一种基于示教学习的双臂机器人布局优化方法
本发明涉及双臂基座优化,具体领域为一种基于示教学习的双臂机器人布局优化方法。
背景技术:
1、双臂基座布置问题是双臂操作的基础,当前的发明和论文主要关注双臂布局的位置标定问题,对于布局本身选取的关注较少。现有的方法采取公共工作空间和双臂各自工作空间乘积,旋转角度范围,运动性能和操作度等指标进行优化,这往往需要对工作空间全局进行计算和搜索,耗费大量时间和算力。而实际上双臂机器人在生产中的应用往往只是运行有限的轨迹,如双臂咖啡拉花等,全局性能并不能影响其工作。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种基于示教学习的双臂机器人布局优化方法。
2、为实现上述目的,本发明提供如下技术方案:一种基于示教学习的双臂机器人布局优化方法,其特征在于:其步骤为:
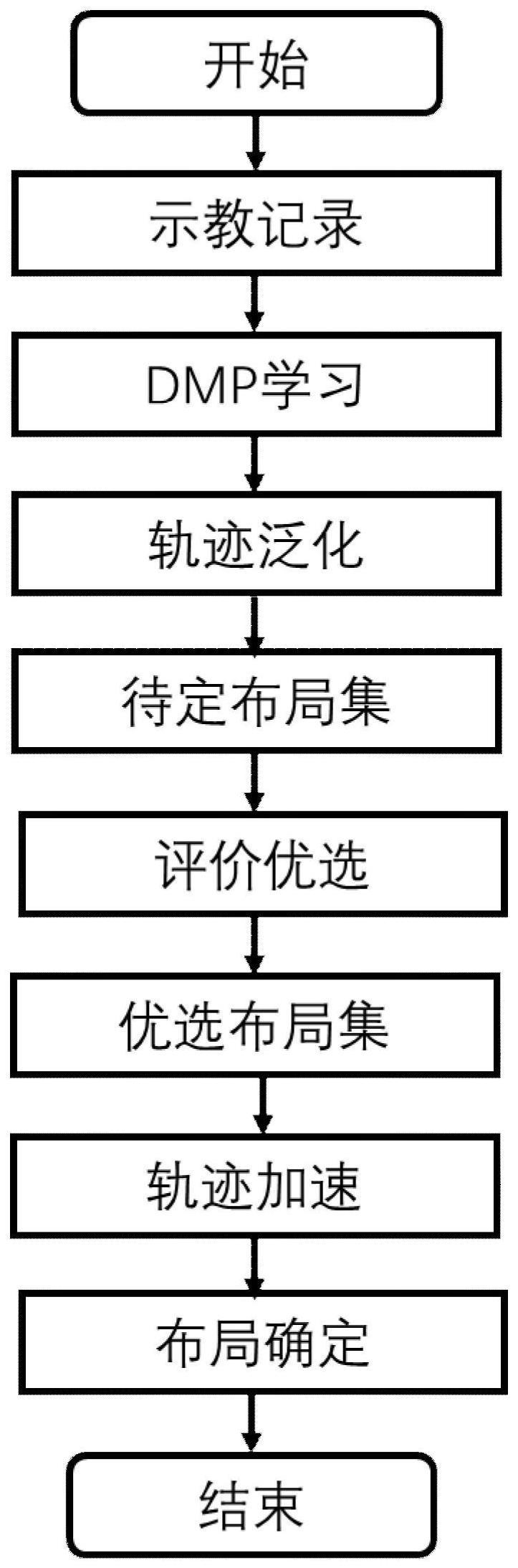
3、步骤1:示教记录:使用视觉系统读取专家在工作空间内执行任务的双手轨迹;
4、步骤2:dmp学习:使用dmp学习双手轨迹;
5、步骤3:常见轨迹终点选取并泛化轨迹:选取工作空间中轨迹的目标点,泛化得出空间内常用轨迹,减少专家工作量;
6、步骤4:选取预期布局方式:根据机器人特性和任务布局限制,确定机械臂布局待定集合;
7、步骤5:设计机器人布局衡量指标:根据现有指标,建立综合考虑机器人操作性能,公共工作空间占比的综合指标;
8、步骤6:根据指标优选待定布局:根据指标在待定布局集合中优选性能较优集合;
9、步骤7:调节学习算法参数泛化执行更快的任务轨迹:调节dmp参数加快泛化轨迹的演化,获得能更快完成任务的轨迹,由于机器人的关节限制,对机器人布局提出新的要求;
10、步骤8:确定布局方法,最后得到新布局方法。。
11、在其中一些实施例中,根据步骤2,建立dmp模型为:
12、
13、αz,为正βz常数,x为变量,g为目标,v为速度,为加速度,τ>0为时间常数,s时间无关阶段数,初值为1,αs为收敛常数,f(s)为强制项。
14、在其中一些实施例中,强制项f(s)为:
15、
16、强制项包括n高斯基元,确保轨迹的相似,y0是起始点,wi是权重,ψi是高斯核。
17、在其中一些实施例中,高斯核ψi为:ψi(s)=exp(-hi(s-ci)2),wi通过lwr进行学习。
18、在其中一些实施例中,根据步骤3-7,计算过程通过最小化目标函数获取:
19、min{ft(s)-f(s)}
20、f(s)是示教轨迹,ft(s)表达如下:
21、
22、通过设计不同的初始和结束位型,获取该双臂机器人任务的可能轨迹,为双臂基座的优化提供参考轨迹。
23、在其中一些实施例中,对不同基座参数采用多指标综合评估进行分析,具体指标如下:
24、可操纵性指数、关节极限和扩展可操纵性;
25、可操纵性指数:机器人末端执行器无条件改变其位置和方向的能力信息,该信息固有地包含在雅可比矩阵中,特别是其奇异值,表示为,
26、
27、关节极限:成本函数当一个关节变量接近其极限时,关节极限的接近度必须趋于无穷大,采用以下函数,
28、
29、扩展可操纵性:为了建立一个包含关节极限和自碰撞信息的可操纵性度量,必须计算权重矩阵,这些矩阵将有助于建立给出扩展可操作性测度的增广雅可比矩阵,使用由学习生成的轨迹避免在运动所有方向的探索和尝试,
30、
31、
32、
33、在其中一些实施例中,增广雅可比计算为,
34、
35、在其中一些实施例中,评价指标设为,
36、
37、与现有技术相比,本发明的有益效果是:基于示教学习,学习并泛化机器人在工作空间需要运行的轨迹,综合末端轨迹的运行效率和操作性能等指标,完成对双臂机器人基座的布局优化。
38、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂,通过本申请的实施例对本申请进行详尽说明和了解。
技术特征:
1.一种基于示教学习的双臂机器人布局优化方法,其特征在于:其步骤为:
2.根据权利要求1所述的一种基于示教学习的双臂机器人布局优化方法,其特征在于:根据步骤2,建立dmp模型为:
3.根据权利要求2所述的一种基于示教学习的双臂机器人布局优化方法,其特征在于:强制项f(s)为:
4.根据权利要求3所述的一种基于示教学习的双臂机器人布局优化方法,其特征在于:高斯核ψi为:ψi(s)=exp(-hi(s-ci)2,wi通过lwr进行学习。
5.根据权利要求4所述的一种基于示教学习的双臂机器人布局优化方法,其特征在于:根据步骤3-7,计算过程通过最小化目标函数获取:
6.根据权利要求5所述的一种基于示教学习的双臂机器人布局优化方法,其特征在于:对不同基座参数采用多指标综合评估进行分析,具体指标如下:
7.根据权利要求6所述的一种基于示教学习的双臂机器人布局优化方法,其特征在于:增广雅可比计算为,
8.根据权利要求7所述的一种基于示教学习的双臂机器人布局优化方法,其特征在于:评价指标设为,
技术总结
本发明涉及双臂基座优化技术领域,尤其是一种基于示教学习的双臂机器人布局优化方法,其步骤为:步骤1:示教记录;步骤2:DMP学习;步骤3:常见轨迹终点选取并泛化轨迹;步骤4:选取预期布局方式;步骤5:设计机器人布局衡量指标;步骤6:根据指标优选待定布局;步骤7:调节学习算法参数泛化执行更快的任务轨迹;步骤8:确定布局方法,本发明能加快双臂机器人平台布局优化选取,对于既定任务能够提升任务的执行效率,服务面向于既定任务的双臂平台建设。
技术研发人员:李秦川,王梓浩,史东豪
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!