较而言,具有以下有益效果:
12、首先,通过机器人上加设电驱轮,可以通过电驱轮的转动带动机器人进行移动,并且可以通过对准机构,将机器人的检修位置进行摆正,从而可以在保证机器人的自由度的前提下更加方便的对开关柜进行检测,在检测的过程中可以通过对角度的补光灯对光线不足的位置进行补光,可以保证检测质量。
13、其次,在转动座和驱动架上均加设快拆机构,可以在需要携带时,可以将监控器和检测臂从转动座和驱动架上拆卸下来,进行单独存放,从而可以在有效的减小机器人体积的同时,对监控器和检测臂进行保护。
技术特征:
1.一种开关柜带电检测机器人,包括机器人(1),其特征在于:所述机器人(1)上设置有转动座(2),转动座(2)上接触有监控器(3),转动座(2)上设置有有驱动架(4),驱动架(4)的内部滑动连接有检测臂(5),机器人(1)上设置有四个均匀分布的电驱轮(6),机器人(1)上设置有对准机构(7),机器人(1)上设置有补光机构(8),转动座(2)和驱动架(4)上均设置有快拆机构(9),驱动架(4)的内部固定连接有插头(10),插头(10)与检测臂(5)插接。
2.根据权利要求1所述的一种开关柜带电检测机器人,其特征在于:所述对准机构(7)包括固定板(71),机器人(1)上固定连接有固定板(71),固定板(71)上固定安装有双轴电机(75),双轴电机(75)的输出轴上固定连接有螺杆(73),螺杆(73)的外侧通过螺纹连接有螺纹架(74),螺纹架(74)的外侧固定连接有对准架(76),对准架(76)和螺纹架(74)均与固定板(71)滑动连接,对准架(76)上转动连接有前导轮(77)。
3.根据权利要求2所述的一种开关柜带电检测机器人,其特征在于:所述固定板(71)的外侧固定连接有支撑架(72),支撑架(72)与螺杆(73)通过轴承连接。
4.根据权利要求1所述的一种开关柜带电检测机器人,其特征在于:所述补光机构(8)包括固定座(81),机器人(1)的上端固定连接有固定座(81),固定座(81)的内部铰接有铰接座(82),铰接座(82)的外侧固定连接有补光灯(83),铰接座(82)上开设有多个均匀分布的定位槽(84),固定座(81)的内部滑动连接有推动架(85),推动架(85)的内部活动连接有滚珠(86),固定座(81)的内部设置有弹簧一(87),滚珠(86)与定位槽(84)接触,推动架(85)与铰接座(82)接触。
5.根据权利要求4所述的一种开关柜带电检测机器人,其特征在于:所述弹簧一(87)的一端与固定座(81)固定连接,弹簧一(87)的另一端与推动架(85)固定连接。
6.根据权利要求1所述的一种开关柜带电检测机器人,其特征在于:所述快拆机构(9)包括固定柱(91),监控器(3)上固定连接有固定柱(91),固定柱(91)与转动座(2)滑动连接,转动座(2)的内部滑动连接有滑动杆(92),滑动杆(92)的一端固定连接有拉环板(93),拉环板(93)上固定连接有限位杆(94),限位杆(94)与固定柱(91)滑动连接,拉环板(93)与转动座(2)接触,滑动杆(92)的内部设置有拉簧(95),驱动架(4)的内部滑动连接有连接杆(96),连接杆(96)的一端固定连接有限位架(97),限位架(97)与检测臂(5)滑动连接,限位架(97)与驱动架(4)滑动连接,连接杆(96)的另一端固定连接有拉手板(98),拉手板(98)与驱动架(4)接触,连接杆(96)的外侧设置有弹簧二(99)。
7.根据权利要求6所述的一种开关柜带电检测机器人,其特征在于:所述拉簧(95)的一端与转动座(2)固定连接,拉簧(95)的另一端与滑动杆(92)固定连接。
8.根据权利要求6所述的一种开关柜带电检测机器人,其特征在于:所述弹簧二(99)的一端与驱动架(4)固定连接,弹簧二(99)的另一端与限位架(97)固定连接。
技术总结
本发明公开了一种开关柜带电检测机器人,包括机器人,机器人上设置有转动座,转动座上接触有监控器,转动座上设置有有驱动架,驱动架的内部滑动连接有检测臂,机器人上设置有四个均匀分布的电驱轮,机器人上设置有对准机构,机器人上设置有补光机构,转动座和驱动架上均设置有快拆机构,驱动架的内部固定连接有插头,插头与检测臂插接。本发明涉及一种开关柜带电检测机器人,具有机器人行动灵活的高、可以多角度补光和便可收纳搬运的特点。
技术研发人员:刘杰,沈盛,牟欣玮,崔栩辉,王志明,孙宁,杨喆,任伟,殷德惠,崔东,夏云飞
受保护的技术使用者:国网山东省电力公司烟台供电公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!