一种可调夹紧力大小的节能机械抓手
本发明属于智能制造设备,具体涉及一种可调夹紧力大小的节能机械抓手。
背景技术:
1、机械抓手一般固定在机器人或其他机构末端用来抓取工件。
2、机械抓手抓紧力往往不可调节,对于受力差别较大的工件,当抓紧力过大时,工件可能变形;当抓紧力过小时,工件可能无法抓取。并且机械抓手夹紧力的产生、保持往往是靠气驱或者电驱,能源消耗较大。
3、针对以上问题,本申请提出一种可调夹紧力大小的节能机械抓手。
技术实现思路
1、本发明的目的就在于为解决现有技术的不足而提供一种可调夹紧力大小的节能机械抓手。
2、一种可调夹紧力大小的节能机械抓手,包括抓手机构,所述抓手机构包括若干个活动夹爪;所述节能机械抓手还包括磁力机构和驱动机构;
3、所述磁力机构包括若干个磁力母块和若干个磁力子块;至少有一部分所述磁力母块与一部分所述磁力子块磁极相反,一部分所述磁力母块与一部分所述磁力子块磁极相同;所述磁力母块和/或所述磁力子块包括多个不同磁力大小的磁铁块;
4、所述磁力子块设于所述活动夹爪上,所述磁力母块设于若干个所述活动夹爪的内侧中心或外周;
5、所述驱动机构与所述磁力母块或所述磁力子块连接,用于驱动所述磁力母块与所述磁力子块的相对位置关系发生变化,进而使所述活动夹爪状态发生变化。
6、优选地,所述驱动机构与所述磁力母块或所述磁力子块连接,用于驱动所述磁力母块与所述磁力子块的相对位置关系发生如下变化,进而使所述活动夹爪状态发生变化:
7、当所述磁力母块设于若干个所述活动夹爪的内侧中心时:
8、a.使磁极相同的所述磁力母块部分与所述磁力子块部分靠近,靠近的所述磁力母块和磁力子块之间产生排斥力,所述活动夹爪张开;
9、b.使磁极相反的所述磁力母块部分与所述磁力子块部分靠近,靠近的所述磁力母块和磁力子块之间产生吸引力,所述活动夹爪夹紧;
10、c.使不同磁力大小且磁极相反的所述磁力母块部分与所述磁力子块部分靠近,所述活动夹爪夹紧力发生变化;
11、当所述磁力母块设于若干个所述活动夹爪外周时,当靠近的所述磁力母块部分与所述磁力子块部分磁极相反时,所述活动夹爪张开,磁极相同时,所述活动夹爪夹紧。
12、优选地,所述磁力母块与所述驱动机构连接,所述驱动机构驱动所述磁力母块移动,与所述磁力子块之间的相对位置关系发生变化。
13、优选地,所述磁力母块位于若干个所述活动夹爪的内侧中心。
14、优选地,每个所述活动夹爪上设有若干个所述磁力子块,所述磁力子块的总数量为n,所述磁力母块为1个,包括n个数量、位置与所述磁力子块相对应的母磁块,每个所述磁力子块包括m个不同磁力大小的所述磁铁块;n为≥2的整数,m为≥2的整数。
15、优选地,相隔p个的两个所述磁力子块的磁极不同,相应地相隔p个的两个所述母磁块的磁极也不同;p为≥0的整数;n个所述母磁块在水平方向上环形均匀分布,m个所述磁铁块上下竖直分布;
16、所述驱动机构包括水平旋转机构和升降机构,所述升降机构与所述磁力母块或磁力子块连接,能够带动所述磁力母块或磁力子块上下移动;所述升降机构位于所述水平旋转机构上,所述水平旋转机构能够带动升降机构以及所述磁力母块或所述磁力子块水平旋转;
17、当所述磁力母块设于若干个所述活动夹爪中心时:
18、控制所述水平旋转机构旋转至第一位置,使靠近的所述磁力母块上的母磁块与所述磁力子块的磁铁块磁极相同,所述活动夹爪张开;
19、控制所述水平旋转机构旋转至第二位置,使靠近的所述磁力母块上的母磁块与所述磁力子块的磁铁块磁极相反,所述活动夹爪夹紧;
20、控制所述升降机构移动至第三位置,使所述磁力母块上的母磁块与不同磁力大小的所述磁力子块的磁铁块靠近,所述活动夹爪夹紧力发生变化。
21、优选地,所述磁力母块上的所有母磁块的磁极相同,每个所述磁力子块包括上下分布的第一子磁块和第二子磁块;所述第一子磁块磁极与所述磁力母块磁极相同,所述第二子磁块磁极与所述磁力母块磁极相反,所述第二子磁块包括多个上下竖直分布的所述磁铁块;
22、所述驱动机构为升降机构,所述升降机构与所述磁力母块或磁力子块连接,能够带动所述磁力母块或磁力子块上下移动;
23、当所述磁力母块设于若干个所述活动夹爪中心时:
24、控制所述升降机构移动至第四位置,使所述磁力母块上的母磁块与磁极相同的所述第一子磁块靠近,所述活动夹爪张开;
25、控制所述升降机构移动至第五位置,使所述磁力母块上的母磁块与磁极相反的所述第二子磁块靠近,所述活动夹爪夹紧;
26、控制所述升降机构移动至第六位置,使所述磁力母块上的母磁块与不同磁力大小的磁铁块靠近,所述活动夹爪夹紧力发生变化。
27、优选地,所述水平旋转机构为舵机机构。
28、优选地,所述升降机构包括电机、齿轮和竖向齿条,所述齿条与所述磁力母块或磁力子块连接,所述齿轮与所述齿条啮合,所述电机的输出轴与所述齿轮连接,所述电机驱动所述齿轮旋转,带动所述齿条以及与所述齿条连接的磁力母块或磁力子块上下移动。
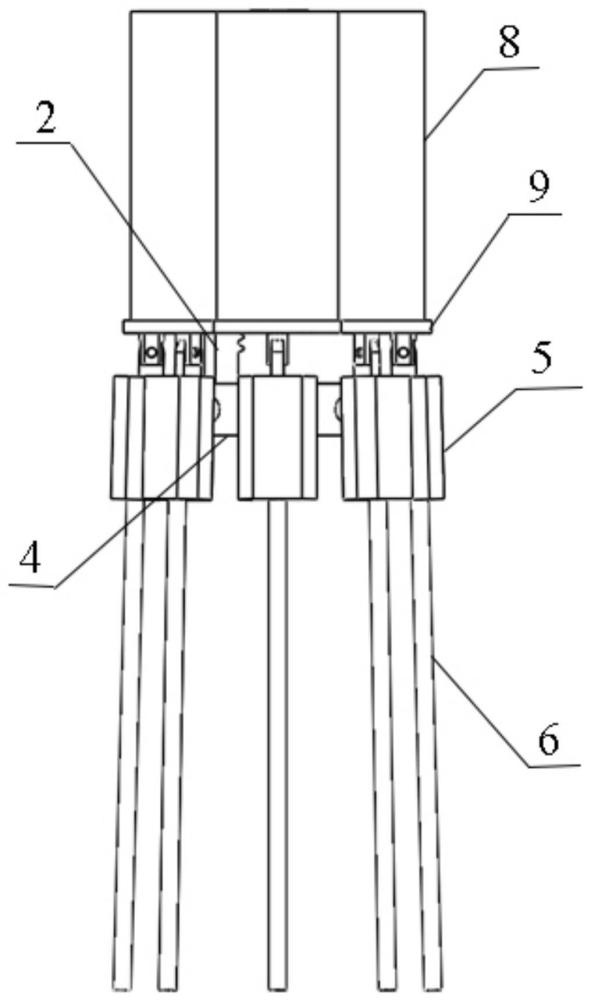
29、优选地,所述机械抓手还包括基座;
30、多个所述活动夹爪铰接于所述基座底部,且围绕所述基座环形均匀分布;所述电机和所述齿轮设于所述基座上方,所述基座上设有供所述齿条穿过的通孔;
31、每个活动夹爪上部均设有若干个所述磁力子块;
32、所述磁力母块连接于所述齿条底部,且位于多个所述活动夹爪的内侧中心。
33、本申请采用磁力机构代替现有技术中的电驱、液驱和气驱,设置具有不同磁极和磁力大小的磁力母块和磁力子块,将磁力子块与夹爪连接,通过改变磁力母块与磁力子块的相对位置关系,实现了夹爪的松开和夹紧状态改变以及夹紧力大小的调整,可以适应不同重量、不同材质物体的抓取;抓取物品以及夹紧力大小的调整由磁力产生,起到节能作用。
技术特征:
1.一种可调夹紧力大小的节能机械抓手,包括抓手机构,所述抓手机构包括若干个活动夹爪;其特征在于,所述节能机械抓手还包括磁力机构和驱动机构;
2.如权利要求1所述的可调夹紧力大小的节能机械抓手,其特征在于,
3.如权利要求2所述的可调夹紧力大小的节能机械抓手,其特征在于,
4.如权利要求2所述的可调夹紧力大小的节能机械抓手,其特征在于,
5.如权利要求2所述的可调夹紧力大小的节能机械抓手,其特征在于,
6.如权利要求5所述的可调夹紧力大小的节能机械抓手,其特征在于,
7.如权利要求5所述的可调夹紧力大小的节能机械抓手,其特征在于,
8.如权利要求6所述的可调夹紧力大小的节能机械抓手,其特征在于,
9.如权利要求6或7所述的可调夹紧力大小的节能机械抓手,其特征在于,
10.如权利要求9所述的可调夹紧力大小的节能机械抓手,其特征在于,
技术总结
本发明公开了一种可调夹紧力大小的节能机械抓手,包括磁力机构和驱动机构;磁力机构包括若干个磁力母块和若干个磁力子块;至少有一部分磁力母块与一部分磁力子块磁极相反,一部分磁力母块与一部分磁力子块磁极相同;磁力母块和/或磁力子块包括多个不同磁力大小的磁铁块;磁力子块设于活动夹爪上,磁力母块设于若干个活动夹爪的内侧中心或外周;驱动机构与磁力母块或磁力子块连接,用于驱动磁力母块与磁力子块的相对位置关系发生变化,进而使活动夹爪状态发生变化。本申请抓取物品以及夹紧力大小的调整由磁力产生,起到节能作用。
技术研发人员:武同,张翼风,鲁宁,杨莉,王亚强,李肖文
受保护的技术使用者:河南职业技术学院
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!