一种多自由度软体臂
本发明涉及机械结构领域,具体为一种多自由度软体臂。
背景技术:
1、随着我国生产力的快速发展,软体机械臂被广泛应用于工业物品抓取、流水线作业、空间探测、医疗辅助等需要准确传导与灵活控制的特定场景中,但传统的软体臂存在自由度低、装配维护复杂且成本高等问题,一定程度上使控制效率、应用场景受到限制。而采用组合式软体管及模块化连接件设计可以提高自由度,实现多角度的空间运动,并极大地延伸了应用场景。
技术实现思路
1、针对上述情况,本发明提供了一种多自由度软体臂,有效提高了软体臂自由度,解决了传统软体臂装配维护复杂、维护成本高及应用场景局限的问题。
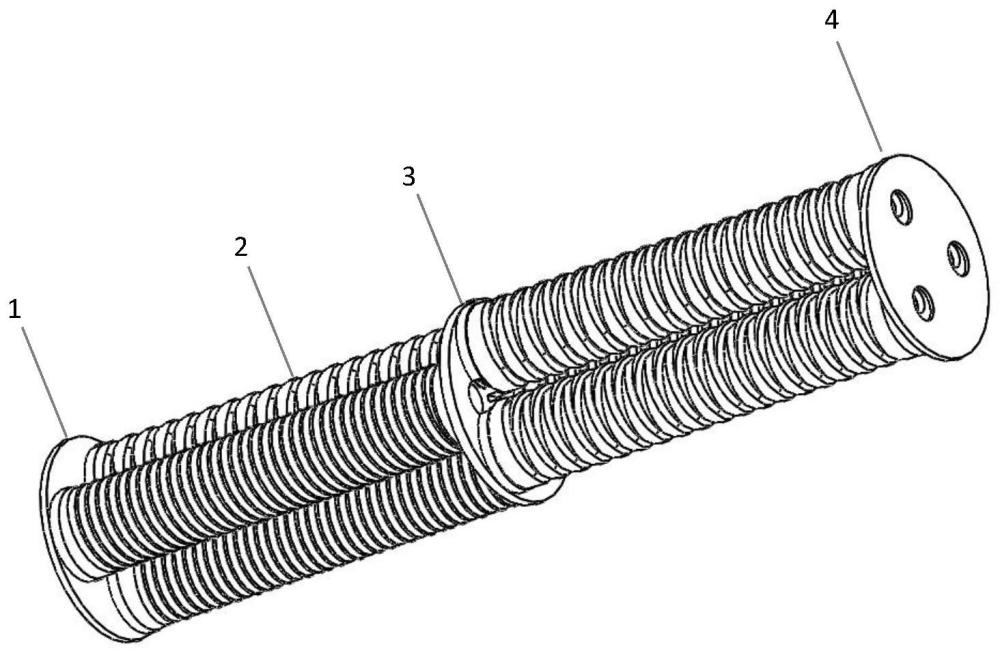
2、为实现上述目的,本发明所提供的技术方案为:提供一种多自由度软体臂,包括封闭端连接件、软体管、连接端连接件和开端连接件,所述封闭端连接件包括第一模块封闭口和封闭端连接盘,所述封闭端连接件用于防止软体臂内气体逸出;所述软体管包括伸缩管、顺时针弯曲管和逆时针弯曲管,所述软体管用于实现软体臂的运动;所述连接端连接件包括第一模块充气口、第二模块封闭口和连接端连接盘,所述连接端连接件用于固定配合两段软体管;所述开端连接件包括开端连接盘和第二模块充气口,所述开端连接件用于给所述软体管的输送气体,并阻止软体管的气体从所述充气口输出。
3、软体管包括伸缩管、顺时针弯曲管和逆时针弯曲管,固定在连接件之间,用于实现一侧弯曲、顺时针缠绕和逆时针缠绕三个运动状态;
4、本发明的有益效果:
5、1、本申请实施例的多自由度软体臂,通过封闭端连接件、连接端连接件和开端连接件与两组软体管进行固定配合,封闭端连接件和连接端连接件的模块封闭口可以保证软体臂的气密性,连接端连接件和开端连接件的模块充气口可以实现对软体管的充气,通过调节每段软体管的进气量从而控制每段软体管的运动状态,两段软体臂可以进行独立运动和互相协作,能够提高空间自由度,实现多角度的空间运动。
6、2、在模块充气口和模块封闭口与连接盘的配合方式中,其连接方式均为螺旋式配合,连接盘的内部设置有螺旋凹槽,模块充气口和模块封闭口底端设置有螺旋凸槽,两者进行螺旋配合,模块化的设计降低了软体臂在装配维护上的人力、经济成本。
7、3、本申请实施例的多自由度软体臂包括伸缩管、顺时针弯曲管和逆时针弯曲管,三根不同的软体管互相并联,使其手臂可以实现一侧弯曲、顺时针缠绕和逆时针缠绕三个运动状态,实现360°的旋转运动。
技术特征:
1.一种多自由度软体臂,其特征在于,包括:
2.根据权利要求1所述的一种多自由度软体臂,其特征在于,所述连接端连接件(3)的第一模块充气口(31)底端设置第一螺旋凸槽(311),所述连接端连接件(3)的第二模块封闭口(32)底端设置第二螺旋凸槽(321);
3.根据权利要求1所述的一种多自由度软体臂,其特征在于,所述封闭端连接件(1)的第一模块封闭口(11)底端设置第四螺旋凹槽(111),所述封闭端连接件(1)的封闭端连接盘(12)设置第五螺旋凹槽(121),用于所述第一模块封闭口(11)和封闭端连接盘(12)的螺旋配合。
4.根据权利要求1所述的一种多自由度软体臂,其特征在于,
5.根据权利要求1所述的一种多自由度软体臂,其特征在于,所述开端连接件(4)的第二模块充气口(42)底端设置螺旋凸槽(421);
6.根据权利要求3所述的一种多自由度软体臂,其特征在于,所述软体管(2)的数量包括至少两组,两组所述软体管(2)设置于所述连接端连接件(3)两侧。
技术总结
本发明涉及机械结构领域,具体为一种多自由度软体臂,包括封闭端连接件、软体管、连接端连接件和开端连接件。封闭端连接件包括第一模块封闭口和封闭端连接盘,封闭端连接件用于防止软体臂内气体逸出;软体管包括伸缩管、顺时针弯曲管和逆时针弯曲管,软体管用于实现软体臂的运动;连接端连接件包括第一模块充气口、第二模块封闭口和连接端连接盘,连接端连接件用于固定配合两段软体管;开端连接件包括开端连接盘和第二模块充气口,开端连接件用于给软体管的输送气体,并阻止软体管的气体从充气口输出。使其手臂可以实现一侧弯曲、顺时针缠绕和逆时针缠绕三个状态,实现多角度的旋转运动。两段软体臂通过固定配合,独立运动和互相协作。
技术研发人员:章智超,吴小平
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!