一种双轴万向调节的运动平台的制作方法
本发明涉及光刻机,特别涉及一种双轴万向调节的运动平台。
背景技术:
1、光刻机的光学透镜系统通常由一个或多个光学透镜组成,用于聚焦和控制光束的传输。这些光学透镜需要精确的位置和角度调整,以确保在光刻过程中得到所需的图形投影。
2、传统光刻机的运动平台通常由多个自由度的运动模块组成。这些运动模块可以通过驱动装置实现对平台的运动和定位控制。运动平台与光学透镜系统的配合非常重要,因为它们允许调整光学透镜的位置和角度,从而实现光学系统的校准和优化。运动平台的精确控制对于光刻机的性能至关重要。通过微调运动平台上的运动模块,可以实现对光学透镜的微调,进而优化成像质量和投影精度。这对于在半导体制造等领域中要求非常高的微影技术非常重要,因为任何微小的误差都可能导致产品质量下降或产生不良的芯片。
3、光刻机的多维运动平台是一个关键的组件,它通过调整光学透镜的位置和角度,实现光学系统的校准和优化,从而确保高质量的图形投影和稳定的光刻过程。
4、但是发明人经长期工作与研究发现,传统承载光学透镜系统所驱动的运动平台存在着如下技术问题亟需解决:
5、(1)有限的精度和稳定性:伺服电缸的精度和稳定性相对较低。伺服电缸的运动存在间隙和摩擦,这些因素会对运动精度和稳定性产生影响。对于高精度光刻加工而言,这种不稳定性可能导致位置偏移或者震动,影响加工质量。
6、(2)速度和响应受限:伺服电缸的响应速度受到电机和传动系统的限制。由于螺杆传动的特性,伺服电缸在高速运动时存在振动和失速等问题,限制了其响应速度和加工效率。
7、(3)限制调节灵活性:伺服电缸通常只能实现单一方向的线性运动,其调节灵活性受到限制。尽管通过并联机构的设计,可以在某种程度上增加运动自由度,但调节灵活性仍然有一定局限。
8、为此,提出一种双轴万向调节的运动平台。
技术实现思路
1、有鉴于此,本发明实施例希望提供一种双轴万向调节的运动平台,以解决或缓解现有技术中存在的技术问题,即有限的精度和稳定性、速度和响应受限和限制调节灵活性,并至少提供一种有益的选择;
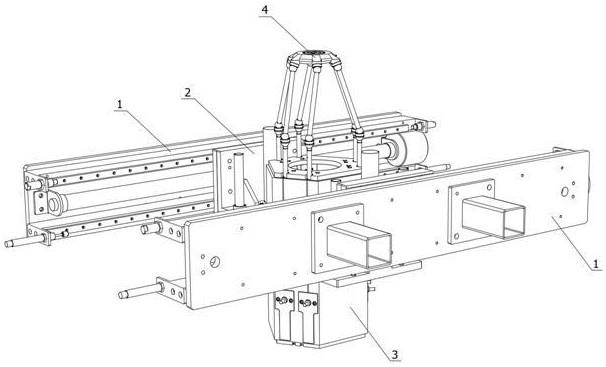
2、本发明实施例的技术方案是这样实现的:一种双轴万向调节的运动平台,包括第一线性组件和第二线性组件;所述第一线性组件调节所述第二线性组件的x轴或z轴方位,所述第二线性组件升降调节万向调节机构的方位;所述万向调节机构包括至少六个沿同一y轴环形阵列式排布的线性自由度,所有所述线性自由度的行程方向相互之间呈棱锥形布置,所述线性自由度连接作用于光学台作万向角度调节。
3、在上述实施方式中,该双轴万向调节的运动平台由第一线性组件和第二线性组件组成。第一线性组件用于调节第二线性组件的x轴或z轴方位,而第二线性组件用于升降调节万向调节机构的方位。万向调节机构包含至少六个沿同一y轴环形阵列式排布的线性自由度。这些线性自由度的行程方向相互之间呈棱锥形布置,这些线性自由度与光学台相连,实现万向角度调节。
4、其中在一种实施方式中:所述万向调节机构包括架体和以所述架体的垂直中轴线为基准的环形阵列式排布的直线单元,所述直线单元驱动光学台作万向角度调节。
5、在上述实施方式中,万向调节机构由架体和环形阵列式排布的直线单元组成。架体是一个支撑结构,其垂直中轴线作为基准。环形阵列式排布的直线单元沿着这个垂直中轴线均匀分布。这些直线单元连接到光学台上,用于驱动光学台进行万向角度调节。
6、其中在一种实施方式中:所述直线单元的数量为六个,所述直线单元包括第二旋转执行器、第三线性模组和滑块;所述滑块垂直滑动配合于所述架体,所述第三线性模组驱动所述滑块升降调节,所述第三线性模组由所述第二旋转执行器驱动;第二铰臂的一端和另一端通过万向节联轴器铰接于第一铰臂的顶部和所述光学台的底部;用于输出所述线性自由度的所述第一铰臂的底部固设于所述滑块上。
7、在上述实施方式中,万向调节机构包含六个直线单元,每个直线单元由第二旋转执行器、第三线性模组和滑块组成。这六个直线单元均匀分布在架体上。滑块垂直滑动配合于架体,第三线性模组通过驱动滑块的升降运动,而第三线性模组则由第二旋转执行器驱动。第一铰臂通过万向节联轴器铰接在第二铰臂的一端,另一端则通过万向节联轴器铰接在光学台的底部。第一铰臂的底部固定在滑块上,用于输出线性自由度。
8、其中在一种实施方式中:所述第三线性模组优选为垂直布置的第二滚珠丝杠,所述第二旋转执行器优选为第二伺服电机,所述第二伺服电机固设于所述架体并驱动第二滚珠丝杠的螺纹杆转动,所述第二滚珠丝杠的螺纹杆的上下轴头均通过轴承铰接并支撑于所述架体的上表面和下表面,所述第二滚珠丝杠的移动螺母固定连接于所述滑块。
9、在上述实施方式中,第三线性模组采用垂直布置的第二滚珠丝杠,而第二旋转执行器采用第二伺服电机。通过这种实施方式,光刻机可以实现对光学台的高度和角度的精确调节,满足不同工艺和图形投影的要求。第二滚珠丝杠和第二伺服电机的结合设计,为光刻机的万向调节机构提供了可靠的运动控制和稳定性,从而确保光刻加工的高精度和高质量。
10、其中在一种实施方式中:所述第二线性组件包括第二机架及垂直滑动配合于所述第二机架的移动台,所述移动台由安装在所述第二机架上的第二线性模组驱动升降。
11、在上述实施方式中,第二线性组件由第二机架和垂直滑动的移动台组成。移动台垂直滑动配合于第二机架。移动台由安装在第二机架上的第二线性模组驱动升降。
12、其中在一种实施方式中:所述第二线性模组优选为伺服电缸,所述伺服电缸的缸体和活塞杆分别固设于所述第二机架和所述移动台。
13、在上述实施方式中,第二线性模组采用伺服电缸。伺服电缸的缸体固定在第二机架上,而活塞杆固定在移动台上。
14、其中在一种实施方式中:所述第一线性组件包括第一机架,所述第二机架及沿x轴或z轴方位滑动配合于所述第一机架;所述第一机架和所述第二机架之间的滑动面设有第一线性模组,所述第一线性模组用于驱动所述第二机架滑动配合于所述第一机架,所述第一线性模组由第一旋转执行器驱动。
15、在上述实施方式中,第一线性组件由第一机架、第二机架以及沿x轴或z轴方向滑动配合于第一机架的部分组成。第一机架和第二机架之间的滑动面设有第一线性模组,用于驱动第二机架在第一机架上滑动配合。第一线性模组由第一旋转执行器驱动。
16、其中在一种实施方式中:所述第一线性模组优选为x轴或z轴布置的第一滚珠丝杠,所述第一旋转执行器优选为第一伺服电机,所述第一滚珠丝杠的螺纹杆的双端轴头通过轴承转动配合于所述第一机架的两端,所述第一伺服电机固设于所述第一机架并驱动第一滚珠丝杠的螺纹杆转动,所述第一滚珠丝杠的移动螺母与所述第二机架固定连接。
17、在上述实施方式中,第一线性模组采用x轴或z轴布置的第一滚珠丝杠,而第一旋转执行器采用第一伺服电机。第一滚珠丝杠的螺纹杆的双端轴头通过轴承转动配合于第一机架的两端。第一伺服电机固定在第一机架上,并驱动第一滚珠丝杠的螺纹杆转动。第一滚珠丝杠的移动螺母与第二机架固定连接。
18、与现有技术相比,本发明的有益效果是:
19、一、多维度灵活调节:万向调节机构中的线性自由度的棱锥形布置使得光学台可以在多个方向上实现高精度的旋转和倾斜调整,从而适应复杂的多维度加工需求,增加了加工的灵活性和多样性。
20、二、平稳和连续运动轨迹:滚珠丝杠的传动机制使得光学台的运动轨迹呈现自然的曲线形状,与光学台的倾斜角度相对应。这种曲线形状的运动路径使得光学台的倾斜动作更加平稳和连续,减少了运动过程中的冗余和误差,从而提高了加工的稳定性和质量。
21、三、高精度和稳定性:采用第二滚珠丝杠作为驱动方式,滚珠丝杠具有较高的传动效率和刚性,使得光刻机的运动平台能够实现高精度和稳定的运动控制,从而提高光刻加工的精度和加工质量。
22、四、减少冗余度和提高效率:第二线性组件2用于预先的大体量升降调节,当光学台高度逼近误差阈值后,再由万向调节机构3进行精细的高度调节及万向角度调节。这种设计减少了冗余度,提高了调节效率,加快了加工过程。
23、五、可靠性和耐久性:采用滚珠丝杠等传动机构,减少了零部件的磨损和损坏,提高了设备的可靠性和耐久性,同时减少了维护成本和频率。
24、六、提高生产效率:高精度、稳定性和灵活性的结合使得光刻机能够更快速、高效地完成加工任务,提高了生产效率,降低了生产成本。
25、七、优化图形投影:多维度灵活调节和平稳运动轨迹使得光刻机能够更精确地投影复杂的图形,实现高质量的图案形成。
- 还没有人留言评论。精彩留言会获得点赞!