一种具有给定刚度特性的非线性弹性机构及其设计方法
本发明涉及外骨骼机器人技术,特别涉及一种具有给定刚度特性的非线性弹性机构及其设计方法。
背景技术:
1、外骨骼技术对于解决辅助老年人运动和伤病员下肢康复等问题表现出较大的适用性。当前的外骨骼主要包括主动外骨骼和被动外骨骼,其中主动外骨骼使用电机等动力源来驱动关节,而被动外骨骼则完全利用穿戴者本身的能量作为驱动力,不需要额外动力。主动外骨骼的优势在于可以实现精确控制,劣势在于结构复杂、成本高,而且将穿戴者的势能白白浪费。相比于主动外骨骼,被动外骨骼可以将周期性运动中的势能进行有规律地存储和释放,其结构相对简单,成本低,且有效利用穿戴者的势能,有较大的理论和应用价值。
2、关节是被动外骨骼的核心部件,通常采用非线性机构实现关节的力矩-变形关系,其刚度特性直接决定了与外骨骼穿戴者的交互效果,故非线性弹性机构的设计具有重要意义。当前用于外骨骼的非线性弹性机构,极少能够完全复现关节的力矩-变形关系,从而导致穿戴者和外骨骼之间存在交互力,引起穿戴者不适。究其原因,是由于关节力矩-变形关系复杂。
技术实现思路
1、本发明的目的是克服现有技术中的不足,提出一种运用新型工作原理的具有给定刚度特性的非线性弹性机构及其设计方法。本发明使用拉簧和特制法兰为基础部件,通过改变拉簧力臂长度和拉力大小,实现给定刚度特性,可以有效复现不同的关节力矩-转角关系。同时总结出本发明所述具有给定刚度特性的非线性弹性机构的设计方法,可以依照此方法设计用于复现不同刚度特性的非线性弹性机构,具有广阔应用前景。
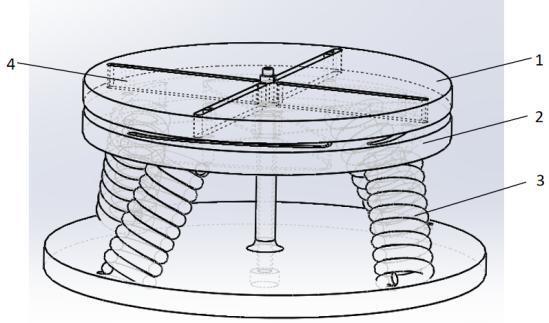
2、本发明所采用的第一技术方案是:一种具有给定刚度特性的非线性弹性机构,根据给定的力矩-转角关系,设计特定的机械结构,使所述驱动器绕转动中心转过不同角度时产生与给定力矩-转角关系描述相符的力矩,即在不同的转角呈现出不同的转动刚度,可用于弹性驱动器或无源外骨骼,以表现给定刚度特性。所述具有给定刚度特性的非线性弹性机构主要包括输入法兰、输出法兰、拉簧、拉簧自由端滑块、力矩传感器、旋转编码器几部分。其中输入法兰与输出法兰同轴心轴向布置,可以产生相对转动。拉簧一端固连于输入法兰一端,另一端固连于拉簧自由端滑块。输入法兰一端用于固连拉簧,另一端设置与给定刚度特性有关的弯曲导轨。输出法兰上设置有一条或放射性均匀设置多条沿半径方向的直线导轨。在轴向方向上,随着输入法兰与输出法兰的相对转动,一条输出法兰上的直线导轨与输入法兰上的弯曲导轨在任一角度均有唯一交点,即拉簧自由端滑块的预期位置。拉簧自由端滑块下端位于输入法兰上的弯曲导轨内,上端位于输出法兰上的直线导轨内,可以在弯曲导轨和直线导轨内自由滑动,因此,与拉簧自由端滑块固连的拉簧一端可以随滑块到达由弯曲导轨和直线导轨约束的特定位置,以此调整拉簧伸长量,进而调整拉簧拉力的大小和方向、拉簧拉力作用点,即调整拉簧拉力绕旋转中心周向分力的大小和相对旋转中心的力臂大小,实现调整力矩大小的目的。
3、进一步地,所述具有给定刚度特性的非线性弹性机构,采取了输入法兰和输出法兰同轴心轴向布置,分别设置弯曲导轨和直线导轨,两种导轨叠加的结构,输入法兰和输出法兰能够相对转动,两种导轨叠加以确定唯一的拉簧拉力作用点。
4、进一步地,所述具有给定刚度特性的非线性弹性机构,输入法兰与输出法兰中心位置开孔,便于布置安装用的主轴。
5、进一步地,所述具有给定刚度特性的非线性弹性机构,固连于输入法兰一端的拉簧数量,根据给定刚度特性的不同,以及出于所需拉簧刚度合理性的考虑,可以调整固连的拉簧数量,多于一条时,拉簧固定点在以转动中心为圆心的圆周上均匀布置。
6、进一步地,所述具有给定刚度特性的非线性弹性机构,拉簧自由端滑块下端,即与弯曲导轨接触的一端,截面形状为圆形,滑块与弯曲导轨之间为线接触,以降低滑块与弯曲导轨之间的摩擦,保证滑块能沿弯曲导轨自由滑动而不出现卡死。拉簧自由端滑块上端,即与直线导轨接触的一端,截面形状为矩形,滑块与弯曲导轨之间为面接触,保证滑块与直线导轨不会发生相对转动而严格按照直线导轨的轨迹运动。
7、本发明所采用的第二技术方案是:一种上述驱动器的设计方法,所述设计方法包括以下步骤:
8、步骤1,建立平面直角坐标系,以驱动器转动中心为原点,垂直输入法兰或输出法兰轴线并从法兰中心指向法兰外沿的半径方向为x轴正方向,x轴正方向逆时针旋转90度为y轴正方向;
9、步骤2,根据使用情境和零件加工实际条件,给定拉簧固定端转动半径r2,拉簧上下固定点垂直距离h,拉簧刚度k,拉簧线径dx,拉簧外半径rs,拉簧剪切模量g,拉簧根数n。
10、步骤3,计算拉簧圈数num,拉簧圈数num与拉簧刚度k、拉簧线径dx、拉簧外半径rs、拉簧剪切模量g的关系如式(1.1)所示:
11、(1.1)
12、根据拉簧圈数num和拉簧线径dx计算拉簧原长l0,拉簧原长l0与拉簧圈数num、拉簧线径dx的关系如式(1.2)所示:
13、(1.2)
14、步骤4,设初始状态下拉簧固定端位于(0,-r2),拉簧自由端位于(0,-r10),输入法兰与输出法兰之间相对转角为α,计算拉簧自由端初始转动半径r10。由于初始状态下,α为0,拉簧拉力沿转动半径方向,不能产生沿相对转动中心周向的分力,无法产生关于转动中心的力矩,因此,选取给定力矩-转角关系中转角接近0的一组数据:力矩ti、转角αi,以此近似计算拉簧自由端初始转动半径r10。
15、拉簧拉伸长度lab可由式(1.3)计算得到:
16、(1.3)
17、拉簧在水平面内投影长度lab_可由式(1.4)计算得到:
18、(1.4)
19、依据式(1.5)计算拉簧拉力fk:
20、(1.5)
21、依据式(1.6)计算拉簧与水平面夹角a:
22、(1.6)
23、依据式(1.7)计算拉簧拉力fk在水平方向上的分量fk_:
24、(1.7)
25、在拉簧固定端转动半径r2、拉簧水平面内投影lab_、拉簧自由端初始转动半径r10构成的三角形内运用余弦定理,求解拉簧水平面内投影lab_与拉簧自由端初始转动半径r10的夹角b_。余弦定理求解b_公式如式(1.8):
26、(1.8)
27、计算拉簧在水平面投影lab_与绕转动中心周向的夹角b,即拉簧拉力在水平方向分量fk_与沿绕转动中心周向的力分量的夹角,如式(1.9)所示:
28、(1.9)
29、由于转动角度αi非常小,拉簧拉力基本沿半径方向指向固定端,弯曲导轨对滑块施加的支持力f2基本指向转动中心,对转动中心几乎无力矩作用,因此可以将问题简化为:微小转角下拉簧拉力在沿绕转动中心周向方向的分力乘以拉簧自由端初始转动半径r10等于该转角对应力矩。
30、计算拉簧拉力在沿绕转动中心周向方向的分力ft,如式(1.10)所示:
31、(1.10)
32、建立力矩ti关于r10的一元方程,如式(1.11)所示:
33、(1.11)
34、求解方程(1.11),即可解得拉簧自由端初始转动半径r10。
35、步骤5,依次求解各转动角度对应拉簧自由端转动半径r1,这里仅给出求解自初始位置开始转动后第二个点转动半径的方法,后续各点转动半径可依此方法逐个计算。设转动角度为α1,力矩为t1,拉簧自由端坐标(xq,yq),初始位置自由端坐标(xp,yp),易得xq=r1·cosα1,yq=-r1·sinα1,xp=0,yp=-r10。设自由端位置与初始位置连线与x轴夹角为θ。对滑块进行平面内受力分析,易得直线导轨对滑块支持力f1方向垂直直线导轨,即垂直半径方向,弯曲导轨对滑块支持力f2方向为弯曲导轨法向方向,当第二点距离初始位置很近时,可以认为两点连线的法线方向即为导轨法线方向,即弯曲导轨对滑块支持力f2方向为自由端位置与初始位置连线的法线方向。拉簧拉力水平分力fk_方向为从自由端指向固定端的水平投影方向。由力矩t1逆推,可计算滑块所受直线导轨支持力f1大小,f1大小可借助式(1.12)计算:
36、 (1.12)
37、自由端位置与初始位置连线与x轴夹角θ可用式(1.13)计算:
38、(1.13)
39、借助式(1.3)~(1.8)求解拉簧拉力fk在水平方向上的分量fk_、拉簧水平面内投影lab_与拉簧自由端初始转动半径r10的夹角b_。
40、由于滑块在实际滑动过程中速度较慢,且导轨光滑,可以认为滑块在各个位置向心力及摩擦力可以忽略,即拉簧拉力在水平面内投影fk_、直线导轨支持力f1、弯曲导轨支持力f2的合力为零。将拉簧拉力在水平面内投影fk_、直线导轨支持力f1、弯曲导轨支持力f2向x轴和y轴投影,可得:
41、(1.14)
42、得到关于r1、f2的二元方程组,解方程组(1.14),即可得到r1。后续各点均按照此方法解算,每个点解出后即成为解算下一个点代入的初始位置,直到解出给定力矩-转角关系描述的最后一个位置。
43、所述具有给定刚度特性的非线性弹性机构及其设计方法的创新点在于:根据给定刚度特性,运用了新的结构和工作原理来复现给定的力矩-转角关系,为复现复杂力矩-转角关系、解决变刚度关节驱动问题,提出了一种新方案。驱动器结构简单且紧凑,能量密度高,应用于康复机器人、行走机器人等场合,可以节约能量,减小体积,并增强人机交互能力,提高机器人安全性能。提出一种设计具有给定刚度特性的非线性弹性机构的设计方法,该方法通用性强,弥补了现有串联非线性弹性机构通用设计方法的空缺。
- 还没有人留言评论。精彩留言会获得点赞!