一种六维力传感器及工业机器人的制作方法
本发明涉及机器人,尤其涉及一种六维力传感器及工业机器人。
背景技术:
1、现有技术中,六维力传感器一般一端连接机械手的末端关节,另一端连接末端执行器,六维力传感器一般预留很长的线束与末端关节进行连接,一方面,导致六维力传感器轴向尺寸相对较大;另一方面,在将六维力传感器安装于机械手的末端关节时,需要将末端关节拆开,然后将线束与末端关节内部的接口进行连接,安装维护较复杂。
2、基于此,亟需一种六维力传感器及工业机器人,以解决上述存在的问题。
技术实现思路
1、基于以上所述,本发明的目的在于提供一种六维力传感器及工业机器人,降低了六维力传感器的轴向尺寸,提高了六维力传感器与关节的组装便捷性。
2、为达上述目的,本发明采用以下技术方案:
3、一方面,提供一种六维力传感器,包括壳体和电路板,所述壳体的第一端设置有第一安装槽,所述电路板嵌设且安装于所述第一安装槽内,所述电路板远离所述第一安装槽的槽底一侧设置有端口;所述壳体的第一端能够连接于关节,且所述端口用于与所述关节电连接。
4、作为一种六维力传感器的优选技术方案,还包括弹性体和控制板,所述壳体的第二端设置有第二安装槽,所述弹性体嵌设且安装于所述第二安装槽内,所述弹性体靠近所述第二安装槽的槽底的一端设置有容纳槽,所述控制板嵌设且安装于所述容纳槽内。
5、作为一种六维力传感器的优选技术方案,所述容纳槽的侧壁间隔设置有多个工艺孔,以使所述容纳槽的侧壁形成多个变形梁,所述变形梁的表面贴覆有应变片,所述应变片用于感应所述弹性体的形变,所述应变片电性连接于所述控制板。
6、作为一种六维力传感器的优选技术方案,所述弹性体背离所述第二安装槽的槽底的一端设置有法兰凸台,所述法兰凸台上环设有多个用于连接执行器的第一螺纹孔。
7、作为一种六维力传感器的优选技术方案,还包括多个限位螺钉,所述第二安装槽的侧壁设置有多个限位孔,所述弹性体的侧壁设置有多个第二螺纹孔,所述限位螺钉、所述限位孔和所述第二螺纹孔一一对应,所述限位螺钉穿设于所述限位孔且螺纹连接于所述第二螺纹孔,所述限位孔的直径大于所述限位螺钉的杆部的直径,以限制所述弹性体的最大形变量。
8、作为一种六维力传感器的优选技术方案,所述限位孔为阶梯孔,所述限位孔包括大径孔段和小径孔段,所述限位螺钉的头部嵌设于所述大径孔段内,所述限位螺钉的杆部穿设于所述小径孔段,所述大径孔段的直径大于所述限位螺钉的头部的直径,所述小径孔段的直径大于所述限位螺钉的杆部的直径。
9、作为一种六维力传感器的优选技术方案,还包括装饰板,所述装饰板安装于所述壳体的外壁,所述装饰板用于遮挡所述限位孔。
10、作为一种六维力传感器的优选技术方案,还包括密封圈,所述第二安装槽的侧壁与所述弹性体之间设置有第一间隙,所述密封圈密封连接于所述壳体的第二端,所述密封圈用于密封所述第一间隙远离所述第二安装槽的槽底的一端。
11、作为一种六维力传感器的优选技术方案,所述第一安装槽的槽底设置有通孔,所述第二安装槽的侧壁设置有多个安装孔,所述安装孔用于安装按钮和/或接口,所述按钮和所述接口通过线束穿设所述通孔且电连接于所述电路板远离所述端口的一侧。
12、另一方面,提供一种工业机器人,包括关节、执行器和以上任一方案所述的六维力传感器,所述六维力传感器一端连接于所述关节,另一端连接于所述执行器。
13、本发明的有益效果为:
14、本发明提供一种六维力传感器及工业机器人,由于电路板和端口嵌设在第一安装槽内,形成下沉式端口的结构,降低了六维力传感器的轴向尺寸;再者,由于预留了连接关节的端口,端口可与关节直接电连接,安装简便,进一步提高了机器人零部件的模块化水平;最后,下沉式端口的结构能够确保壳体的第一端的平整度,便于壳体的第一端与关节连接。
技术特征:
1.一种六维力传感器,其特征在于,包括壳体(1)和电路板(2),所述壳体(1)的第一端设置有第一安装槽(11),所述电路板(2)嵌设且安装于所述第一安装槽(11)内,所述电路板(2)远离所述第一安装槽(11)的槽底一侧设置有端口(21);所述壳体(1)的第一端能够连接于关节,且所述端口(21)用于与所述关节电连接。
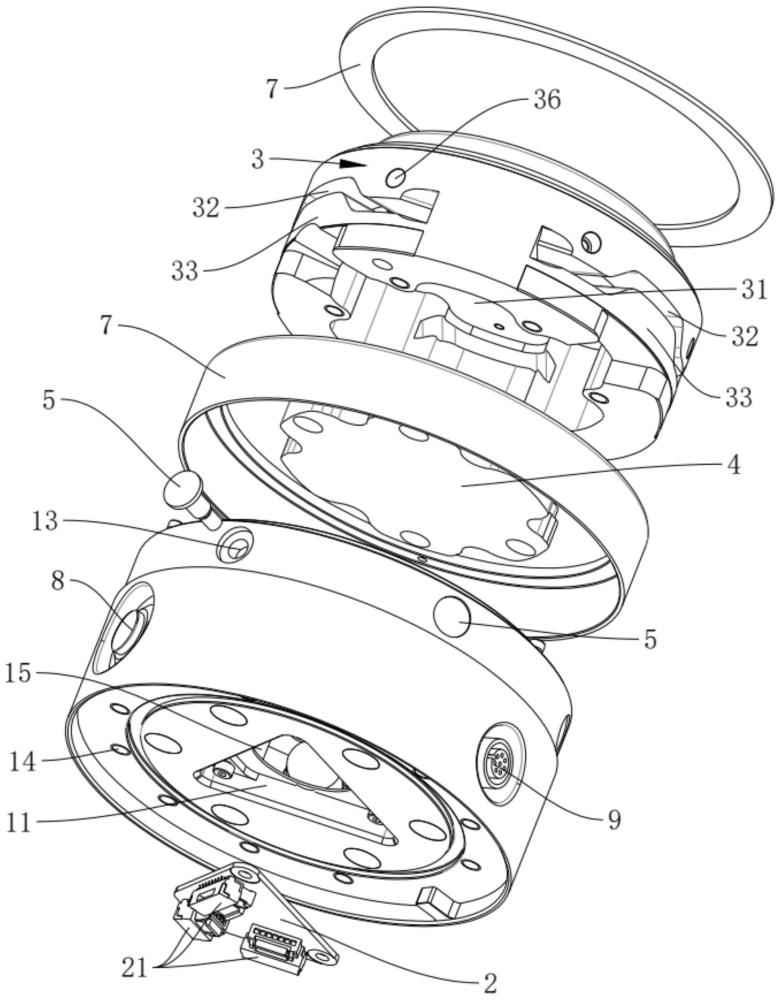
2.根据权利要求1所述的六维力传感器,其特征在于,还包括弹性体(3)和控制板(4),所述壳体(1)的第二端设置有第二安装槽(12),所述弹性体(3)嵌设且安装于所述第二安装槽(12)内,所述弹性体(3)靠近所述第二安装槽(12)的槽底的一端设置有容纳槽(31),所述控制板(4)嵌设且安装于所述容纳槽(31)内。
3.根据权利要求2所述的六维力传感器,其特征在于,所述容纳槽(31)的侧壁间隔设置有多个工艺孔(32),以使所述容纳槽(31)的侧壁形成多个变形梁(33),所述变形梁(33)的表面贴覆有应变片,所述应变片用于感应所述弹性体(3)的形变,所述应变片电性连接于所述控制板(4)。
4.根据权利要求2所述的六维力传感器,其特征在于,所述弹性体(3)背离所述第二安装槽(12)的槽底的一端设置有法兰凸台(34),所述法兰凸台(34)上环设有多个用于连接执行器的第一螺纹孔(35)。
5.根据权利要求2所述的六维力传感器,其特征在于,还包括多个限位螺钉(5),所述第二安装槽(12)的侧壁设置有多个限位孔(13),所述弹性体(3)的侧壁设置有多个第二螺纹孔(36),所述限位螺钉(5)、所述限位孔(13)和所述第二螺纹孔(36)一一对应,所述限位螺钉(5)穿设于所述限位孔(13)且螺纹连接于所述第二螺纹孔(36),所述限位孔(13)的直径大于所述限位螺钉(5)的杆部的直径,以限制所述弹性体(3)的最大形变量。
6.根据权利要求5所述的六维力传感器,其特征在于,所述限位孔(13)为阶梯孔,所述限位孔(13)包括大径孔段和小径孔段,所述限位螺钉(5)的头部嵌设于所述大径孔段内,所述限位螺钉(5)的杆部穿设于所述小径孔段,所述大径孔段的直径大于所述限位螺钉(5)的头部的直径,所述小径孔段的直径大于所述限位螺钉(5)的杆部的直径。
7.根据权利要求5所述的六维力传感器,其特征在于,还包括装饰板(6),所述装饰板(6)安装于所述壳体(1)的外壁,所述装饰板(6)用于遮挡所述限位孔(13)。
8.根据权利要求2所述的六维力传感器,其特征在于,还包括密封圈(7),所述第二安装槽(12)的侧壁与所述弹性体(3)之间设置有第一间隙(16),所述密封圈(7)密封连接于所述壳体(1)的第二端,所述密封圈(7)用于密封所述第一间隙(16)远离所述第二安装槽(12)的槽底的一端。
9.根据权利要求2所述的六维力传感器,其特征在于,所述第一安装槽(11)的槽底设置有通孔(15),所述第二安装槽(12)的侧壁设置有多个安装孔,所述安装孔用于安装按钮(8)和/或接口(9),所述按钮(8)和所述接口(9)通过线束穿设所述通孔(15)且电连接于所述电路板(2)远离所述端口(21)的一侧。
10.一种工业机器人,其特征在于,包括关节、执行器和如权利要求1-9任一项所述的六维力传感器,所述六维力传感器一端连接于所述关节,另一端连接于所述执行器。
技术总结
本发明涉及机器人技术领域,公开一种六维力传感器及工业机器人。其中六维力传感器包括壳体和电路板,所述壳体的第一端设置有第一安装槽,所述电路板嵌设且安装于所述第一安装槽内,所述电路板远离所述第一安装槽的槽底一侧设置有端口;所述壳体的第一端能够连接于关节,且所述端口用于与所述关节电连接。其中,由于电路板和端口嵌设在第一安装槽内,形成下沉式端口的结构,降低了六维力传感器的轴向尺寸;再者,由于预留了连接关节的端口,端口可与关节直接电连接,安装简便,进一步提高了机器人零部件的模块化水平;最后,下沉式端口的结构能够确保壳体的第一端的平整度,便于壳体的第一端与关节连接。
技术研发人员:杨帆,李明洋,翟嘉心,张立帅
受保护的技术使用者:节卡机器人股份有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!