工业机器人关节电机转矩波动系数在线检测方法及系统
本发明涉及电机转矩波动系数在线监测领域,具体说是工业机器人关节电机转矩波动系数在线检测方法及系统。
背景技术:
1、工业机器人在智能制造领域具有关键地位,它们的制造精度直接决定了最终产品的质量。这方面的焦点已经转向整机精度的长期性能监测和预测,因为这对确保产品一致性和质量至关重要。在工业机器人中,伺服电机被认为是核心组件之一,因为它们控制机器人的关键动作。伺服电机的性能指标,包括转矩波动系数和转速波动系数,对机器人的整体性能有着直接重要影响。其中,转速波动系数通常可以通过在线监测电机内部编码器的输出来获得,因此可以实时了解机器人的速度控制性能。
2、然而,测量伺服电机的转矩波动系数却相对复杂,传统的方法是使用转矩传感器来测量电机扭矩的最大/最小值,借此得到转矩波动系数。由于传感器体积较大,因而这种方法通常需要停机离线完成测量。另一种方法是基于工业机器人运行过程中伺服电机的输入电流信号来间接计算得出转矩,考虑到电流信号可以直接从机器人控制器中读出,因而该方法为转矩波动系数的在线测量提供了潜在的解决方案。
3、传统的基于电信号的转矩波动系数方法的核心是需要基于反电动势来计算出磁链大小,而反电动势通常基于反拖法实现,因而这同样需要在运行中停机来测量,依然无法实现在线测量。
技术实现思路
1、本发明目的是提供一种工业机器人关节电机转矩波动系数在线监测方法及系统,本发明充分考虑了电机的转矩波动系数是影响关节机器人精度的重要参数,又考虑到测量转矩的方法会有较大误差和对关节机器人工作带来影响的问题,提出利用机理推导的方式来计算转矩波动系数。
2、本发明为实现上述目的所采用的技术方案是:一种工业机器人关节电机转矩波动系数在线监测方法,包括以下步骤:
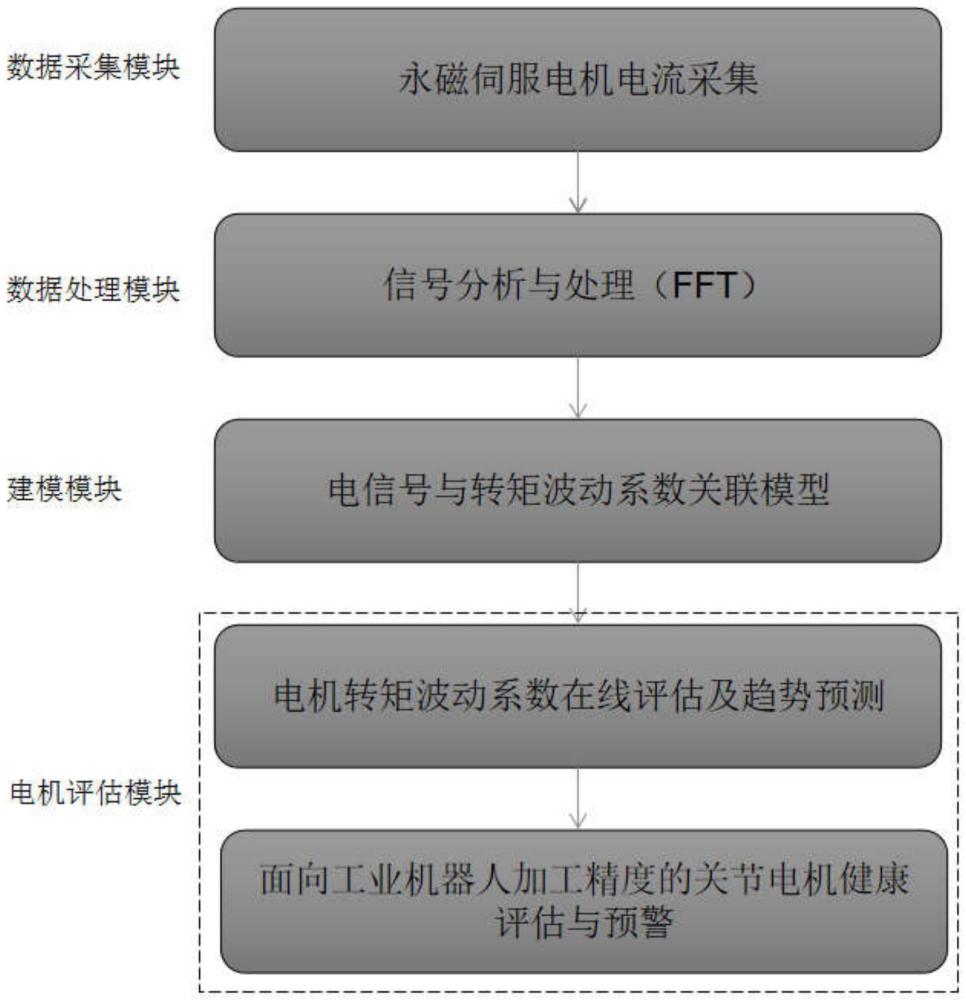
3、1)永磁伺服电机电流采集:
4、对永磁电机的某相线圈进行改造,以模拟匝间短路故障,形成故障注入验证实验;数据采集模块通过电流互感器设备获取永磁电机的三相定子电流iu、iv、iw,并发送至数据处理模块;
5、2)信号分析及处理:数据处理模块对步骤1)中采集到的三相定子电流iu、iv、iw进行fft频谱分析,获取基波电流和谐波电流;
6、3)建模模块根据获取基波电流和谐波电流,构建电信号与转矩波动系数关联模型;
7、4)根据电信号与转矩波动系数关联模型,基于机器学习预测转矩波动系数趋势,得到转矩波动系数的预测结果;
8、5)电机评估模块获取转矩波动系数的失效阈值,并根据转矩波动系数的预测结果与失效阈值进行比对,对电机的转矩波动系数进行实时健康评估与预警。
9、所述对永磁电机的某相线圈进行改造,具体为:
10、将电机的某相线圈取出,分别在匝数比为0%,2%,5%,10%,15%的位置接入导线,将线圈重新放入电机,并将导线延伸至电机外部;
11、在实验过程中,在电机外将0%处延伸的导线分别与其他导线连接,以此来模拟匝间短路故障。
12、所述对三相定子电流iu、iv、iw进行fft频谱分析,获取基波电流和谐波电流,即:
13、
14、其中,t为时间,i1、w1和分别为基波电流幅值、频率和相位,ik、wk和分别为u相的高阶谐波电流幅值、频率和相位;in、wn和分别为v相的高阶谐波电流幅值、频率和相位;im、wm和分别为w相的高阶谐波电流幅值、频率和相位。
15、所述步骤3),具体为:
16、1-1)建模模块根据获取基波电流和谐波电流,获取永磁电机q轴的电流iq;
17、1-2)通过永磁电机q轴的电流iq,获取转矩波动系数ktb;
18、1-3)通过机理模型建立三相定子电流iu、iv、iw,和转矩波动系数ktb之间的关联模型,并通过实际测量的转矩波动系数来修正模型,进而提高模型精度。
19、所述步骤1-1),具体为:
20、将三相定子静止坐标系变换为两相转子转系,即dp坐标系,以解耦转子位置造成的影响;
21、将三相定子电流的基波电流和谐波电流公式和变换矩阵公式联立,获得两相转子转系下的q轴电流参数iq,即:
22、
23、其中,θr为两相转子转系中d轴和三相定子静止坐标系中a轴的夹角。
24、所述步骤1-2),具体为:
25、在dq坐标系下,电磁转矩方程为:
26、
27、对于表凸式永磁同步电机,磁路结构有ld=lq的特点,简化后后的电磁转矩方程,即:
28、
29、永磁电机采用的是id=0的控制方法,即使得三相电流在dq坐标系下的直轴分量为0,即励磁电流为0;永磁体不受励磁电流的影响磁链不变,即为定值;则q轴电流iq和电磁转矩tem为线性关系;进而获取到转矩波动系数,即:
30、
31、其中,ktb为转矩波动系数,tmax为电磁转矩tem的最大值,tmin为电磁转矩tem的最小值;
32、q轴电流iq和电磁转矩tem为线性关系,转矩波动系数为:
33、
34、其中,ktb为转矩波动系数,imax为q轴电流iq的最大值,imin为q轴电流iq的最小值。
35、所述步骤4),具体为:
36、根据电信号与转矩波动系数关联模型,获取转矩波动系数,通过电机的加速寿命实验,获得一个全寿命电机转矩波动系数时序数据;
37、基于机器学习模型或者深度学习模型,通过历史的转矩波动系数的时序数据和正在运行电机的已知转矩波动系数的时序数据,预测该电机未来的转矩波动系数时序数据,完成转矩波动系数未来时序预测,得到转矩波动系数的预测结果。
38、所述转矩波动系数的失效阈值,包括:报警阈值和停机阈值。
39、所述步骤5),具体为:
40、2-1)电机评估模块基于国标和行业标准,获取到重复定位精度报警阈值在±0.02mm范围内,停机阈值在±0.05mm范围内;
41、2-2)获取到重复定位精度的报警阈值和停机阈值后,通过机器人的运动学和机理分析,对工业机器人进行加速实验;
42、2-3)在实验中同时测量转矩波动系数和重复定位精度,获取转矩波动系数和重复定位精度的映射关系;
43、2-4)通过转矩波动系数和重复定位精度映射关系,获得转矩波动系数的报警阈值和停机阈值。
44、一种工业机器人关节电机转矩波动系数在线检测系统,包括:数据采集模块、数据处理模块、建模模块以及电机评估模块;
45、所述数据采集模块,用于通过电流互感器设备获取待测电机的三相定子电流,并发送至数据处理模块;
46、所述数据处理模块,用于采集到的三相定子电流进行fft频谱分析,获取基波电流和谐波电流,并发送至建模模块;
47、所述建模模块,用于根据基波电流和谐波电流,获取永磁电机q轴的电流iq,并进而获取转矩波动系数ktb;通过机理模型建立三相定子电流iu、iv、iw,和转矩波动系数ktb之间的关联模型,并通过实际测量的转矩波动系数来修正模型;
48、所述电机评估模块,用于获取转矩波动系数的失效阈值,,并根据转矩波动系数的预测结果与失效阈值进行比对,对电机的转矩波动系数进行实时健康评估与预警。
49、本发明具有以下有益效果及优点:
50、1.本方法充分考虑的转矩波动系数难以直接测量的问题,通过机理分析的方式,采集三相定子电流来计算转矩波动系数,对于避免因电机故障引发的意外停机事故以及最终实现工业装备的维护有重要意义。
51、2.本发明融合了机理和数据驱动方法,结合了伺服电机性能的机理模型和实际数据的分析,从而提高了监测的准确性。
52、3.本发明面向工业机器人整机精度退化与健康管理需求,引入了关节电机健康评估和预警,通过电信号的实时分析,监测伺服电机的转矩波动系数并预测其趋势。这有助于提前识别潜在问题,实现整机故障的预测与健康管理。
- 还没有人留言评论。精彩留言会获得点赞!