一种激光自动加工平台的制作方法
[0001]
本发明涉及一种应用于激光加工领域的试验装置,更确切地说,本发明涉及一种能够在不手动更换激光加工头的前提下,利用一台激光器自动实现对材料进行焊接、切割、熔覆、喷丸等操作的加工平台。
背景技术:
[0002]
随着科技的发展,激光加工作为一种先进制造技术已广泛应用于汽车、电子、电器、航空、冶金、机械制造等国民经济重要部门,激光加工中的激光焊接、切割、熔覆、打孔、喷丸等先进的加工技术比传统加工技术具有很大的优势。对提高产品质量、劳动生产率、减少环境污染、材料消耗等起到愈来愈重要的作用。
[0003]
激光器成本高,一台激光器往往搭配不同的激光加工头进行加工,在实际综合生产和试验中需要手动更换激光加工头,影响效率、精度和使用寿命。目前国内没有可以自动更换激光加工头的平台设备。因此,发明一种不用手动更换激光加工头,只需要电脑控制就可以在平台上利用一台激光器进行多种激光加工操作的试验装置与试验方法具有很好的实用性与经济性。
技术实现要素:
[0004]
本发明所要解决的技术问题是目前缺乏一种能够在不用手动更换激光加工头的前提下,利用一台激光器自动实现对材料进行焊接、切割、熔覆、喷丸等操作的集成加工试验装置,提出了一种不用手动更换激光加工头,通过电脑程序控制激光加工头的自动转换及其具体的试验操作方法。
[0005]
本发明技术方案结合附图说明如下:
[0006]
一种激光自动加工平台,主要由空间调节装置、激光加工头回转装置、平台支撑装置、监测控制系统组成;
[0007]
所述的激光加工头回转装置包括转接板5、激光加工头11;
[0008]
所述转接板5与所述的空间调节装置中的z轴滑座28连接;
[0009]
所述的监测控制系统包括激光同轴ccd摄像机、高速摄像机13;
[0010]
所述激光同轴ccd摄像机与激光加工头连接;
[0011]
所述高速摄像机13固定在所述平台支撑装置一侧。
[0012]
技术方案中所述的空间调节装置包括xyz三轴伺服电机、滚珠丝杠、丝杠螺母、导轨、滑块、滑座、底板;
[0013]
滚珠丝杠两端装有轴承座固定轴承,伺服电机带有制动器,并通过静脉行星减速机驱动滚珠丝杠,丝杠螺母与滑座通过螺栓连接,滑块安装在导轨上,滑座固定在丝杠螺母与滑块上。
[0014]
技术方案中所述的激光加工头回转装置还包括回转电机35、回转电机防护罩4、联轴器d6、回转轴7、固定杆9、回转轴安装盘8、加工轴底板36、加工轴电机10、加工轴丝杠38、
加工轴联轴器37、加工轴丝杠螺母39、加工轴滑座40;
[0015]
所述的转接板5与回转电机防护罩4通过底部螺栓与加强筋处的螺栓连接,通过加强筋来增加稳定性,回转电机35通过螺栓固定在回转电机防护罩4上,回转电机35通过联轴器d6与回转轴7连接,回转轴7与回转安装盘8固定,通过回转轴7带动回转安装盘8旋转,固定杆9通过螺栓与回转轴安装盘8连接,对回转轴安装盘8起到固定与定位的作用;
[0016]
所述的加工轴底板36与回转轴安装盘8通过螺栓连接,加工轴电机10固定在加工轴底板36上,并且通过加工轴联轴器37与加工轴丝杠38进行连接,加工轴丝杠38经由加工轴丝杠螺母39,通过螺栓与加工轴滑座40连接,激光加工头11通过圆形槽处的螺栓固定在加工轴滑座40上。
[0017]
技术方案中所述的平台支撑装置包括加工平台12、龙门柱42、平台支架14、平台电机43、平台电机联轴器44、平台丝杠49、平台丝杠螺母45、平台导轨46、平台滑块47、平台滑座48;
[0018]
所述加工平台12通过螺栓与平台丝杠螺母45和平台滑块47连接,平台电机43通过平台联轴器44与平台丝杠49和平台丝杠螺母45连接,平台滑块47固定在平台导轨46上,平台导轨46固定在平台滑座48上,平台滑座48与平台电机43都与平台支架14通过螺栓连接,平台支架14与y加工轴通过螺栓固定在龙门柱42上。
[0019]
技术方案中所述的监测控制系统还包括激光器控制柜15、pc计算机17、直线度传感器50;
[0020]
所述直线度传感器50设置在转接板5上;
[0021]
激光器控制柜15包括工控机、可编程控制器、激光器控制器、伺服驱动器;
[0022]
所述的工控机能够发送指令控制可编程控制器驱动激光控制器来实现对激光参数的调节与设定;
[0023]
pc计算机17与激光控制柜15的可编程控制器相连。
[0024]
技术方案中所述xyz三轴伺服电机包括x轴电机3、y轴电机2、z轴电机1,xyz三轴伺服电机分别与x轴丝杠18、y轴丝杠19、z轴丝杠20都通过联轴器a21、联轴器b22、联轴器c23连接;
[0025]
所述的x轴丝杠18、y轴丝杠19、z轴丝杠20通过轴承座24与丝杠螺母25固定,xyz三轴丝杠螺母分别与x轴滑座26、y轴滑座27、z轴滑座28通过螺栓连接;
[0026]
所述的x轴滑块29、y轴滑块30、z轴滑块31分别安装在x轴导轨32、y轴导轨33、z轴导轨34上,xyz三轴滑块分别与x轴滑座26、y轴滑座27、z轴滑座28通过螺栓连接。
[0027]
z轴滑座28与转接板5连接,x轴滑座26与z轴底板53连接,y轴滑座27与x轴底板51连接,y轴底板固定在龙门柱42上。
[0028]
技术方案中所述的激光加工头11带有红外指示激光,所述的可编程控制器与激光器控制器连接,可编程控制器下行方向与伺服驱动器连接,实现对加工平台各个伺服电机的控制,通过控制x轴电机3、y轴电机2、z轴电机1、平台电机43来实现整个加工平台的多轴联动;通过控制回转电机35实现不同种类激光加工头的切换;通过控制加工轴电机10,实现对激光加工头上下离焦量的精确调节。
[0029]
技术方案中所述的高速摄像机13通过三脚架固定在加工平台12一侧。
[0030]
技术方案中所述激光器控制柜15还包括手控盒16,所述的手控盒16安装在工控机
下端。
[0031]
技术方案中所述激光同轴ccd摄像机设置四个,所述激光加工头设置四个,分别为焊接、切割、熔覆、喷丸激光加工头。
[0032]
一种激光自动加工平台装置的使用方法,包括以下步骤:
[0033]
步骤1:根据加工过程需要,更换加工轴滑座40上的激光加工头11,最多可以配置四种不同种类的激光加工头,通过调节后面圆形槽处的螺栓位置,调节激光加工头11的激光入射角度;
[0034]
步骤2:在加工平台12上固定待加工的工件,通过专用夹具进行固定,通过手控盒16调节各轴的运动,将最先工作的激光加工头11调节到工件的加工起始位置作为加工原点,将原点位置在手控盒16上进行存储;
[0035]
步骤3:在控制柜15的工控机上设定激光加工的参数,比如激光焊接功率、激光切割功率、脉冲频率等参数;
[0036]
步骤4:通过pc计算机17上的编程软件设定加工流程,通过x加工轴、y加工轴、z加工轴、回转轴、加工轴、平台运动轴六轴的联动,来实现加工过程中四种激光加工头的自动切换,从而进行整个空间内的自动集成激光加工过程;
[0037]
步骤5:通过手控盒16读取pc计算机17上编程的加工程序,通过激光加工头11射出的红外指示激光进行整个加工工程的示教,保证加工过程的准确性;
[0038]
步骤6:关闭示教功能,打开高速摄像机13与激光同轴ccd摄像机41,通过手控盒16读取pc计算机17上的加工程序正式开始加工过程,通过pc计算机17观察工件表面加工状态和激光等离子体形态并对图片和视频信息进行存储与分析;
[0039]
步骤7:加工完成后,加工平台各轴自动回到原点位置,为防止误操作使激光再次射出,工控机与手控盒会进入暂时锁定状态,下一次加工开始时,需要再次手动解锁;
[0040]
从技术方案能够看出本发明的有益效果是:
[0041]
1.本发明所述的激光自动加工平台可以利用一台激光器实现加工过程中最多四种激光加工头的自动切换,减少了人工更换激光加工头的繁琐,可以在一个平台上同时实现激光焊接、切割、熔覆、喷丸等多种激光加工操作,具有很好的集成性与经济性;
[0042]
2.本发明所述的激光自动加工平台可以实现x轴、y轴、z轴、平台运动轴、回转轴、加工轴的六轴联动,通过计算机编程加工程序,灵活实现空间内的多种激光加工过程,具有很好的高效性与灵活性;
[0043]
3.本发明所述的激光自动加工平台,首先通过手控盒插入加工原点,手控盒读取加工程序进行示教,使加工过程更加方便准确,并且在加工完成后,在工控机与手控盒上添加了暂时锁紧程序,同时转接板上的传感器可以实时监测其直线度,在离焦量调节时进行相应的误差补偿,具有很好的安全性与精确性;
附图说明
[0044]
下面结合附图对本发明作进一步的说明:
[0045]
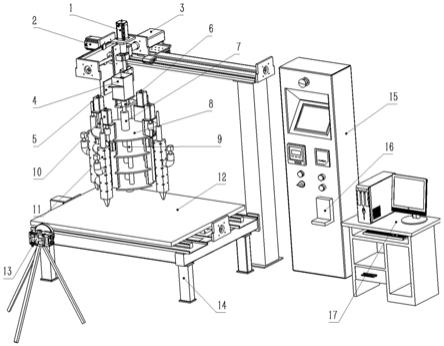
图1为所述的激光自动加工平台整体的轴测投影图。
[0046]
图2为所述的激光自动加工平台空间调节装置的结构图。
[0047]
图3为所述的激光自动加工平台激光加工头回转装置的结构图。
[0048]
图4为所述的激光自动加工平台平台支撑装置的结构图。
[0049]
图5为所述的激光自动加工平台监测控制系统原理图。
[0050]
图6为所述的激光自动加工平台使用方法的具体实施步骤。
[0051]
图中:
[0052]
1.z轴电机,2.y轴电机,3.x轴电机,4.回转电机防护罩,5.转接板,6.联轴器d,7.回转轴,8.回转轴安装盘,9.固定杆,10.加工轴电机,11.激光加工头,12.加工平台,13.高速摄像机,14.平台支架,15.激光器控制柜,16.手控盒,17.pc计算机,18.x轴丝杠,19.y轴丝杠,20.z轴丝杠,21.联轴器a,22.联轴器b,23.联轴器c,24.轴承座,25.丝杠螺母,26.x轴滑座,27.y轴滑座,28.z轴滑座,29.x轴滑块,30.y轴滑块,31.z轴滑块,32.x轴导轨,33.y轴导轨,34.z轴导轨,35.回转电机,36.加工轴底板,37.加工轴联轴器,38.加工轴丝杠,39.加工轴丝杠螺母,40.加工轴滑座,41.激光同轴ccd摄像机,42.龙门柱,43.平台电机,44.平台电机联轴器,45.平台丝杠螺母,46.平台导轨,47.平台滑块,48.平台滑座,49.平台丝杠,50.直线度传感器,51.x轴底板,52.y轴底板,53.z轴底板。
具体实施方式
[0053]
下面结合附图对本发明作详细的描述:
[0054]
本发明所述的激光自动加工平台及使用方法主要由两大部分组成,即激光自动加工平台结构部分和自动加工平台的具体使用方法部分。
[0055]
一种激光自动加工平台,主要由空间调节装置、激光加工头回转装置、平台支撑装置、监测控制系统组成。
[0056]
所述的空间调节装置包括xyz三轴伺服电机、滚珠丝杠、丝杠螺母、导轨、滑块、滑座、底板;
[0057]
滚珠丝杠两端装有轴承座固定轴承,为保证运行平稳,伺服电机带有制动器,并通过静脉行星减速机驱动滚珠丝杠,丝杠螺母与滑座通过螺栓连接,滑块安装在导轨上,z轴滑座28与转接板5连接,底板有x轴底板51、y轴底板52、z轴底板53;x轴滑座26与z轴底板53连接,同理y轴滑座27与x轴底板51连接,y轴底板固定在龙门柱42上,工作时各轴的伺服电机分别驱动各自轴的丝杠旋转,丝杠旋转带动螺栓连接的滑座运动,最终能够实现三轴的空间调节。
[0058]
所述的激光加工头回转装置包括转接板5、回转电机35、回转电机防护罩4、联轴器d6、回转轴7、固定杆9、回转轴安装盘8、加工轴底板36、加工轴电机10、加工轴丝杠38、加工轴联轴器37、加工轴丝杠螺母39、加工轴滑座40、激光加工头11;
[0059]
所述的平台支撑装置包括加工平台12、龙门柱42、平台支架14、平台电机43、平台电机联轴器44、平台丝杠49、平台丝杠螺母45、平台导轨46、平台滑块47、平台滑座48;
[0060]
加工平台12通过螺栓与平台丝杠螺母45和平台滑块47连接,平台电机43通过平台联轴器44与平台丝杠49和平台丝杠螺母45连接,平台滑块47固定在平台导轨46上,平台导轨46固定在平台滑座48上,平台滑座48与平台电机43都与平台支架14通过螺栓连接,平台支架14与y加工轴通过螺栓固定在龙门柱42上;
[0061]
所述的监测控制系统包括激光同轴ccd摄像机41、高速摄像机13、激光器控制柜15、pc计算机17、直线度传感器50;
[0062]
四个激光同轴ccd摄像机41分别与焊接、切割、熔覆、喷丸四个激光加工头11螺纹连接,用来观察激光加工过程的材料表面变化过程;
[0063]
高速摄像机13通过三脚架固定在加工平台12一侧,用来观察激光加工过程中的等离子体的形态变化;
[0064]
激光器控制柜15包括工控机、手控盒16、可编程控制器、激光器控制器、伺服驱动器;
[0065]
所述的工控机能够发送指令控制可编程控制器驱动激光控制器来实现对激光参数的调节与设定;
[0066]
所述的手控盒16安装在工控机下端,可以通过手控盒16来方便控制可编制控制器,从而控制伺服驱动器进行控制平台各轴的运动;
[0067]
pc计算机17与激光控制柜15的可编程控制器相连,通过软件编写加工平台的自动运动程序,驱动伺服驱动器实现激光加工的集成操作,并且通过显示屏显示摄像机的图像与视频信息,软件自动对其进行存储与处理。
[0068]
伺服电机包括x轴电机3、y轴电机2、z轴电机1,xyz三轴伺服电机分别与x轴丝杠18、y轴丝杠19、z轴丝杠20都通过联轴器a21、联轴器b22、联轴器c23连接;
[0069]
所述的x轴丝杠18、y轴丝杠19、z轴丝杠20通过轴承座24与丝杠螺母25固定,xyz三轴丝杠螺母分别与x轴滑座26、y轴滑座27、z轴滑座28通过螺栓连接;
[0070]
所述的x轴滑块29、y轴滑块30、z轴滑块31分别安装在x轴导轨32、y轴导轨33、z轴导轨34上,xyz三轴滑块分别与x轴滑座26、y轴滑座27、z轴滑座28通过螺栓连接;
[0071]
技术方案中所述的转接板5与z轴滑座28通过螺栓连接,转接板5与回转电机防护罩4通过底部螺栓与加强筋处的螺栓连接,通过加强筋来增加稳定性,转接板上有直线度传感器50用来监测转接板的直线度,反馈到控制器上自动进行离焦量的误差补偿,回转电机35通过螺栓固定在回转电机防护罩4上,回转电机35通过联轴器d6与回转轴7连接,回转轴7与回转安装盘8固定,通过回转轴7带动回转安装盘8旋转,固定杆9通过螺栓与回转轴安装盘8连接,对回转轴安装盘8起到固定与定位的作用;
[0072]
所述的加工轴底板36与回转轴安装盘8通过螺栓连接,加工轴电机10固定在加工轴底板36上,并且通过加工轴联轴器37与加工轴丝杠38进行连接,加工轴丝杠38经由加工轴丝杠螺母39,通过螺栓与加工轴滑座40连接,加工需要的焊接、切割、熔覆、喷丸四种不同功能的激光加工头11通过圆形槽处的螺栓固定在加工轴滑座40上,通过调整螺栓的位置,可以实现激光加工头11不同角度的旋转。
[0073]
所述的激光加工头11带有红外指示激光,在正式试验前可以对整个试验过程的平台运动过程进行程序的示教。
[0074]
技术方案中所述的可编程控制器与激光器控制器连接,可以调节激光器的各种加工参数,比如激光功率、保护气流量、脉冲频率等;
[0075]
可编程控制器下行方向与伺服驱动器连接,实现对加工平台各个伺服电机的控制,通过控制x轴电机3、y轴电机2、z轴电机1、平台电机43来实现整个加工平台的多轴联动;通过控制回转电机35实现不同种类激光加工头的切换;通过控制加工轴电机10,实现对激光加工头上下离焦量的精确调节;
[0076]
一、激光自动加工平台结构部分
[0077]
参阅图1,所述的激光自动加工平台结构部分,由空间调节装置、激光加工头回转装置、平台支撑装置、监测控制系统组成。
[0078]
1.空间调节装置:
[0079]
参阅图1与图2的所述的空间调节装置包括x轴电机3、y轴电机2、z轴电机1、x轴丝杠18、y轴丝杠19、z轴丝杠20、联轴器a21、联轴器b22、联轴器c23、轴承座24、丝杠螺母25、x轴滑座26、y轴滑座27、z轴滑座28、x轴导轨32、y轴导轨33、z轴导轨34、x轴滑块29、y轴滑块30、z轴滑块31。
[0080]
所述的x轴电机3、y轴电机2、z轴电机1分别与x轴丝杠18、y轴丝杠19、z轴丝杠20都通过联轴器a21、联轴器b22、联轴器c23连接;
[0081]
所述的x轴丝杠18、y轴丝杠19、z轴丝杠20通过轴承座24与丝杠螺母25固定,xyz三轴丝杠螺母分别与x轴滑座26、y轴滑座27、z轴滑座28通过螺栓连接;
[0082]
所述的x轴滑块29、y轴滑块30、z轴滑块31分别安装在x轴导轨32、y轴导轨33、z轴导轨34上,xyz三轴滑块分别与x轴滑座26、y轴滑座27、z轴滑座28通过螺栓连接;
[0083]
各运动轴的伺服电机与丝杠都通过联轴器连接,丝杠两端装有轴承座固定轴承,为保证运行平稳,伺服电机带有制动器,伺服电机通过静脉行星减速机驱动滚珠丝杠,丝杠螺母与滑座通过螺栓连接,滑块安装在导轨上,滑座通过螺栓固定在丝杠螺母与滑块上,通过可编程控制器控制六个轴上的伺服电机实现六轴的联动,可以在不用更换激光加工头的同时自动进行空间内的多种激光加工过程。
[0084]
2.激光加工头回转装置:
[0085]
参阅图1与图3激光加工头回转装置包括转接板5、回转电机35、回转电机防护罩4、联轴器d6、回转轴7、固定杆9、回转安装盘8、加工轴底板36、加工轴电机10、加工轴丝杠38、加工轴联轴器37、加工轴丝杠螺母39、加工轴滑座40、激光加工头11;
[0086]
所述的转接板5与z轴滑座28通过螺栓连接,转接板5与回转电机防护罩4通过底部螺栓与加强筋处的螺栓连接,通过加强筋来增加稳定性,回转电机35通过螺栓固定在回转电机防护罩4上,回转电机35通过联轴器d6与回转轴7连接,回转轴7与回转安装盘8固定,通过回转轴7带动回转安装盘8旋转,固定杆9通过螺栓与回转安装盘8连接,对回转安装盘8起到固定与定位的作用;
[0087]
所述的加工轴底板36与回转安装盘8通过螺栓连接,加工轴电机10固定在加工轴底板36上,并且通过加工轴联轴器37与加工轴丝杠38进行连接,加工轴丝杠38通过加工轴丝杠螺母39,丝杠螺母39螺栓与加工轴滑座40连接,不同种类的激光加工头11通过圆形槽处的螺栓固定在加工轴滑座40上,通过调整螺栓的位置,可以实现激光加工头11不同角度的旋转。
[0088]
所述的激光加工头11带有红外指示激光,在正式试验前可以对整个试验过程的平台运动过程进行程序的示教。
[0089]
3.平台支撑装置:
[0090]
参阅图1与图4,所述的平台支撑装置包括加工平台12、龙门柱42,平台支架14、平台电机43、平台电机联轴器44、平台丝杠49、平台丝杠螺母45、平台导轨46、平台滑块47、平台滑座48;
[0091]
所述的加工平台12通过螺栓与平台丝杠螺母45和平台滑块47连接,平台电机43通
过平台联轴器44与平台丝杠49和平台丝杠螺母45连接,平台滑块47固定在平台导轨46上,平台导轨46固定在平台滑座48上,平台滑座48与平台电机43都与平台支架14通过螺栓连接,平台支架14与y加工轴通过螺栓固定在龙门柱12上,龙门柱12保证了整个平台加工过程中的稳定性;
[0092]
4.监测控制系统:
[0093]
参阅图1与图3,所述的监测控制系统包括激光同轴ccd摄像机41、高速摄像机13、激光器控制柜15、pc计算机17、直线度传感器50;
[0094]
参阅图3,激光同轴ccd摄像机41与各自的激光加工头11螺纹连接,用来观察整个激光加工过程的材料表面变化过程,并在pc计算机上17上进行自动存储与处理,转接板5上有直线度传感器50用来监测转接板的直线度,反馈到控制器上自动进行离焦量的误差补偿;
[0095]
参阅图1,高速摄像机13通过三脚架固定在加工平台12一侧,用来观察激光加工过程中的等离子体的形态变化,并将图像与视频信息存储在pc计算机17上;
[0096]
参阅图1,激光器控制柜15包括工控机、手控盒16、可编程控制器、激光器控制器、伺服驱动器,将控制柜15与pc计算机17放置在距离加工平台3米以上的距离,以避免激光对设备和人身安全造成伤害;
[0097]
参阅图5,所述的控制柜15工控机接收来自键盘和鼠标的输入数据,并将试验的实时状态通过显示器反馈给使用者,同时工控机通过键盘与鼠标等输入设备只需简单手动发送指令控制可编程控制器,就可通过内部设置完成的程序驱动激光控制器来实现对激光参数的调节与设定,从而可以调节激光器的各种加工参数,比如激光功率、保护气流量、脉冲频率等;
[0098]
参阅图1与图5,所述的手控盒16安装在工控机下端,可以通过手控盒16方便控制可编制控制器,可编程控制器下行方向与伺服驱动器连接,实现对加工平台各个伺服电机的控制,通过控制x轴电机3、y轴电机2、z轴电机1、平台电机43来实现整个加工平台的多轴联动;通过控制回转电机35实现不同种类激光加工头的自动切换;通过控制加工轴电机10,实现对激光加工头上下离焦量的自动精确调节;
[0099]
参阅图5,pc计算机17与可编程控制器相连,通过软件用来编程加工平台的自动程序加工,驱动伺服驱动器实现对六轴伺服电机的控制,通过六轴联动自动进行激光加工的集成操作,加工过程中并且可以通过显示屏显示软件采集的摄像机的图像与视频信息,自动通过软件进行存储与处理。
[0100]
工控机软件安装在工控机中,使用可视化编程软件labview编制。在控制界面上设定激光加工过程的离焦量、激光功率、工作时间等参数之后,与可编程控制器通过rs232c进行串口通讯,按照设定的参数进行激光加工过程。
[0101]
二、激光自动加工平台使用方法部分
[0102]
本发明专利针对设计的激光自动加工平台提出了一套系统化的加工平台使用方法,可以利用一台激光器在不手动更换激光加工头的前提下,通过计算机控制平台的六个运动轴,安全精确的在平台空间内进行焊接、切割、熔覆、喷丸等最多四种激光加工方式的集成操作。
[0103]
参阅图6,激光自动加工平台使用方法具体流程如下:
[0104]
1.根据具体加工工艺的需要,首先手动更换加工轴滑座上的激光加工头,最多可以同时配置四种不同种类的激光加工头,通过调节滑座后面圆形槽处的螺栓位置,调节激光加工头需要的激光入射角度;
[0105]
2.在加工平台上通过专用夹具固定待加工的工件,通过控制柜上的手控盒调节平台各轴的运动,将加工过程最先工作的激光加工头调节到工件的加工起始位置作为加工原点,将原点的位置坐标在手控盒上进行手动插入存储;
[0106]
3.在控制柜的工控机上设定好各个激光加工头工作时的工艺参数,比如激光焊接功率、激光切割功率、脉冲频率等参数;
[0107]
4.通过pc计算机上的编程软件设定整个加工工艺流程,通过可编程控制器来驱动x加工轴、y加工轴、z加工轴、回转轴、加工轴、平台运动轴的运动来实现六轴的联动,回转轴可以实现加工过程中四种激光加工头的自动切换,通过六轴的联动配合从而进行整个空间内的自动集成激光加工过程;
[0108]
5.通过控制柜手控盒读取pc计算机上编程的加工程序,读取程序后选择示教功能,激光加工头会按工作顺序依次射出红外指示激光进行整个加工工程的示教,通过示教功能来保证加工过程的准确性;
[0109]
6.示教完成后,关闭示教功能,打开高速摄像机与激光同轴ccd摄像机,通过手控盒读取pc计算机上的加工程序选择加工功能,正式开始整个激光加工过程,在加工过程中通过pc计算机可以观察工件表面的加工状态和激光等离子体形态并自动对图片和视频信息进行存储与分析;
[0110]
7.加工过程完成后,加工平台各轴会自动回到原点位置,为防止误操作使激光再次射出,工控机与手控盒会进入暂时锁定状态,直到下一次加工开始时,需要再次手动解锁才可继续操作;
[0111]
本发明中所述的实例是为了便于该领域技术人员能够理解和应用本发明。本发明只是一个优化的实例,或者说是一种较佳的具体技术方案,如果相关的技术人员在坚持本发明基本技术方案的情况下,作出不需要经过创造性劳动的等效结构变化或各种修改都在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1