一种机器人搬运夹爪的制作方法
本技术涉及轨道交通用减震器夹持装置,尤其涉及一种机器人搬运夹爪。
背景技术:
1、随着轨道交通的不断发展,人们对乘坐轨道交通车辆时的舒适度有了更高的要求,减震器的发明解决了这一问题,为了使车辆行驶更加平顺,大多数车辆的悬架系统内部装有减震器,其中筒式减震器是较为常见的一种减震器类型。筒式减震器包括工作缸体、滑动安装在工作缸体内的活塞杆以及连接在活塞杆上的防尘罩。轨道车辆进行检修期间,需要对减震器进行性能检测,将其放入测试机中进行测试,由于需要进行检测的减震器长度不同,为了方便检测,在进行测试之前,需要先将减震器放入整形机构进行整形,即对减震器进行拉伸或压缩以将其调整至统一长度,之后再将调整过长度的减震器搬运至测试机上进行测试。
2、授权公告号为cn217620656u的专利公开了一种减震器套筒加工用机械手抓取机构,该专利包括基座,基座的两端可拆卸连接有双头气缸,双头气缸的两个伸缩端连接有夹板,夹板的内壁连接有橡胶垫。该专利可以通过夹板夹紧在减震器套筒的外侧壁上,以实现对减震器套筒的抓取。但该专利仅适合用于抓取减震器套筒,若用于抓取减震器进行搬运时,该专利仅能对减震器中的工作缸体或防尘罩的其中一个进行夹持,这样在重力作用下,减震器中未被夹持的部分会下滑,最终导致减震器在转移过程中长度发生改变,难以与测试机相匹配。
技术实现思路
1、本实用新型提供一种机器人搬运夹爪,以解决现有技术中的机械抓手在用于抓取减震器进行转移时,难以使减震器的长度保持不变的技术问题。
2、为解决上述问题,本实用新型提供的一种机器人搬运夹爪采用如下技术方案:
3、一种机器人搬运夹爪,包括:
4、底座,用于与机械手连接;
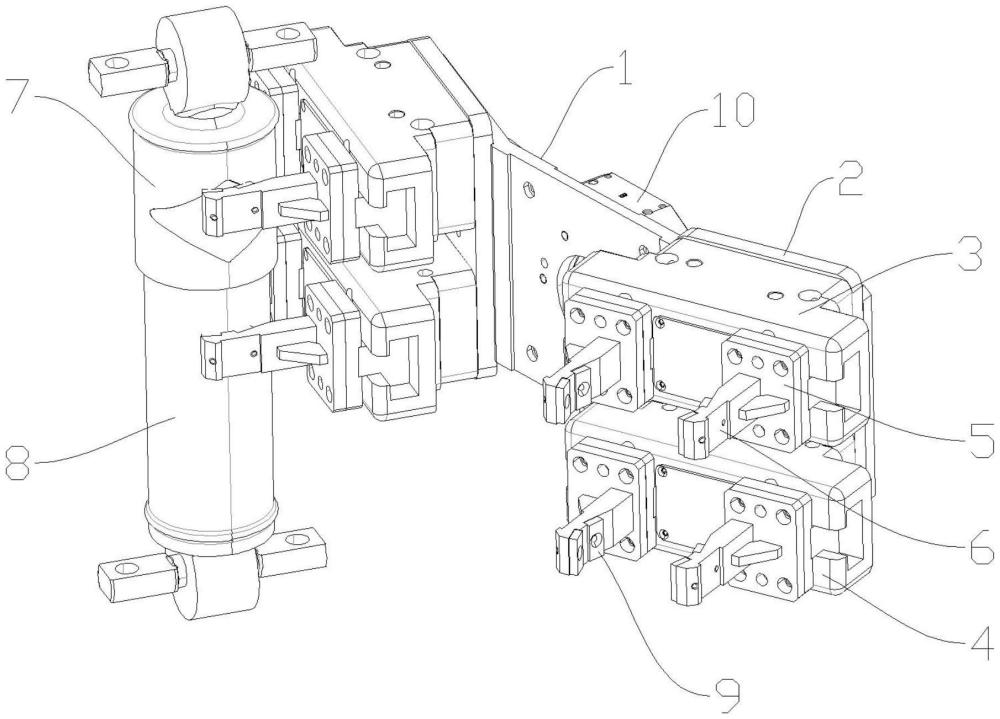
5、所述底座上安装有上下间隔分布用于夹持工件的第一双头气缸和第二双头气缸,所述第一双头气缸用于夹持工件的防尘罩,所述第二双头气缸用于夹持工件的工作缸体,以防止在搬运中防尘罩与工作缸体发生相对位移;
6、所述第一双头气缸具有两个可沿左右方向相对滑动的移动头,移动头上设有用于夹持工件的夹块,两移动头在其滑动行程上具有夹持位和解除位,处于夹持位的两个移动头上的夹块与工件的防尘罩紧贴以夹持工件;处于解除位的两个移动头上的夹块与工件分离以解除对工件的夹持;
7、所述第二双头气缸的结构与第一双头气缸的结构相同。
8、上述技术方案的有益效果是:底座上设有上下间隔分布的第一双头气缸和第二双头气缸,第一双头气缸上的两夹块夹持住减震器中的防尘罩,第二双头气缸上的两夹块夹持住减震器中的工作缸体,能够相对滑动的防尘罩与工作缸体均被夹紧固定,在转移过程中,不会出现防尘罩或工作缸体在重力作用下发生相对滑动而导致减震器长度发生变化的问题。
9、进一步的,各夹块均为v型块,其具有v形口,每个双头气缸上的两夹块的v形口相对设置。
10、上述技术方案的有益效果是:夹块为v型块,压块压设在减震器上时,可以确保每个夹块均与减震器外侧壁具有两个对称的接触点,夹块对减震器的压紧力可以指向减震器的轴心,使减震器受到充分约束,保证减震器能够被夹紧而不发生滑移。
11、进一步的,各夹块的v形口处均设有柔性垫片,柔性垫片背离对应的夹块的一侧壁面形成v形夹紧面,v形夹紧面紧贴减震器的外侧壁。
12、上述技术方案的有益效果是:夹块的v形口处连接有柔性垫片,使柔性垫片压紧在减震器上,夹块不与减震器直接接触,避免对减震器的表面造成损伤。
13、进一步的,所述底座包括连接板与对称连接在连接板两侧的安装板,所述连接板用于与机械手连接,两块安装板上均安装有上下间隔分布的第一双头气缸和第二双头气缸。
14、上述技术方案的有益效果是:底座包括两块安装板,两块安装板上均安装有上下间隔分布的第一双头气缸和第二双头气缸,使一个底座上可以同时夹取两个减震器,提高转移效率。
15、进一步的,两块所述安装板之间呈钝角夹角。
16、进一步的,每块安装板与连接板之间均连接有加强筋。
17、上述技术方案的有益效果是:加强筋使安装板与连接板之间的连接更加牢固。
18、进一步的,所述安装板上均连接有固定板,所述固定板上安装有上下间隔分布的第一双头气缸和第二双头气缸。
19、上述技术方案的有益效果是:第一双头气缸和第二双头气缸通过固定板安装在连接板上,通过更换不同的固定板,可以安装不同型号的双头气缸以夹持不同外径尺寸的减震器,适用范围更广;同时,第一双头气缸和第二双头气缸均安装在固定板上,在进行拆卸时,只需将固定板从安装板拆下,即可同时将第一双头气缸和第二双头气缸拆下,对第一双头气缸与第二双头气缸的拆卸更加便捷迅速。
20、进一步的,所述连接板上连接有快换接头,所述连接板通过快换接头与机械手连接。
21、上述技术方案的有益效果是:使用快换接头,可以提高该夹爪与机械手的连接速度与连接准确度;通过更换快换接头,可以使机械手能够适用于不同型号的夹爪。
22、进一步的,各双头气缸的进气口处均安装有单向阀。
23、上述技术方案的有益效果是:双头气缸的进气口处设有单向阀,使气体只能够单向流动,这样在气源故障而无法供气时,夹爪也不会突然松开,避免被夹紧的工件掉落。
技术特征:
1.一种机器人搬运夹爪,其特征在于,包括:
2.根据权利要求1所述的一种机器人搬运夹爪,其特征在于,各夹块均为v型块,其具有v形口,每个双头气缸上的两夹块的v形口相对设置。
3.根据权利要求2所述的一种机器人搬运夹爪,其特征在于,各夹块的v形口处均设有柔性垫片,柔性垫片背离对应的夹块的一侧壁面形成v形夹紧面,v形夹紧面紧贴减震器的外侧壁。
4.根据权利要求1-3中任一项所述的一种机器人搬运夹爪,其特征在于,所述底座包括连接板与对称连接在连接板两侧的安装板,所述连接板用于与机械手连接,两块安装板上均安装有上下间隔分布的第一双头气缸和第二双头气缸。
5.根据权利要求4所述的一种机器人搬运夹爪,其特征在于,两块所述安装板之间呈钝角夹角。
6.根据权利要求5所述的一种机器人搬运夹爪,其特征在于,每块安装板与连接板之间均连接有加强筋。
7.根据权利要求4所述的一种机器人搬运夹爪,其特征在于,所述安装板上均连接有固定板,所述固定板上安装有上下间隔分布的第一双头气缸和第二双头气缸。
8.根据权利要求5-7中任一项所述的一种机器人搬运夹爪,其特征在于,所述连接板上连接有快换接头,所述连接板通过快换接头与机械手连接。
9.根据权利要求5-7中任一项所述的一种机器人搬运夹爪,其特征在于,
技术总结
本技术涉及一种机器人搬运夹爪,解决了现有技术中的机械抓手在抓取减震器进行转移时,难以使减震器的长度保持不变的技术问题。本技术包括底座,底座上安装有上下间隔分布的第一双头气缸和第二双头气缸,第一双头气缸用于夹持工件的防尘罩,第二双头气缸用于夹持工件的工作缸体,以防止在搬运中防尘罩与工作缸体发生相对位移;第一双头气缸具有两个可沿左右方向相对滑动的移动头,移动头上设有用于夹持工件的夹块,两移动头在其滑动行程上具有夹持位和解除位,处于夹持位的两个移动头上的夹块与工件的防尘罩紧贴以夹持工件;处于解除位的两个移动头上的夹块与工件分离以解除对工件的夹持;第二双头气缸的结构与第一双头气缸的结构相同。
技术研发人员:范乐超,马贵敏,张东桥,李玮,古学传
受保护的技术使用者:广州松兴电气股份有限公司
技术研发日:20230904
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!