一种6R工业机器人结构参数优化方法与流程
本发明涉及一种工业机器人结构参数算法,尤其是涉及一种使用于工业机器人结构参数算法上的6r工业机器人结构参数优化方法。
背景技术:
1、现有的工业机器人在设计过程中主要以工作空间作为设计准则,但这一准则并不能保证机械臂的灵活性,也不能衡量机械臂的动力学性能;并且工业机器人的设计过程中往往只满足工作空间和运动学设计要求,但是对于动力学性能没有进行优化,例如对于机器人运行过程中的能量消耗没有过多关注。在实际工作中,机械臂完成特定任务时其末端活动范围并不是整个工作空间,其只是整个工作空间的一部分,这样的任务需求意味着我们只需要保证给定工作空间区域的灵活性即可。此外,在工业机器人设计过程中,单台工业机器人一般长期执行单一任务场景,其运动学及动力学性能未必是最优的,由于单台机器人长期重复执行单一路径规划程序,需要引入特定轨迹下的性能指标进行针对性的结构参数优化。因此,需要设计一种在满足给定工作空间约束下,使结构紧凑的同时兼顾灵活度和能量消耗的结构参数优化方法。
技术实现思路
1、本发明为解决现有工业机器人存在着不能保证机械臂的灵活性也不能衡量机械臂的动力学性能,往往只满足工作空间和运动学设计要求,运动学及动力学性能未必是最优等现状而提供的一种不仅考虑工作空间约束,还在保证结构尽量紧凑的同时考虑了单一工作任务中的平均灵活度,另外将能量消耗引入优化指标中,可以实现在满足给定工作空间的约束下,实现基于平均灵活度与能量消耗最优的结构参数优化,同时尽量保证结构更紧凑同时兼顾灵活度和能量消耗,可使连杆长度尽量小的6r工业机器人结构参数优化方法。
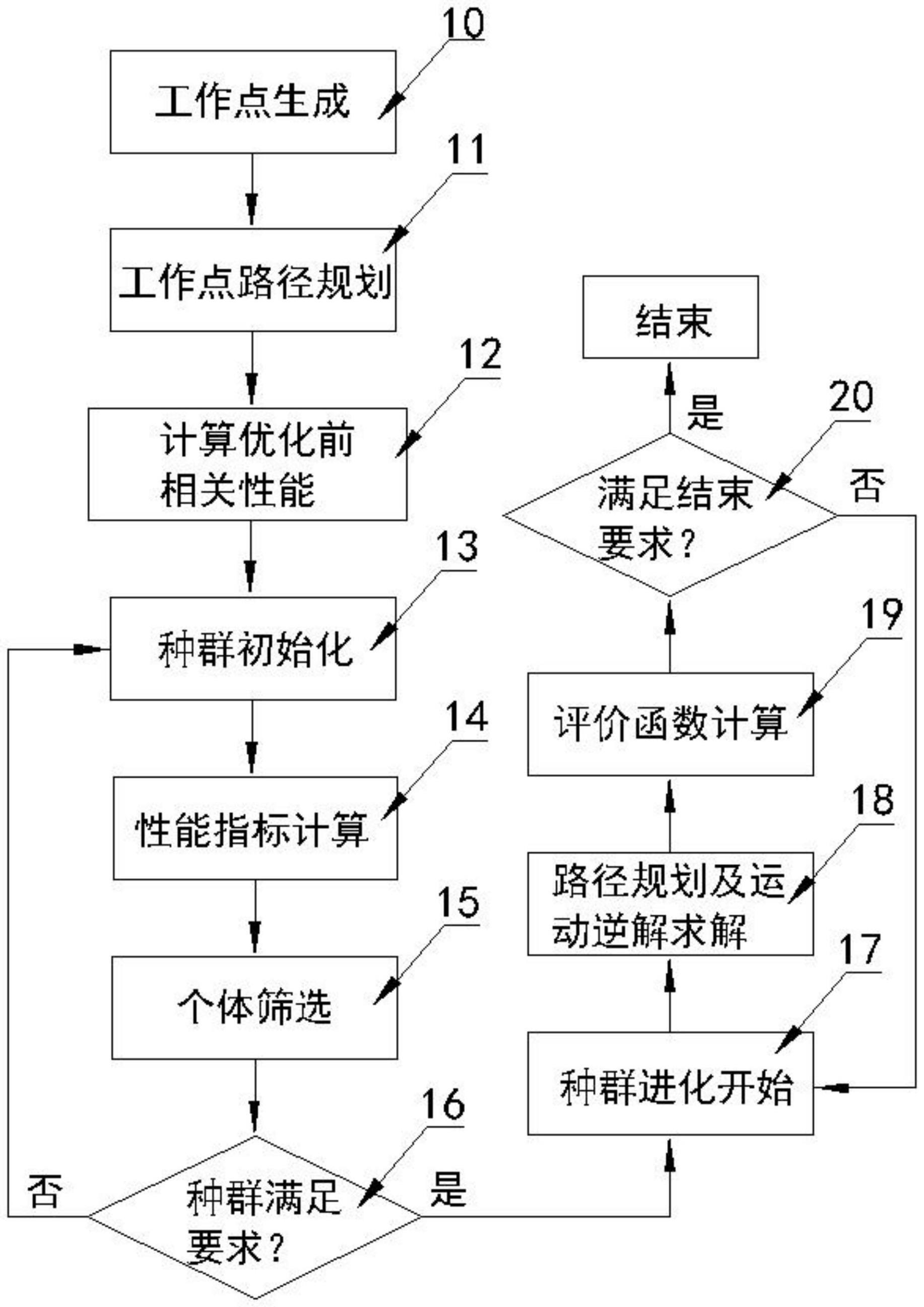
2、为解决上述技术问题,本发明采用了一种6r工业机器人结构参数优化方法,包括如下优化算法步骤:
3、a1.在给定的工作空间内随机生产n个工作点,形成工作点生成步骤,其中n为自然数;
4、a2.对生成的工作点进行工作点路径规划,按照起点、工作点、起点的循环进行工作点路径规划,确定工作轨迹;
5、a3.计算参数优化前相关性能,给定工作空间下的工作空间指标,给定工作轨迹下的平均灵活度指数和能量消耗。
6、a4.在满足约束条件的情况下,确定尺寸参数范围,并对机械臂结构参数种群进行种群初始化;
7、a5.计算种群个体的工作空间指标、平均灵活度及能量消耗指标;
8、a6.根据计算得到的性能指标,最终给出结构参数优化评价函数,对种群内的各个个体进行适应度评价,并选择个体进行种群进化操作;
9、a7.结束终止条件的判断,当进化迭代次数满足结束要求设定条件时终止条件,
10、输出最终解。
11、不仅考虑工作空间约束,还在保证结构尽量紧凑的同时考虑了单一工作任务中的平均灵活度,另外将能量消耗引入优化指标中,可以实现在满足给定工作空间的约束下,实现基于平均灵活度与能量消耗最优的结构参数优化,同时尽量保证结构更紧凑同时兼顾灵活度和能量消耗,可使连杆长度尽量小。
12、优选的,上述a5步骤包括如下优化算法步骤
13、b1.对种群内的各个个体进行性能指标上的个体筛选;
14、b2.根据个体筛选得到的筛选结果判断种群满足是否要求;
15、b3.如果判断得出不满足要求的,返回循环执行上述a4步骤;
16、b4.如果判断得出是满足要求的,执行种群进化开始操作;
17、b5.路径规划及运动逆解求解;
18、b6.根据路径规划及运动逆解求解得到的数据,进行优化评价函数计算;
19、b7.根据优化后的评价函数,判断是否满足结束要求;
20、b8.判断不满足结束要求的,返回循环执行上述b4步骤。
21、提高对种群内的各个个体进行适应度评价优化有效性。
22、优选的,所述的给定的工作空间是指给定工作空间下的工作空间指标
23、
24、基于图1所示的机器人d-h坐标系图,坐标系i的z轴zi与关节i+1的轴线重合,x轴为两相邻的z轴的公垂线,y轴按照右手准则进行确定,相邻关节沿公垂线的距离为连杆长度,表示为ai,沿关节i轴线的两个公垂线的距离为连杆偏距,表示为di。h为工业机器人的结构设计参数矩阵,在保持原机械臂的结构特征下可取h=[a1,a2,a3,d4,d6],l=a1+a2+a3+d4+d6。为工业机器人连杆长度和,l0为优化前的连杆长度和,d为给定的工作空间与机器人工作空间空隙的最小距离,d0为优化前的最小距离,λ1,λ2∈(0,1),λ1+λ2=1,λ1和λ2分别表示l和d在该指标中所占的权重。该指标旨在满足作业要求的前提下,满足结构紧凑的要求。提高工作空间指标在优化算法中结构优化有效性。
25、优选的,所述的工作轨迹下确定平均灵活指数为,
26、
27、
28、其中d为某点处的灵活度,δα,δβ,δγ分别为某点处的偏航角、俯仰角、滚动角范围,n表示工作空间或者轨迹上取的n个点,dmean表示在n个点上的平均灵活度,d0表示优化前的平均灵活度;该指标旨在提高工作任务中机械臂的平均灵活度。
29、优选的,所述的能量消耗指标:
30、
31、e(h)表示运动过程中的能量消耗,并对其进行归一化处理,e0表示优化前的能量消耗。该指标旨在降低工作过程中的能量消耗。提高能量消耗指标在优化算法中结构优化有效性。
32、优选的,所述的结构参数优化评价函数为:
33、f(h)=κ1fl(h)+κ2fd(h)+κ3fe(h) (6)
34、其中κ1,κ2,κ3∈(0,1);κ1+κ2+κ3=1。
35、其中κ1,κ2,κ3∈(0,1);κ1+κ2+κ3=1,κi为权衡系数,可以调整以改变三个性能指标在评价函数中的比重。
36、优选的,上述a7步骤中约束条件分析包括如下条件约束:
37、连杆长度约束:考虑实际情况,连杆和偏置不能太大或太小,则a1、a2、a3、d4、d6满足aimin≤ai≤aimax,i=1,2,3,djmin≤dj≤djmax,j=4,6。关节转角约束:考虑到实际情况,各关节的转动范围应有一定限制,则有θimin≤θi≤θimax,i=1,2,…,6,θi表示第i个关节的转角。
38、工作空间约束:机器人全局工作空间需要覆盖给定工作空间。
39、提高结构参数优化评价函数在优化算法中结构优化有效性。
40、优选的,利用性能指标将工业机器人机械臂的结构优化问题转化为评价函数最小值求解问题
41、提高工业机器人机械臂的结构优化问题在优化算法中结构优化有效性。式中,f(h)表示参数优化评价函数,h为工业机器人的结构设计参数矩阵,fl(h)为给定工作空间下的工作空间指标,fd(h)表示工作轨迹下的平均灵活度指数,fe(h)表示工作轨迹下的能量消耗指标,κi为权衡系数满足κ1,κ2,κ3∈(0,1);κ1+κ2+κ3=1。ai表示连杆长度,aimin和aimax表示所设定的连杆长度最小值和最大值,dj表示连杆偏距,djmin和djmax表示所设定的连杆偏距的最小值和最大值,θi表示各关节角度,θimin和θimax表示个关节运动范围的最小值和最大值。
42、本发明的有益效果是:
43、本发明针对给定工作空间与工作轨迹的机械臂,采用一种基于灵活度和能量消耗综合最优的机械臂结构参数优化方法,便于对工作任务单一的6r工业机器人进行结构参数优化,保证结构紧凑,灵活度较高、同时运行过程中能量消耗低。现有的工业机器人设计过程往往只考虑了工作空间和运动学性能,但在工作任务重复单一的场景,其运动学及动力学性能未必是最优的。本发明不仅考虑工作空间约束,还在保证结构尽量紧凑的同时考虑了单一工作任务中的平均灵活度,另外将能量消耗引入优化指标中。
44、在确定评价函数的基础上,利用遗传算法对机械臂结构参数进行优化,使优化后的机械臂在满足工作空间约束的同时灵活度尽量大,运行能量消耗尽量小。
- 还没有人留言评论。精彩留言会获得点赞!