基于纺织材料变刚度软体机械手及其使用方法
本发明涉及一种基于纺织材料变刚度软体机械手及其使用方法。
背景技术:
1、随着智能制造技术发展,机器人全自动化生产线越来越普及,而软体机器人以及软体机械手因其高度的环境自适应性和无限自由度的特点越来越引起关注。传统刚性机械手作业精度高、负载力大、响应速度快,已经广泛应用于各种高强度、高风险作业场合。对于微小型物品以及易碎、不规则物品的抓取作业,以及狭小、复杂环境等情况作业适应度差、作业效率低下,软体机械手由于软材料的柔顺性、环境亲合度等优点可以实现以上作业情况的无损抓取。但是软体机械手一般由对人体无害、环境亲和的硅胶、橡胶、水凝胶等材料制作而成,由于本体材料的柔顺性,无法实现相对较大的负载以及对相对较大尺寸物体的抓取。
2、且现有通用的基于快速气动网格型或者纤维约束型的软体机械手存在以下问题:
3、1. 传统软体机械手一般采用单一联通腔室设计,机械手整体弯曲程度与流体驱动压力呈现正相关关系,一般只能按照预设简单包络线变形,动作简单自由度单一,对复杂以及较重物体抓取能力相对较弱。
4、2. 抓取面光滑,摩擦力有限,经常容易在工业抓取过程中出现滑动现象,动态抓取稳定性相对较弱。
5、3. 传统软体机械手一般基于硅胶、pdms、tpu等材料注入3d打印模具浇筑成型,为了多样化功能,例如弯曲、缠绕、三维运动,需要制造相对复杂的浇筑模具来完成相对复杂的腔室结构,对浇筑工艺和模具制造工艺提出了挑战。
技术实现思路
1、本发明的目的在于提供一种基于纺织材料变刚度软体机械手及其使用方法,该机械手结构简单,可以实现更大尺度的抓取作业。
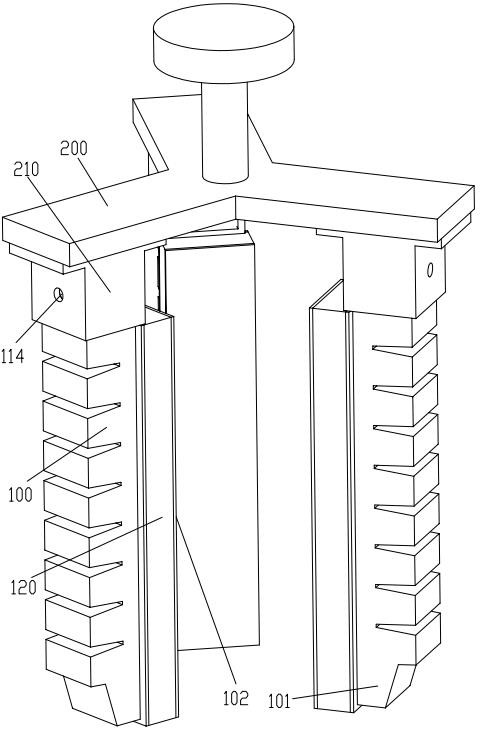
2、本发明的技术方案在于:一种基于纺织材料变刚度软体机械手,包括软体手指,所述软体手指内设置有变形机构,软体手指的内侧面设置有变刚度机构;所述变形机构包括设置于软体手指内并由多个连续的隆起腔体组成的腔室层,软体手指内靠近变刚度机构一侧设置有连通所有腔体的流道层,软体手指内还设置有用于封闭腔室层和流道层的限制层;所述变刚度机构包括设置于软体手指内侧面上的外膜壳,所述外膜壳内设置有纺织材料层,所述纺织材料层包括沿外膜壳内腔长度方向依次设置的若干组空心晶胞组件,相邻两空心晶胞组件之间经丝线相连接。
3、进一步地,还包括固定座板,所述固定座板的下侧经连接座安装有至少两根软体手指。
4、进一步地,所述软体手指的底部形成指尖抓取部位,所述变刚度机构的内侧面形成包络抓取部位。
5、进一步地,所述腔体呈直线排布于软体手指内,位于软体手指的上部侧壁设置有用于与流体控制系统相连接的流体进出口,所述流体进出口与流道层相连通。
6、进一步地,所述软体手指的内侧面形成接触层,所述接触层经粘合剂与外膜壳相连接。
7、进一步地,所述粘结剂为硅胶粘合剂。
8、进一步地,所述限制层材料为聚氯乙烯、热塑性聚氨酯弹性体或树脂;所述腔室层和流道层的材料均为聚二甲基硅氧烷或硅胶。
9、进一步地,所述外膜壳采用聚乙烯负压薄膜或硅胶薄膜制成;所述丝线为尼龙丝线。
10、进一步地,所述空心晶胞组件为多个金字塔形立方八面体空心互锁晶胞结构、六面体空心互锁晶胞结构、四面体空心互锁晶胞结构或空心圆环互锁晶胞结构组成,并由树脂材料经3d打印制作而成。
11、一种应用于基于纺织材料变刚度软体机械手的使用方法,步骤如下:
12、(1)当包络抓取大型且相对重量较轻的物品时:先输入负压流体使得软体机械手打开,通过外加软体或者刚性机械臂运动到准确的抓取位置;再输入正压流体驱动变形,此时不牵涉变刚度机构的变化;
13、(2)当指尖抓取重量轻的微小型不规则物品时:先输入负压流体使得软体机械手打开,通过外加软体或者刚性机械臂运动到准确的抓取位置,直接输入正压流体驱动软体机械手正压驱动部分变形完成,此时不牵涉变刚度机构的变化;
14、(3)当变刚度抓取时:通过流体控制系统根据抓取作业需要输入流体,将软体手指的常曲率变形到一个适当的作业范围;再启动负压流体管路部分对外膜壳进行抽取真空作业;抽取真空后,外膜壳内部的真空和外部的大气压形成一定的气压差,使纺织材料层发生挤压和互锁,限制移动空间增大整体机构的刚度;在此基础上进一步输入流体驱动变形机构变形,完成相对较重物品的抓取作业。
15、与现有技术相比较,本发明具有以下优点:
16、1. 基于纺织材料作为变刚度层的软体机械手,通过对人体手部关节动作的模仿以及基于人体骨骼解剖模型,结合具体抓取工作需要,解决了现有的通用的基于快速气动网格型或者纤维约束型软体机械手存在的问题。
17、2. 通过对快速气动网格侧面接触结构的修正,将流体驱动能量更多用于软体机械手的接触变形上。
18、3. 通过引入基于3d打印制作并由纺织材料构成的变刚度层结构,通过丝线连接配合,不修改机械手腔室条件下,修正了现有软体机械手负载能力较差以及只能进行单一常曲率变形的缺陷。
19、4. 通过变刚度结构和软体机械手本体的协同作用,基于纺织材料极高的柔顺性,很大程度上解除了变刚度机构和软体机械手变形作用的耦合,使得常规状态下变刚度层对于软体机械手的变形阻碍作用减小。
技术特征:
1.一种基于纺织材料变刚度软体机械手,包括软体手指,其特征在于,所述软体手指内设置有变形机构,软体手指的内侧面设置有变刚度机构;所述变形机构包括设置于软体手指内并由多个连续的隆起腔体组成的腔室层,软体手指内靠近变刚度机构一侧设置有连通所有腔体的流道层,软体手指内还设置有用于封闭腔室层和流道层的限制层;所述变刚度机构包括设置于软体手指内侧面上的外膜壳,所述外膜壳内设置有纺织材料层,所述纺织材料层包括沿外膜壳内腔长度方向依次设置的若干组空心晶胞组件,相邻两空心晶胞组件之间经丝线相连接。
2.根据权利要求1所述的基于纺织材料变刚度软体机械手,其特征在于,还包括固定座板,所述固定座板的下侧经连接座安装有至少两根软体手指。
3.根据权利要求1或2所述的基于纺织材料变刚度软体机械手,其特征在于,所述软体手指的底部形成指尖抓取部位,所述变刚度机构的内侧面形成包络抓取部位。
4.根据权利要求1所述的基于纺织材料变刚度软体机械手,其特征在于,所述腔体呈直线排布于软体手指内,位于软体手指的上部侧壁设置有用于与流体控制系统相连接的流体进出口,所述流体进出口与流道层相连通。
5.根据权利要求1、2或4所述的基于纺织材料变刚度软体机械手,其特征在于,所述软体手指的内侧面形成接触层,所述接触层经粘合剂与外膜壳相连接。
6.根据权利要求5所述的基于纺织材料变刚度软体机械手,其特征在于,所述粘结剂为硅胶粘合剂。
7.根据权利要求1所述的基于纺织材料变刚度软体机械手,其特征在于,所述限制层材料为聚氯乙烯、热塑性聚氨酯弹性体或树脂;所述腔室层和流道层的材料均为聚二甲基硅氧烷或硅胶。
8.根据权利要求1、6或7所述的基于纺织材料变刚度软体机械手,其特征在于,所述外膜壳采用聚乙烯负压薄膜或硅胶薄膜制成;所述丝线为尼龙丝线。
9.根据权利要求1所述的基于纺织材料变刚度软体机械手,其特征在于,所述空心晶胞组件为多个金字塔形立方八面体空心互锁晶胞结构、六面体空心互锁晶胞结构、四面体空心互锁晶胞结构或空心圆环互锁晶胞结构组成,并由树脂材料经3d打印制作而成。
10.一种应用于权利要求4所述的基于纺织材料变刚度软体机械手的使用方法,其特征在于,步骤如下:
技术总结
本发明涉及一种基于纺织材料变刚度软体机械手及其使用方法,包括软体手指,所述软体手指内设置有变形机构,软体手指的内侧面设置有变刚度机构;所述变形机构包括设置于软体手指内并由多个连续的隆起腔体组成的腔室层,软体手指内靠近变刚度机构一侧设置有连通所有腔体的流道层,软体手指内还设置有用于封闭腔室层和流道层的限制层;所述变刚度机构包括设置于软体手指内侧面上的外膜壳,所述外膜壳内设置有纺织材料层,所述纺织材料层包括沿外膜壳内腔长度方向依次设置的若干组空心晶胞组件,相邻两空心晶胞组件之间经丝线相连接。该机械手结构简单,可以实现更大尺度的抓取作业。
技术研发人员:姚立纲,韩兴斌,温自恒,谭子超,张彪伟
受保护的技术使用者:福州大学
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!