一种腕部结构及机器人的制作方法
本发明涉及机器人,更具体地说,涉及一种机器人腕部结构。此外,本发明还涉及一种包括上述机器人腕部结构的机器人。
背景技术:
1、机器人的手腕结构对机器人的整体性能起着关键作用,尤其在焊接、喷涂等行业中对机器人的手腕关节灵活度要求较高,需要能够在复杂、狭小空间内作业。
2、目前,市面上的多数机器人的手腕结构采用中空轴,将机器人本体的管线从中空轴的内孔中穿过,从而避免管线对周边设备造成干涉的情况的发生,且中空手腕结构普遍采用定压预紧方式对锥齿轮实现定位,比如采用波簧等弹性结构预压紧锥齿轮,使得锥齿轮的受力恒定为一个方向,但随着弹性结构的逐渐老化甚至失效,容易造成锥齿轮在轴向发生窜动,这会改变齿轮副的侧隙,极大的影响机器人手腕运行的平稳性。
3、综上所述,如何提高机器人手腕运行稳定性,是目前本领域技术人员亟待解决的问题。
技术实现思路
1、有鉴于此,本发明的目的是提供一种腕部结构,该腕部结构的稳定性较高。
2、本发明的另一目的是提供一种包括上述腕部结构的机器人。
3、为了实现上述目的,本发明提供如下技术方案:
4、一种腕部结构,用于转动连接机器人的大臂和小臂,包括用于转动连接大臂末端的腕部壳体、固定于所述腕部壳体的套筒、用于驱动小臂绕其自身轴线转动的转轴、用于接收外部驱动力以驱动所述转轴转动的从动件、用于支撑所述从动件的第三轴承和第四轴承,所述转轴转动套设于所述套筒外部,所述从动件套设于所述转轴的外部,以带动所述转轴转动,其特征在于,还包括:
5、第一定位组件,其包括固定连接于所述腕部壳体的轴承盖、固定连接于所述腕部壳体的壳体件和套设于所述转轴外部且套设于所述壳体件内部的第一阻挡件,所述转轴穿过所述轴承盖和所述壳体件中部的通孔;
6、所述从动件包括共轴设置的齿结构和传动轴,所述齿结构和所述传动轴相对的端面之间夹持所述第三轴承的内圈,所述腕部壳体内壁的抵接结构和所述轴承盖之间夹持所述第三轴承的外圈;
7、所述第四轴承位于所述传动轴远离所述齿结构的一端,且所述传动轴和所述第一阻挡件之间夹持所述第四轴承的内圈。
8、优选的,还包括用于为所述从动件提供驱动力的主动件、用于支撑所述主动件的第一轴承和第二轴承,还包括第二定位组件,所述第二定位组件包括套设于所述主动件的垫圈、同轴固定连接于所述主动件的第二阻挡件和固定连接于所述腕部壳体的第一轴承座;
9、所述垫圈与所述第二阻挡件之间夹持所述第一轴承的内圈;
10、所述垫圈与所述主动件周面的抵接结构之间夹持所述第二轴承的内圈;
11、所述第一轴承座内壁的抵接结构夹设于所述第一轴承的外圈和所述第二轴承的外圈之间。
12、优选的,所述第二阻挡件为从动带轮,用于与皮带配合,以驱动所述主动件和所述从动件。
13、优选的,所述壳体件的末端具有法兰结构,用于连接减速器输入端的法兰盘。
14、优选的,所述壳体件包括连接件和传动件,所述连接件的顶端固定连接所述腕部壳体,所述连接件的底端与所述传动件的顶端可拆卸连接,所述法兰结构位于所述传动件的底端。
15、优选的,所述转轴的外部套设有密封圈,所述密封圈位于所述壳体件内腔的末端。
16、优选的,所述第一阻挡件为波形垫片。
17、优选的,所述腕部壳体包括可拆卸连接的本体和第二轴承座,所述第一轴承座连接于所述本体,所述轴承盖、所述壳体件均固定连接于所述第二轴承座。
18、优选的,所述本体具有相对设置的第一连接耳和第二连接耳,所述第一连接耳用于固定连接所述第一轴承座,所述第二连接耳用于连接旋转组件,以驱动所述腕部结构和所述小臂转动;
19、所述本体还具有供所述套筒穿过的通孔,所述通孔位于所述第一连接耳、所述第二连接耳之间;
20、所述本体于所述第一连接耳、所述第二连接耳之间固定连接有安装件,且所述安装件的中部具有与所述通孔共线的阶梯孔,所述阶梯孔的阶梯面抵接于所述套筒的顶面。
21、一种机器人,包括上述任一项所提供的腕部结构。
22、本发明提供的腕部结构,轴承盖和壳体件均固定在腕部壳体的开口端,且轴承盖位于壳体件和腕部壳体组成的内腔中,转轴可转动的设置在壳体件和腕部壳体组成的内腔中,且转轴穿过轴承盖自壳体件下端开口伸出,用于连接机器人小臂;第三轴承位于传动轴的上端,第四轴承位于传动轴的另一端,第三轴承与第四轴承配合,从而支撑起转动的从动件和转轴。
23、第三轴承的内圈通过齿结构和传动轴定位,套设在转轴外部的从动件包括两部分,即中空的齿结构和中空的传动轴,且齿结构、传动轴相对的端部均向其自身轴线方向内凹或垂直其自身轴线方向外凸等,则齿结构与传动轴可以沿轴向夹持住第三轴承的内圈。
24、第三轴承的外圈通过腕部壳体内壁的抵接结构和轴承盖定位,腕部壳体的开口端设置抵接结构用于抵接第三轴承外圈的上端,且通过安装在腕部壳体上面的轴承盖抵接第三轴承外部的下端;再者,腕部壳体中自抵接结构的位置向下,腕部壳体的内腔的尺寸逐渐变大,从而可以自下向上逐个安装第三轴承、传动轴、轴承盖等。
25、第四轴承的内圈通过传动轴周面的抵接结构和第一阻挡件定位,传动轴的下端设置抵接结构用于抵接第四轴承内圈的上端,且通过第一阻挡件抵接第四轴承内圈的下端;再者,组装时,第一阻挡件的自下向上先安装传动轴后,在传动轴上面套设轴承,再在转轴上面套设第一阻挡件和轴承盖等。
26、该腕部结构采用定位预紧的方式对第三轴承、第四轴承进行了轴向定位,极大的降第三轴承、第四轴承沿轴向窜动的风险,同时通过第三轴承、第四轴承与从动件的配合,有效降低从动件沿轴向窜动的风险,有利于保证该腕部结构的稳定性。
技术特征:
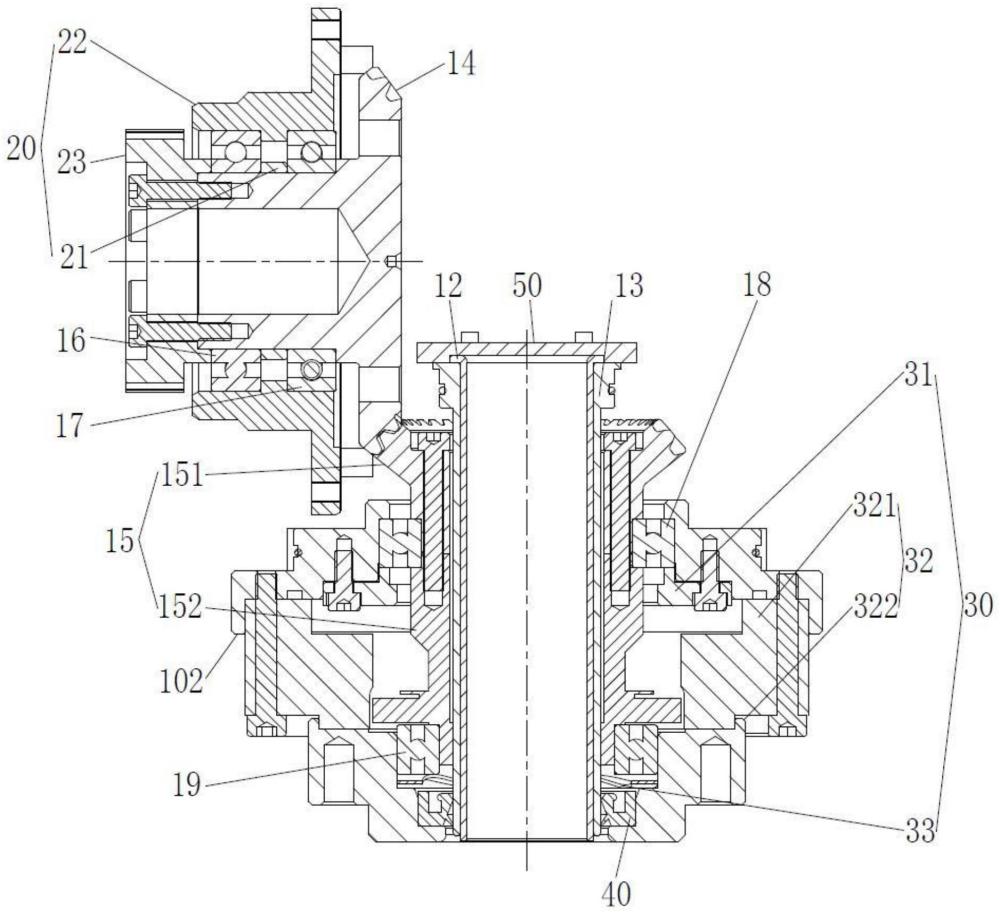
1.一种腕部结构,用于转动连接机器人的大臂和小臂,包括用于转动连接大臂末端的腕部壳体(10)、固定于所述腕部壳体(10)的套筒(12)、用于驱动小臂绕其自身轴线转动的转轴(13)、用于接收外部驱动力以驱动所述转轴(13)转动的从动件(15)、用于支撑所述从动件(15)的第三轴承(18)和第四轴承(19),所述转轴(13)转动套设于所述套筒(12)外部,所述从动件(15)套设于所述转轴(13)的外部,以带动所述转轴(13)转动,其特征在于,还包括:
2.根据权利要求1所述的腕部结构,还包括用于为所述从动件(15)提供驱动力的主动件(14)、用于支撑所述主动件(14)的第一轴承(16)和第二轴承(17),其特征在于,还包括第二定位组件(20),所述第二定位组件(20)包括套设于所述主动件(14)的垫圈(21)、同轴固定连接于所述主动件(14)的第二阻挡件(23)和固定连接于所述腕部壳体(10)的第一轴承座(22);
3.根据权利要求2所述的腕部结构,其特征在于,所述第二阻挡件(23)为从动带轮,用于与皮带配合,以驱动所述主动件(14)和所述从动件(15)。
4.根据权利要求1所述的腕部结构,其特征在于,所述壳体件(32)的末端具有法兰结构(3221),用于连接减速器输入端的法兰盘。
5.根据权利要求4所述的腕部结构,其特征在于,所述壳体件(32)包括连接件(321)和传动件(322),所述连接件(321)的顶端固定连接所述腕部壳体(10),所述连接件(321)的底端与所述传动件(322)的顶端可拆卸连接,所述法兰结构(3221)位于所述传动件(322)的底端。
6.根据权利要求4所述的腕部结构,其特征在于,所述转轴(13)的外部套设有密封圈(40),所述密封圈(40)位于所述壳体件(32)内腔的末端。
7.根据权利要求1所述的腕部结构,其特征在于,所述第一阻挡件(33)为波形垫片。
8.根据权利要求2所述的腕部结构,其特征在于,所述腕部壳体(10)包括可拆卸连接的本体(101)和第二轴承座(102),所述第一轴承座(22)连接于所述本体(101),所述轴承盖(31)、所述壳体件(32)均固定连接于所述第二轴承座(102)。
9.根据权利要求8所述的腕部结构,其特征在于,所述本体(101)具有相对设置的第一连接耳和第二连接耳,所述第一连接耳用于固定连接所述第一轴承座(22),所述第二连接耳用于连接旋转组件(11),以驱动所述腕部结构和所述小臂转动;
10.一种机器人,其特征在于,包括权利要求1至9任一项所述的腕部结构。
技术总结
本发明公开了一种腕部结构及机器人,涉及机器人技术领域。腕部结构包括第一定位组件,且第一定位组件包括固定连接于腕部壳体的轴承盖、固定连接于腕部壳体的壳体件和套设于转轴外部且套设于壳体件内部的第一阻挡件,转轴穿过轴承盖和壳体件中部的通孔。其中,从动件包括共轴设置的齿结构和传动轴,齿结构和传动轴相对的端面之间夹持第三轴承的内圈,腕部壳体内壁的抵接结构和轴承盖之间夹持第三轴承的外圈;第四轴承位于传动轴远离齿结构的一端,且传动轴和第一阻挡件之间夹持第四轴承的内圈。该腕部结构的稳定性较高。
技术研发人员:黄南洋,周国麟
受保护的技术使用者:北京配天技术有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!