全自动钻锚机器人的六轴机械臂的制作方法
1.本实用新型涉及一种全自动钻锚机器人的六轴机械臂,属于机械臂领域。
背景技术:
2.常规机械臂的前端、尤其是机械臂最终的输出部位,多通过链条或者皮带实现传动;如此设置,轴与轴之间的杠杆力较大,也就使得用于驱使链条或者皮带运动的电机负载大、输出大;这种情况下,机械臂受力不均匀、容易抖动。
3.同时,现有技术虽然存在一些多轴机械臂,但是大部分采用导轨支撑油缸推移的方式,调整维度少,作业时受限较多,不灵活。
技术实现要素:
4.为克服现有技术的缺陷,本实用新型提供一种全自动钻锚机器人的六轴机械臂,本实用新型的技术方案是:
5.一种全自动钻锚机器人的六轴机械臂,包括前机械臂、后机械臂、第一旋转关节、第二旋转关节、第三旋转关节和组合关节,所述的后机械臂的一端的下部安装在所述的第一旋转关节上,该后机械臂的另一端的上部安装有所述的第二旋转关节,在该第二旋转关节上安装有前臂变幅油缸底座,该前臂变幅油缸底座整体呈z字型设置,该前机械臂的一端通过后铰接座转动的安装所述的前臂变幅油缸底座的上部,另一端的上部安装有所述的第三旋转关节,在所述的第三旋转关节上安装有所述的组合关节,前臂变幅油缸的缸体铰接在所述的前臂变幅油缸底座的下部,在所述前机械臂的下部设置有前铰接座,该前臂变幅油缸的活塞杆与所述的前铰接座铰接在一起。
6.所述的组合关节包括第四旋转关节和第五旋转关节,该第五旋转关节安装在所述第四旋转关节的上部,并与所述的第四旋转关节垂直设置。
7.所述的第一旋转关节、第二旋转关节、第三旋转关节和第四旋转关节和第五旋转关节的结构相同,均包括回转支撑、旋转盘和驱动马达,所述的旋转盘转动的安装在所述的回转支撑上,该旋转盘通过安装在回转支撑上的驱动马达驱动,所述的第一旋转关节、第二旋转关节和第三旋转关节的旋转面均沿x轴所在的平面进行旋转;所述的第四旋转关节沿z轴所在的平面旋转,所述的第五旋转关节沿y轴所在的平面旋转。
8.本实用新型的优点是:通过第一旋转关节、第二旋转关节和第三旋转关节实现沿x轴所在的平面进行旋转;通过第四旋转关节沿z轴所在的平面旋转,第五旋转关节沿y轴所在的平面旋转;组合关节在使用时通过螺栓连接钻锚机机身,组合关节两向的调整,使钻锚机身产生两轴运动;前臂变幅油缸工作时驱动前机械臂上下移动,实现了多方位移动,运动范围广,可到达位置更精准。
附图说明
9.图1是本实用新型的主体结构示意图。
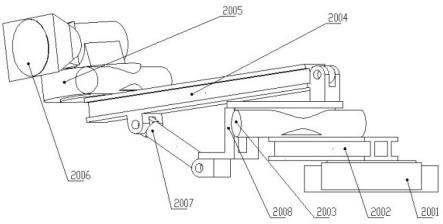
10.图2是图1的俯视图。
11.图3是图1的另一视角示意图。
12.其中,第一旋转关节2001;后机械臂2002;第二旋转关节2003;前机械臂2004;第三旋转关节2005;组合关节2006;前臂变幅油缸2007;前臂变幅油缸底座2008;第四旋转关节2009;第五旋转关节2010。
具体实施方式
13.下面结合具体实施例来进一步描述本实用新型,本实用新型的优点和特点将会随着描述而更为清楚。但这些实施例仅是范例性的,并不对本实用新型的范围构成任何限制。本领域技术人员应该理解的是,在不偏离本实用新型的精神和范围下可以对本实用新型技术方案的细节和形式进行修改或替换,但这些修改和替换均落入本实用新型的保护范围内。
14.参见图1至图3,本实用新型涉及一种全自动钻锚机器人的六轴机械臂,包括前机械臂2004、后机械臂2002、第一旋转关节2001、第二旋转关节2003、第三旋转关节2005和组合关节2006,所述的后机械臂2002的一端的下部安装在所述的第一旋转关节2001上,该后机械臂2002的另一端的上部安装有所述的第二旋转关节2003,在该第二旋转关节2003上安装有前臂变幅油缸底座2008,该前臂变幅油缸底座2008整体呈z字型设置,该前机械臂2004的一端通过后铰接座转动的安装所述的前臂变幅油缸底座2008的上部,另一端的上部安装有所述的第三旋转关节2005,在所述的第三旋转关节2005上安装有所述的组合关节2006,前臂变幅油缸2007的缸体铰接在所述的前臂变幅油缸底座2008的下部,在所述前机械臂2004的下部设置有前铰接座,该前臂变幅油缸2007的活塞杆与所述的前铰接座铰接在一起。
15.所述的组合关节2006包括第四旋转关节2009和第五旋转关节2010,该第五旋转关节2010安装在所述第四旋转关节2009的上部,并与所述的第四旋转关节2009垂直设置。
16.所述的第一旋转关节2001、第二旋转关节2003、第三旋转关节2005、第四旋转关节2009和第五旋转关节2010的结构相同,均包括回转支撑、旋转盘和驱动马达,所述的旋转盘转动的安装在所述的回转支撑上,该旋转盘通过安装在回转支撑上的驱动马达驱动,所述的第一旋转关节2001、第二旋转关节2003和第三旋转关节2005的旋转面均沿x轴所在的平面进行旋转;所述的第四旋转关节2009沿z轴所在的平面旋转,所述的第五旋转关节2010沿y轴所在的平面旋转。
17.本实用新型的工作原理是:
18.1、六轴机械臂的后机械臂2002通过螺栓固定在第一旋转关节2001上面,后机械臂2002随着第一旋转关节2001转动;
19.2、六轴机械臂的第二旋转关节2003通过螺栓固定在后机械臂2002上面,前臂变幅油缸底座2008通过螺栓固定在第二旋转关节2003上面,随着第二旋转关节2003进行转动;
20.3、六轴机械臂的前机械臂2004的后部与前臂变幅油缸底座2008铰接,前部与前臂变幅油缸2007的活塞杆铰接在一起;在前臂变幅油缸2007伸缩时,该前机械臂2004在前臂变幅底座2008铰接处转动,另一端随着前臂变幅油缸2007的伸缩,围绕铰接点升降变幅;
21.4、第三旋转关节2005通过螺栓固定在前机械臂2004的另一端;组合关节2006通过
螺栓固定在第三旋转关节2005上面,组合关节随第三旋转关节2005转动而转动;
22.5、组合关节通过螺栓连接钻机机身,组合关节2006两向的调整,使钻锚机身产生两轴运动。
23.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种全自动钻锚机器人的六轴机械臂,其特征在于,包括前机械臂、后机械臂、第一旋转关节、第二旋转关节、第三旋转关节和组合关节,所述的后机械臂的一端的下部安装在所述的第一旋转关节上,该后机械臂的另一端的上部安装有所述的第二旋转关节,在该第二旋转关节上安装有前臂变幅油缸底座,该前臂变幅油缸底座整体呈z字型设置,该前机械臂的一端通过后铰接座转动的安装所述的前臂变幅油缸底座的上部,另一端的上部安装有所述的第三旋转关节,在所述的第三旋转关节上安装有所述的组合关节,前臂变幅油缸的缸体铰接在所述的前臂变幅油缸底座的下部,在所述前机械臂的下部设置有前铰接座,该前臂变幅油缸的活塞杆与所述的前铰接座铰接在一起。2.根据权利要求1所述的一种全自动钻锚机器人的六轴机械臂,其特征在于,所述的组合关节包括第四旋转关节和第五旋转关节,该第五旋转关节安装在所述第四旋转关节的上部,并与所述的第四旋转关节垂直设置。3.根据权利要求2所述的一种全自动钻锚机器人的六轴机械臂,其特征在于,所述的第一旋转关节、第二旋转关节、第三旋转关节、第四旋转关节和第五旋转关节的结构相同,均包括回转支撑、旋转盘和驱动马达,所述的旋转盘转动的安装在所述的回转支撑上,该旋转盘通过安装在回转支撑上的驱动马达驱动,所述的第一旋转关节、第二旋转关节和第三旋转关节的旋转面均沿x轴所在的平面进行旋转;所述的第四旋转关节沿z轴所在的平面旋转,所述的第五旋转关节沿y轴所在的平面旋转。
技术总结
本实用新型涉及一种全自动钻锚机器人的六轴机械臂,属于钻锚领域,包括前机械臂、后机械臂、第一旋转关节、第二旋转关节、第三旋转关节和组合关节,所述的后机械臂的一端的下部安装在所述的第一旋转关节上,后机械臂的另一端的上部安装有所述的第二旋转关节,在第二旋转关节上安装有前臂变幅油缸底座。本实用新型的优点是:通过第一旋转关节、第二旋转关节和第三旋转关节实现沿X轴所在的平面进行旋转;通过第四旋转关节沿Z轴所在的平面旋转,第五旋转关节沿Y轴所在的平面旋转;组合关节在使用时通过螺栓连接钻锚机机身,组合关节两向的调整,使钻锚机身产生两轴运动;前臂变幅油缸工作时驱动前机械臂上下移动,实现了多方位移动。动。动。
技术研发人员:刘艺璇 查俊杰 查传金 宁亚飞
受保护的技术使用者:山东星河工业科技有限公司
技术研发日:2023.02.13
技术公布日:2023/3/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1