一种工业机械手的制作方法
本技术涉及机械手,具体涉及一种工业机械手。
背景技术:
1、工业机械手是在机械化和自动化生产中一种新型的机械设备,在自动化生产过程中使用一种具有抓取和移动的自动化设备,主要是能在生产过程中模拟人的动作来完成工作,像可代替人员搬运重大物件或进入高温、有毒、易爆炸和具有放射性等环境中去工作,代替人完成危险、枯燥的工作,相对减轻人力劳动强度,提高劳动生产力。
2、现有的工业机械手在夹持大型环形结构件时,稳定性较差,难以将大型环形结构件顺利对齐到安装位置上。
技术实现思路
1、本实用新型的目的在于克服现有技术的不足,本实用新型提供了一种工业机械手,可平移、旋转,并且拥有两个臂主体,能稳定夹持住大型环形结构件,将其顺利对齐到安装位置上。
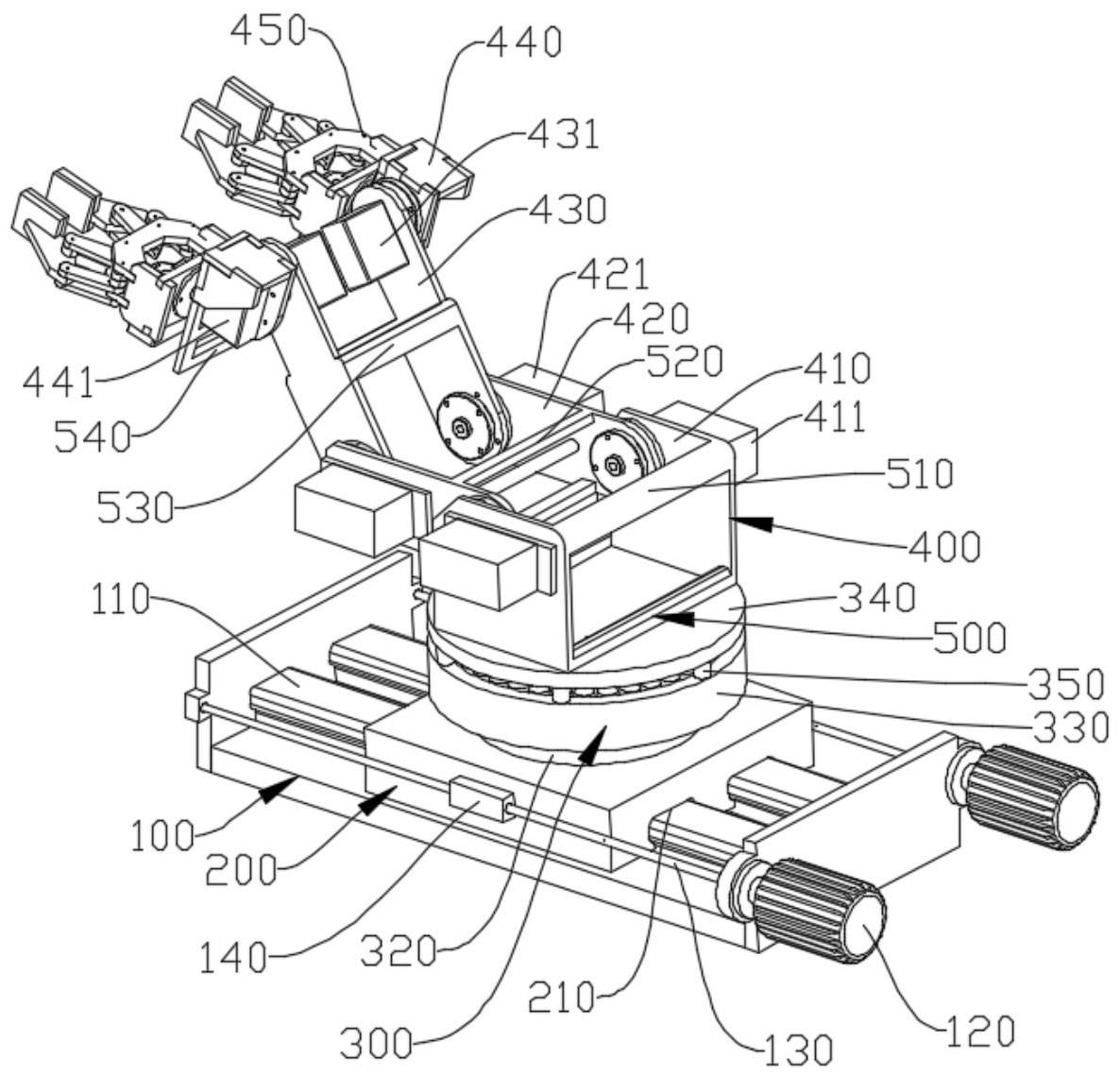
2、本实用新型提供了一种工业机械手,所述工业机械手包括导轨座、安装在所述导轨座上的滑块座、安装在所述滑块座上的旋转座和安装在所述旋转座上的两个臂主体,两个所述臂主体左右对称设置,两个所述臂主体之间基于连杆固定连接;
3、任一所述臂主体包括依次转动连接的基臂、大臂、小臂、腕关节和机械爪,所述基臂固定设置在所述旋转座上,所述基臂固定设置有第一电机,所述第一电机的输出轴与所述大臂固定连接,所述大臂固定设置有第二电机,所述第二电机的输出轴与所述小臂固定连接,所述小臂固定设置有第三电机,所述第三电机的输出轴与所述腕关节固定连接,所述腕关节固定设置有第四电机,所述第四电机的输出轴与所述机械爪固定连接。
4、具体的,所述机械爪为二指夹爪。
5、具体的,所述连杆包括第一连杆、第二连杆、第三连杆和第四连杆,两个所述基臂之间基于所述第一连杆固定连接,两个所述大臂之间基于所述第二连杆固定连接,两个所述小臂之间基于所述第三连杆固定连接,两个所述腕关节之间基于所述第四连杆固定连接。
6、具体的,所述导轨座固定设置有两条平行的导轨,所述滑块座对应开设有两条平行的滑槽,所述导轨和所述滑槽滑动配合。
7、具体的,所述导轨上涂抹有润滑油或润滑脂。
8、具体的,所述导轨座设置有滑块座驱动机构,所述滑块座驱动机构包括第五电机、丝杠轴和丝杠滑块,所述丝杠轴转动设置在所述导轨座上,所述丝杠轴与所述导轨平行;所述第五电机固定设置在所述导轨座上,所述第五电机的输出轴与所述丝杠轴固定连接;所述丝杠滑块固定设置在所述滑块座的侧面,所述丝杠轴穿设在所述丝杠滑块中,所述丝杠轴与所述丝杠滑块基于螺纹配合。
9、具体的,所述滑块座驱动机构有两套,两套所述滑块座驱动机构对称分布在所述滑块座的两侧。
10、具体的,所述旋转座包括第六电机、内环体、外环体和承载盘,所述第六电机位于所述内环体的内侧,所述第六电机与所述滑块座固定连接,所述第六电机的输出轴与所述承载盘固定连接,所述内环体与所述滑块座固定连接,所述外环体与所述承载盘基于连接柱固定连接,所述外环体套设在所述内环体外,所述外环体与所述内环体滑动配合,所述臂主体安装在所述承载盘上。
11、具体的,所述外环体与所述内环体之间设置有滚柱或滚珠。
12、具体的,所述外环体与所述内环体之间涂抹有润滑油或润滑脂。
13、与现有技术相比,本实用新型的有益效果是:
14、本实用新型的工业机械手中,滑块座可在导轨座上滑动,获得平移距离;旋转座可以转动,使两个臂主体获得旋转角度;两个臂主体左右对称分布,并且两个臂主体基于连杆固定连接,任一臂主体包括依次转动连接的基臂、大臂、小臂、腕关节和机械爪,每个转动连接部位均设置有电机驱动,转动灵活、强劲有力;两个臂主体共同配合可以稳定地夹持住大型环形结构件,再配合导轨座、滑块座以及旋转座,能将大型环形结构件顺利对齐到安装位置上。
技术特征:
1.一种工业机械手,其特征在于,所述工业机械手包括导轨座、安装在所述导轨座上的滑块座、安装在所述滑块座上的旋转座和安装在所述旋转座上的两个臂主体,两个所述臂主体左右对称设置,两个所述臂主体之间基于连杆固定连接;
2.如权利要求1所述的工业机械手,其特征在于,所述机械爪为二指夹爪。
3.如权利要求1所述的工业机械手,其特征在于,所述连杆包括第一连杆、第二连杆、第三连杆和第四连杆,两个所述基臂之间基于所述第一连杆固定连接,两个所述大臂之间基于所述第二连杆固定连接,两个所述小臂之间基于所述第三连杆固定连接,两个所述腕关节之间基于所述第四连杆固定连接。
4.如权利要求1所述的工业机械手,其特征在于,所述导轨座固定设置有两条平行的导轨,所述滑块座对应开设有两条平行的滑槽,所述导轨和所述滑槽滑动配合。
5.如权利要求4所述的工业机械手,其特征在于,所述导轨上涂抹有润滑油或润滑脂。
6.如权利要求4所述的工业机械手,其特征在于,所述导轨座设置有滑块座驱动机构,所述滑块座驱动机构包括第五电机、丝杠轴和丝杠滑块,所述丝杠轴转动设置在所述导轨座上,所述丝杠轴与所述导轨平行;所述第五电机固定设置在所述导轨座上,所述第五电机的输出轴与所述丝杠轴固定连接;所述丝杠滑块固定设置在所述滑块座的侧面,所述丝杠轴穿设在所述丝杠滑块中,所述丝杠轴与所述丝杠滑块基于螺纹配合。
7.如权利要求6所述的工业机械手,其特征在于,所述滑块座驱动机构有两套,两套所述滑块座驱动机构对称分布在所述滑块座的两侧。
8.如权利要求1所述的工业机械手,其特征在于,所述旋转座包括第六电机、内环体、外环体和承载盘,所述第六电机位于所述内环体的内侧,所述第六电机与所述滑块座固定连接,所述第六电机的输出轴与所述承载盘固定连接,所述内环体与所述滑块座固定连接,所述外环体与所述承载盘基于连接柱固定连接,所述外环体套设在所述内环体外,所述外环体与所述内环体滑动配合,所述臂主体安装在所述承载盘上。
9.如权利要求8所述的工业机械手,其特征在于,所述外环体与所述内环体之间设置有滚柱或滚珠。
10.如权利要求8所述的工业机械手,其特征在于,所述外环体与所述内环体之间涂抹有润滑油或润滑脂。
技术总结
本技术公开了一种工业机械手,涉及机械手技术领域,包括导轨座、安装在导轨座上的滑块座、安装在滑块座上的旋转座和安装在旋转座上的两个臂主体,两个臂主体左右对称,两个臂主体基于连杆固定连接;任一臂主体包括依次转动连接的基臂、大臂、小臂、腕关节和机械爪,基臂固定在旋转座上,基臂固定有第一电机,第一电机的输出轴与大臂固定连接,大臂固定有第二电机,第二电机的输出轴与小臂固定连接,小臂固定有第三电机,第三电机的输出轴与腕关节固定连接,腕关节固定有第四电机,第四电机的输出轴与机械爪固定连接。本技术的工业机械手,可平移、旋转,有两个臂主体,能稳定夹持大型环形结构件,将其顺利对齐到安装位置上。
技术研发人员:徐路升,谢应胜,黄志映
受保护的技术使用者:工业富联(佛山)产业示范基地有限公司
技术研发日:20230717
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!