清洗机床的作业区域的清洗系统和方法与流程
1.本发明涉及清洗机床的作业区域的清洗系统和方法。
背景技术:
2.已知一种清洗机床的作业区域的系统(例如,日本特开平10-11884号公报)。以往,谋求提升机床的清洗系统的作业效率。
技术实现要素:
3.本公开的一方式中提供一种清洗机床的作业区域的清洗系统,具有:清洗喷嘴,其对设置于机床的装卸装置进行装卸,该清洗喷嘴喷出流体;机器人,其能够把持清洗喷嘴;以及清洗执行部,其使机器人动作而执行拆除动作和清洗动作,拆除动作是使机器人把持装配于装卸装置的清洗喷嘴而从该装卸装置拆除的动作,清洗动作是利用机器人使清洗喷嘴向作业区域移动,从清洗喷嘴喷出流体而清洗作业区域的动作。
4.本公开的其他方式中提供一种清洗机床的作业区域的方法,使机器人动作而执行拆除动作和清洗动作,拆除动作是使机器人把持装配在设置于机床的装卸装置的清洗喷嘴而从该装卸装置拆除的动作,清洗动作是利用机器人使清洗喷嘴向作业区域移动,从清洗喷嘴喷出流体而清洗作业区域。
5.根据本公开,可以利用机器人操作清洗喷嘴来清洗机床的作业区域,因此,可以提升清洗作业的效率。
附图说明
6.图1是一实施方式涉及的清洗系统的框图。
7.图2是图1所示的清洗系统的概略图。
8.图3是表示图1所示的清洗系统的动作流程的一例的流程图。
9.图4示出了对在图3中的步骤s1中拍摄到的第1图像数据进行了图像化的一例。
10.图5示出了对在图3中的步骤s3中拍摄到的第2图像数据进行了图像化的一例。
11.图6是示意性地表示对第1图像数据的各像素的亮度进行了数值化的示例的图。
12.图7是示意性地表示对第2图像数据的各像素的亮度进行了数值化的示例的图。
13.图8是对一例涉及的第3图像数据的各像素的亮度进行了数值化的图。
14.图9是对其他示例涉及的第3图像数据的各像素的亮度进行了数值化的图。
15.图10是对另外其他示例涉及的第3图像数据的各像素的亮度进行了数值化的图。
16.图11表示对第3图像数据的直方图进行了图像化的示例。
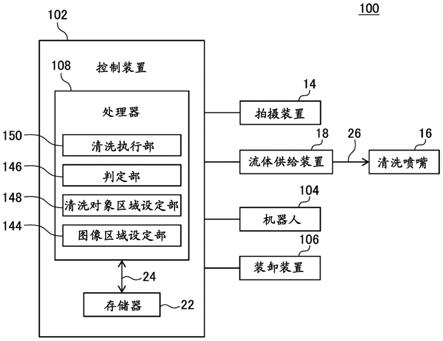
17.图12是其他实施方式涉及的清洗系统的框图。
18.图13是图12所示的清洗系统的概略图。
19.图14是图13所示的装卸装置的放大图。
20.图15表示图13所示的装卸装置把持清洗喷嘴的状态。
21.图16是表示图12所示的清洗系统的动作流程的一例的流程图。
22.图17表示对在图16中的步骤s11中拍摄到的第1图像数据进行了图像化的一例。
23.图18表示对在图16中的步骤s15中拍摄到的第2图像数据进行了图像化的一例。
24.图19是表示图12所示的清洗系统的功能的其他示例的框图。
25.图20是表示图19所示的清洗系统的动作流程的一例的流程图。
26.图21是表示图20中的步骤s31的流程的一例的流程图。
27.图22是表示图20中的步骤s32的流程的一例的流程图。
28.图23是表示图20中的步骤s33的流程的一例的流程图。
29.图24表示另外其他实施方式涉及的清洗系统的概略图。
具体实施方式
30.以下,根据附图对本公开的实施方式进行详细说明。另外,以下说明的各种实施方式中,对同样的要素标注相同的符号,省略重复的说明。首先,参照图1和图2,对一实施方式涉及的清洗系统10进行说明。清洗系统10用于清洗机床50的作业区域62。
31.如图2所示,机床50具有:挡板(splash guard)54、加工头56、伸缩罩(telesco cover)58和加工台60。挡板54是划定内部空间a的中空部件,防止在内部空间a产生的切削液或者切屑等异物向外部泄漏。挡板54具有底壁54a和从该底壁54a向上方立起的侧壁54b。侧壁54b上形成有开口部54c。该开口部54c根据需要通过自动门(未图示)进行开闭。
32.加工头56设置于内部空间a,在其前端安装有工具64。加工头56旋转驱动工具64,对工件进行加工。伸缩罩58是伸缩自如的中空部件,设置于挡板54的底壁54a上。伸缩罩58防止机床50的部件等暴露在异物中。加工台60被设置成在内部空间a能够向水平方向移动,配置于比伸缩罩58靠近上侧的位置。加工台60上可装卸夹具(未图示),该夹具可装卸工件。
33.本实施方式中,机床50的作业区域62是在内部空间a内受针对工件的作业的影响(异物的附着等)的区域,例如,定义为包含挡板54(底壁54a)、伸缩罩58和加工台60(夹具)的区域。
34.如图1所示,清洗系统10具有控制装置12、拍摄装置14、清洗喷嘴16和流体供给装置18。控制装置12控制拍摄装置14和流体供给装置18的动作。具体来说,控制装置12是具有处理器20(cpu、gpu等)和存储器22(rom、ram等)等的计算机。处理器20经由总线24可通信地与存储器22连接,与存储器22进行通信,并且进行用于执行后述的各种功能的运算。
35.另外,控制装置12也可以构成为:通过控制加工头56和加工台的动作,而控制机床50进行的加工动作。或者,也可以设置与控制装置12不同的第2控制装置(未图示),该第2控制装置控制机床50进行的加工动作。该情况下,控制装置12可通信地与该第2控制装置连接。存储器22暂时或者永久性地存储各种数据。
36.拍摄装置14拍摄机床50的作业区域62。作为一例,拍摄装置14是具有ccd或者cmos等拍摄传感器、聚焦透镜等光学透镜和图像处理处理器等的照相机。作为其他示例,拍摄装置14也可以是具有射出激光的激光射出部、接受被物体反射的激光的受光部和从受光部接受到的激光生成图像数据的图像生成部的激光扫描仪式的拍摄装置。
37.作为另外其他示例,拍摄装置14也可以是拍摄被摄体像,并且能够测量到该被摄体像为止的距离的三维视觉传感器。另外,拍摄装置14既可以固定于机床50的内部空间a,
或者,在机床50的挡板54的壁的一部分开放(或者是透明材料)的情况下,拍摄装置14也可以设置于挡板54的外部。代替来说,拍摄装置14也可以凭借后述的机器人向任意的位置和姿势移动。拍摄装置14在来自控制装置12的指令下,拍摄机床50的作业区域62,将拍摄到的图像数据发送给控制装置12。
38.清洗喷嘴16是中空的,在其前端具有喷射口16a。清洗喷嘴16将供给到内部的流体从喷射口16a向预定的喷射方向喷出。另外,清洗喷嘴16也可以固定于内部空间a。该情况下,对清洗喷嘴16进行定位,以使其喷射方向朝向成为清洗对象的作业区域62(例如,加工台60)。代替来说,清洗喷嘴16也可以凭借后述的机器人向任意的位置和姿势移动。
39.流体供给装置18在来自控制装置12的指令下,向清洗喷嘴16供给流体。具体来说,流体供给装置18经由流体供给管26(例如,弹性的管),与清洗喷嘴16流体连结,通过该流体供给管26向清洗喷嘴16的内部供给流体(例如压缩气体或者压缩液体)。清洗喷嘴16将从流体供给管26供给的流体向作业区域62(例如,加工台60)喷出,由此清洗该作业区域62。
40.接下来,参照图3,说明清洗系统10的动作。在处理器20从操作员、上位控制器、或者计算机程序接受到作业开始指令时,开始图3所示的流程。在开始图3所示的流程的时间点,工件没有设置于加工台60,实质上在机床50的作业区域62不存在异物。
41.步骤s1中,处理器20利用拍摄装置14来拍摄作业区域62。本实施方式中,处理器20在拍摄作业区域62前执行模拟加工进程。具体来说,操作员(或者,工件装载用机器人)在加工台60的上表面60a设置夹具,接着,对该夹具设置虚拟工件(dummy work)。该虚拟工件具有与在后述的步骤s2中成为加工对象的工件加工完成后相同的尺寸。
42.并且,处理器20(或者,第2控制装置)按照加工程序使加工头56和加工台60动作。该加工程序包含使加工头56和加工台60动作的指令和从加工流体喷射装置(未图示)喷出加工流体(切削液、冷却剂等)的指令,预先存储在存储器22中。
43.处理器20通过执行加工程序,而使加工头56和加工台60执行与后述的步骤s2相同的动作,并且以与后述的步骤s2相同的时刻和流量从加工流体喷射装置(未图示)喷出加工流体。在加工程序结束时,加工头56和加工台60返回到初始位置。
44.并且,处理器20在最后从加工流体喷射装置喷出加工流体的时间点t1经过了预先设定的时间τ后的时间点t2(=t1+τ),使拍摄装置14拍摄作业区域62。这里,时间τ可以设定成时间点t2成为在模拟加工进程中处理器20结束加工程序后的时间点。
45.例如,拍摄装置14对作业区域62中的、加工台60的上表面60a进行拍摄。或者,拍摄装置14也可以对作业区域62中的挡板54的底壁54a的内面、伸缩罩58的上表面58a和加工台60的上表面60a进行拍摄。
46.拍摄装置14将拍摄到的图像数据id1(第1图像数据)发送给处理器20,处理器20将图像数据id1存储在存储器22中。该图像数据id1是在之后的步骤s2中加工工件前由拍摄装置14拍摄到的作业区域62(例如,上表面60a)的图像数据。图4示出了拍摄装置14拍摄加工台60的上表面60a时获得的图像数据id1的示例。
47.步骤s2中,机床50在作业区域62对工件进行加工。具体来说,操作员(或者,工件装载用机器人)将工具64装配于加工头56,在加工台60的上表面60a设置夹具,接着,对该夹具设置工件。
48.并且,处理器20(或者,第2控制装置)按照上述的加工程序使加工头56和加工台60
动作,从加工流体喷射装置喷出加工流体的同时,利用工具64来加工工件。其结果,切屑等异物堆积在机床50的作业区域62。在该步骤s2中加工程序结束时,加工头56和加工台60返回到与上述的模拟加工进程结束时相同的初始位置。
49.步骤s3中,处理器20控制拍摄装置14来拍摄作业区域62。具体来说,处理器20在步骤s2中最后从加工流体喷射装置喷出加工流体的时间点t1起经过了预先设定的时间τ的时间点t2,执行该步骤s3,使拍摄装置14拍摄作业区域62。例如,拍摄装置14沿着与步骤s1相同的视线方向拍摄加工台60的上表面60a。拍摄装置14将拍摄到的作业区域62的图像数据id2(第2图像数据)发送给处理器20,处理器20将图像数据id2存储到存储器22中。
50.该图像数据id2是在步骤s2中加工了工件后由拍摄装置14拍摄到的作业区域62(例如,上表面60a)的图像数据。图5示出了拍摄装置14拍摄上表面60a时获得的图像数据id2的示例。在加工后拍摄到的图像数据id2中在上表面60a映现出切屑等异物b。
51.步骤s4中,处理器20生成图像数据id3(第3图像数据),所述图像数据id3表示在步骤s1中拍摄到的图像数据id1与在最近的步骤s3中拍摄到的图像数据id2之间的亮度变化的程度。该图像数据id3是具有与图像数据id1和id2相同的像素数n
t
的图像。以下,参照图6~图10,对图像数据id3的生成方法进行说明。
52.图6是示意性地表示对加工前拍摄到的图像数据id1的各像素的亮度进行了数值化的示例的图,图7是示意性地表示对加工后拍摄到的图像数据id2的各像素的亮度进行了数值化的示例的图。另外,图6和图7中,为了容易理解,示出了图像数据id1和id2的像素中的5行
×
5列的像素。
53.处理器20根据图像数据id1和id2,生成图像数据id3。作为对应于图像数据id1像素的亮度br1和该图像数据id1的像素所对应的图像数据id2的像素的亮度br2之间的变化程度的值,通过以下的方法来计算该图像数据id3的各像素的亮度br3。
54.作为一例,处理器20从br3=br
1-br2的数学式(1)求出图像数据id3的各像素的亮度br3。图8示出了从数学式(1)求出亮度br3时的、对图像数据id3的各像素的亮度br3进行了数值化的示意图。
55.例如,对于图像数据id3的第y
n
行、第x
n
列的像素的亮度br3,由于图像数据id1的第y
n
行、第x
n
列的像素的亮度br1是100(图6),图像数据id2的第y
n
行、第x
n
列的像素的亮度br2是与亮度br1相同的100(图7),因此根据数学式(1),br3=br
2-br1=0。也就是说,在使用该数学式(1)时,在加工前的图像数据id1与加工后的图像数据id2中,对应的像素的亮度没有变化时,图像数据id3对应的像素的亮度br3都为零。
56.另一方面,对于图像数据id3的第y
n+2
行、第x
n+4
列的像素,图像数据id1的第y
n+2
行、第x
n+4
列的像素的亮度br1是1(图6),而图像数据id2的第y
n+2
行、第x
n+4
列的像素的亮度br2为与亮度br1不同的255(图7)。这样的亮度br1与br2之间的变化可能由图5所示的异物b所引起。该情况下,图像数据id3的第y
n+2
行、第x
n+4
列的像素的亮度br3根据数学式(1)而成为br3=br
2-br1=254。
57.这样,数学式(1)中,图像数据id3的各像素的亮度br3计算为亮度br1与br2之差,如图8所示,在图像数据id1与id2中像素的亮度没有变化时为零,另一方面,在图像数据id1与id2中像素的亮度有变化时,为零以外的数值。另外,图8中为了容易理解,强调显示具有零以外的亮度br3的像素。
58.作为其他示例,处理器20从br3=(br
1-br2)/2+128的数学式(2)求出图像数据id3的各像素的亮度br3。图9示出了从数学式(2)求出图像数据id3的各像素的亮度br3时的、对该图像数据id3的各像素的亮度进行了数值化的示意图。
59.例如,对于第y
n
行、第x
n
列的像素,由于图像数据id1的亮度br1=100,图像数据id2的亮度br2=100,因此根据数学式(2),br3=(br
1-br2)/2+128=128。也就是说,在使用该数学式(2)时,在加工前的图像数据id1与加工后的图像数据id2中,对应的像素的亮度没有变化时,图像数据id3对应的像素的亮度br3都为128。
60.另一方面,对于第y
n+2
行、第x
n+4
列的像素,由于图像数据id1的亮度br1是1,而图像数据id2的br2是255,因此br3=(br
1-br2)/2+128=255。这样,在数学式(2)中,根据亮度br1与br2之差来计算图像数据id3的各像素的亮度br3,如图9所示,在图像数据id1与id2中像素的亮度没有变化时为128,而在图像数据id1与id2中像素的亮度有变化时,为128以外的数值。
61.作为另外其他示例,处理器20从br3=(br2+1)/(br1+1)的数学式(3)求出图像数据id3的各像素的亮度br3。图10示出了从数学式(3)求出图像数据id3的各像素的亮度br3时的、对该图像数据id3的各像素的亮度进行了数值化的示意图。
62.例如,对于第y
n
行、第x
n
列的像素,由于图像数据id1的亮度br1=100,图像数据id2的亮度br2=100,因此根据数学式(3),br3=br2/br1=1。也就是说,使用该数学式(3)时,在加工前的图像数据id1与加工后的图像数据id2中,对应的像素的亮度没有变化时,图像数据id3对应的像素的亮度br3都为1。
63.另一方面,对于第y
n+2
行、第x
n+4
列的像素,由于图像数据id1的亮度br1是1,而图像数据id2的br2是255,因此br3=br2/br1=128。这样,在数学式(3)中,根据亮度br1与br2的比((br2+1)/(br1+1))来计算图像数据id3的各像素的亮度br3,如图10所示,在图像数据id1与id2中像素的亮度没有变化时为1,而在图像数据id1与id2中像素的亮度有变化时,为1以外的数值。
64.凭借以上那样的方法,处理器20生成表示图像数据id1的亮度br1与图像数据id2的亮度br2之间的变化程度的图像数据id3。因此,处理器20作为图像数据生成部28(图1)发挥功能。处理器20将生成的图像数据id3存储到存储器22中。
65.另外,图8~图10中,为了容易理解,将图像数据id3表示为y列
×
x行的格子状的数据,但是处理器20生成的图像数据id3未必必须成为格子状的数据,例如,也可以是以列表形式存储了像素和亮度br3的数据。
66.再次参照图3,在步骤s5中,处理器20取得在步骤s4中生成的图像数据id3的直方图hg。直方图hg是表示图像数据id3的各像素的亮度br3与像素数n的关系的数据。图11示出了对直方图hg进行了图像化的示例。另外,处理器20也可以只以数值数据的形式取得直方图hg,或者,生成图11所示那样的直方图hg的图像,显示在设置于控制装置12的显示器(未图示)。
67.这里,一般情况下,以0~255的合计256个阶段来显示图像数据中的各像素的亮度。在对使用了数学式(2)的直方图hg进行了图像化时,可以以256个阶段来表示亮度br3,此外,可以将br3=128的位置设为亮度的中位值。因此,根据数学式(2),可以利用已经存在的图像处理程序来显示直方图hg的图像。
68.此外,在以0~255的合计256个阶段显示像素的亮度时,若使用上述的数学式(3),即使亮度br1=0,也可以防止亮度br3为无限大。另外,以1~256的合计256个阶段显示像素的亮度时,数学式(3)可以被规定为br3=br2/br1的数学式。
69.关于该直方图hg,假设在加工前的图像数据id1与加工后的图像数据id2中,对应的像素的亮度没有变化时(即,没有图5所示的异物b时),在直方图hg中,亮度br3成为基准值α0的像素数n与图像数据id3的整体像素数n
t
大致一致(n≈n
t
)(即,因亮度br3=α0,而成为存在像素数n≈n
t
的脉冲(impulse)那样的特性)。在使用了数学式(1)时该基准值α0是零,使用了数学式(2)时该基准值α0是128,使用了数学式(3)时该基准值α0是1。
70.另一方面,在加工前的图像数据id1与加工后的图像数据id2中,对应的像素的亮度有变化时(即,存在图5所示的异物b时),在直方图hg中,在基准值α0以外的亮度br3的范围也存在像素数n。这样,直方图hg是统计性地表示加工前的图像数据id1与加工后的图像数据id2之间的亮度变化的数据。
71.步骤s6中,处理器20根据直方图hg,来判定是否清洗作业区域62。作为一例,处理器20在直方图hg中,在预先设定了亮度br3的范围[α1,α2]内的像素数n
x
相对于整体像素数n
t
的比例r1=n
x
/n
t
为预定的阈值r
th1
以下(r1=n
x
/n
t
≤r
th1
)时,判定为需要清洗作业区域62。
[0072]
对这方面进行具体描述时,如上所述,在加工前的图像数据id1与加工后的图像数据id2中亮度有变化时,代替基准值α0的像素数n变小,像素数n也广泛分布于基准值α0以外的亮度br3的范围内。
[0073]
因此,如图11所示,在以包含基准值α0的方式设定了阈值α1和α2时,图像数据id1与图像数据id2之间的亮度的变化越大(也就是说,图5中的异物b越多),α1≤br3≤α2的范围内的像素数n
x
越是减少。因此,像素数n
x
相对于整体像素数n
t
的比例r1=n
x
/n
t
为定量性地表示图像数据id1与图像数据id2之间的亮度变化的大小,即,加工后的图像数据id2所包含的异物b的多少的数据。
[0074]
处理器20从直方图hg的数据中计算比例r1,在该比例r1为阈值r
th1
以下时,判定为需要清洗作业区域62(即,“是”),向步骤s7转移。另一方面,处理器20在比例r1比阈值r
th1
大时判定为“否”,向步骤s8转移。
[0075]
作为其他示例,处理器20在直方图hg中,亮度br3在范围[α1,α2]外的像素数n
y
相对于整体像素数n
t
的比例r2=n
y
/n
t
为预定的阈值r
th2
以上(r2=n
y
/n
t
≥r
th2
)时,判定为需要清洗作业区域62。
[0076]
这里,图像数据id1与图像数据id2之间的亮度变化越大(也就是说,图5中的异物b越多),α1≤br3≤α2的范围内的像素数n
x
越是减少,另一方面,br3<α1,或者,α2<br3的范围的像素数n
y
越是增加。因此,像素数n
y
相对于整体像素数n
t
的比例r2=n
y
/n
t
为定量地表示加工后的图像数据id2所包含的异物b的多少的数据。处理器20从直方图hg的数据中计算比例r2,在该比例r2为阈值r
th2
以上时,判定为需要清洗作业区域62(“是”)。
[0077]
作为另外其他示例,处理器20提取在步骤s5中取得的直方图hg的曲线(参照图11)的轨迹,计算直方图hg的曲线的轨迹与基准直方图hg
r
的曲线的轨迹的形状的一致度。该基准直方图hg
r
是图像数据id1与图像数据id2之间没有亮度的变化时的直方图。
[0078]
基准直方图hg
r
例如可以利用以下那样的方法取得。具体来说,处理器20在加工前(步骤s1)对图像数据id1进行两次拍摄。并且,处理器20使用在上述步骤s4中描述的方法,
生成表示加工前的两个图像数据id1的亮度变化的程度的基准图像数据id
r
。然后,处理器20从基准图像数据id
r
中取得基准直方图hg
r
。
[0079]
代替来说,基准直方图hg
r
也可以由操作员手动制作。处理器20在该步骤s6中,在直方图hg的曲线的轨迹与基准直方图hg
r
的曲线的轨迹的形状的一致度比预先设定的阈值小时判定为“是”。
[0080]
作为另外其他示例,处理器20计算在步骤s5中取得的直方图hg的标准偏差。处理器20在该步骤s6中,在直方图hg的标准偏差比预先设定的阈值大时,判定为“是”。通过以上那样的方法,处理器20根据直方图hg来判定是否清洗作业区域62(例如上表面60a)。因此,处理器20作为判定是否清洗作业区域62的判定部30(图1)发挥功能。
[0081]
步骤s7中,处理器20执行作业区域62的清洗。具体来说,处理器20使流体供给装置18动作,向清洗喷嘴16供给流体。清洗喷嘴16将从流体供给管26供给的流体向作业区域62(加工台60的上表面60a)喷出,而清洗该作业区域62。步骤s7之后,处理器20返回到步骤s3,在步骤s6判定为“否”之前,反复进行步骤s3~s7的循环。
[0082]
另外,处理器20对执行步骤s7的次数(或者,在步骤s6判定为“是”的次数)m进行计数,在该次数m达到了预定的次数m
max
(例如,m
max
=3)时,发出“清洗次数达到了预定次数”这样的声音或者图像形式的警告信号,可以向步骤s8转移(或者,也可以结束图3的流程)。由此,可以防止执行步骤s7的次数过多。
[0083]
步骤s8中,处理器20例如解析计算机程序,判定是否存在应该加工的其他工件。处理器20在判定为存在应该加工的工件(即,“是”)时,返回到步骤s2,另一方面,在判定为没有应该加工的工件(即,“否”)时,结束图3所示的流程。
[0084]
如上所述,本实施方式中,拍摄装置14在加工前后拍摄图像数据id1和id2,图像数据生成部28生成图像数据id3,判定部30根据直方图hg来判定是否清洗作业区域62。因此,拍摄装置14、图像数据生成部28和判定部30构成判定是否需要清洗机床50的作业区域62的装置70(图1)。
[0085]
本实施方式中,处理器20根据统计性地表示加工前后拍摄到的图像数据id1和id2的亮度的变化的直方图hg,来判定是否清洗作业区域62。根据该结构,可以利用统计性的方法高精度地判定是否需要清洗作业区域62。
[0086]
此外,在本实施方式中,处理器20在直方图hg中,在比例r1为阈值r
th1
以下时,或者,比例r2为阈值r
th2
以上时,判定为需要清洗作业区域62。根据该结构,可以凭借比较简单的算法自动判定是否需要清洗作业区域62。
[0087]
此外,在本实施方式中,处理器20在步骤s1中,执行了模拟加工进程后,使拍摄装置14拍摄图像数据id1。根据该结构,可以将在通过步骤s1拍摄到的图像数据id1与加工后的通过步骤s3拍摄到的图像数据id2之间,映现在这些图像数据的加工台60等的作业区域62的要素的配置和加工流体的方式设为大致相同。因此,可以防止图像数据id3的各像素的亮度br3中包含由作业区域62的要素的配置和加工流体引起的值。
[0088]
接下来,参照图12和图13,对其他实施方式涉及的清洗系统100进行说明。清洗系统100是用于清洗机床50的作业区域62的系统,具有:拍摄装置14、清洗喷嘴16、流体供给装置18、控制装置102、机器人104和装卸装置106。
[0089]
控制装置102控制拍摄装置14、流体供给装置18、机器人104和装卸装置106的动
作。具体来说,控制装置102是具有处理器108(cpu、gpu等)和存储器22(rom、ram等)等的计算机。处理器108经由总线24可通信地与存储器22连接,与存储器22进行通信,并且进行用于执行后述的各种功能的运算。
[0090]
如图13所示,本实施方式中,机器人104是垂直多关节机器人,具有:机器人基部110、旋转体112、机器人臂部114、手腕部116、机器人机械手118和120。机器人基部110固定于工件单元的地板。旋转体112能够绕铅直轴旋转地设置于机器人基部110。
[0091]
机器人臂部114具有能够转动地设置于旋转体112的下腕部122和能够转动地设置于该下腕部122的前端的上腕部124。手腕部116设置于上腕部124的前端,能够转动地支承机器人机械手118和120。
[0092]
机器人基部110、旋转体112、机器人臂部114和手腕部116分别内置有伺服电动机(未图示)。这些伺服电动机在来自控制装置102的指令下,绕驱动轴驱动旋转体112、机器人臂部114和手腕部116,由此使机器人104动作。
[0093]
机器人机械手118具有:固定于适配器126的机械手基部128,所述适配器126设置于手腕部116的前端部;以及多个指部130,其能够开闭地设置于该机械手基部128。机械手基部128内置具有气缸或者电动机的指部驱动部(未图示),指部驱动部在来自控制装置102的指令下,使指部130开闭。由此,机器人机械手118利用指部130来把持或释放清洗喷嘴16。另外,机器人机械手118的指部130可以构成为除了清洗喷嘴16,还能够把持机器人机械手120所把持的工件。
[0094]
另一方面,机器人机械手120具有固定于适配器126的机械手基部132和能够开闭地设置于该机械手基部132的多个指部134。机械手基部132内置具有气缸或者电动机的第2指部驱动部(未图示),该第2指部驱动部在来自控制装置102的指令下,开闭指部134。由此,机器人机械手120利用指部134来把持或释放工件等物体。
[0095]
装卸装置106配置于机床50的内部空间a的预定位置,设置于挡板54的侧壁54b。具体来说,如图14所示,装卸装置106具有:固定于侧壁54b的基部136、能够开闭地设置于该基部136的多个爪部138、以及使该爪部138开闭的爪驱动部140。
[0096]
爪驱动部140具有气缸或者电动机,在来自控制装置102的指令下,自动开闭爪部138。装卸装置106通过闭合爪部138,如图15所示,在该爪部138之间把持清洗喷嘴16。此外,装卸装置106如图14所示通过打开爪部138,而释放把持的清洗喷嘴16。
[0097]
另外,本实施方式中,在爪部138的内面形成平面部138a,而在清洗喷嘴16的侧面形成与该平面部138a面接触的平面部16b。凭借平面部138a和16b的面接触,爪部138可以稳定地把持清洗喷嘴16。另外,也可以在爪部138的平面部138a设置增大与清洗喷嘴16之间的摩擦系数的高摩擦部(凹凸部、橡胶层、高摩擦树脂层等)。
[0098]
此外,清洗系统100还可以具有:鼓风机(blower)(未图示),其对爪部138的内面吹出流体(例如,压缩气体)而将附着于该内面的异物吹飞。该情况下,该鼓风机内置于装卸装置106(例如,基部136),该鼓风机的流体喷射口可以设置于爪部138的内面(例如,平面部138a)。由此,可以防止异物附着于爪部138的内面,因此装卸装置106可以始终以相同的位置和姿势可靠地把持清洗喷嘴16。
[0099]
如图13所示,拍摄装置14经由支架(bracket)142固定于适配器126,利用机器人104向任意的位置和姿势移动。本实施方式中,拍摄装置14是对被摄体像进行拍摄,并且能
够测量到该被摄体像为止的距离的三维视觉传感器。
[0100]
对机器人104设定有机器人坐标系c
r
。机器人坐标系c
r
是为了对机器人104的各可动组件(旋转体112、机器人臂部114、手腕部116)进行自动控制而成为基准的坐标系。本实施方式中,机器人坐标系c
r
被设定成:其原点配置于机器人基部110的中心,其z轴与旋转体112的旋转轴一致。处理器108以机器人坐标系c
r
为基准生成对机器人104的各伺服电动机的指令,使机器人104的各可动组件动作,将拍摄装置14、机器人机械手118和120分别配置成机器人坐标系c
r
中的任意的位置和姿势。
[0101]
机器人104的机器人基部110和旋转体112设置于机床50的挡板54的外部。处理器108使机器人104动作,使拍摄装置14、机器人机械手118和120通过设置于挡板54的侧壁54b的开口部,向机床50的内部空间a进退。
[0102]
接下来,参照图16,对清洗系统100的动作进行说明。在处理器108从操作员、上位控制器、或者计算机程序接受到作业开始指令时,开始图16所示的流程。在开始图16所示的流程的时间点,工件没有设置于加工台60,实质上机床50的作业区域62不存在异物。此外,在开始图16所示的流程的时间点,清洗喷嘴16装配于装卸装置106(图15)。
[0103]
步骤s11中,处理器108利用拍摄装置14来拍摄作业区域62。本实施方式中,处理器108在拍摄作业区域62前执行模拟加工进程。具体来说,操作员(或者,机器人104)在加工台60的上表面60a设置夹具。接着,处理器108使机器人104动作,利用机器人机械手120来把持处于机床50外部的预定保管场所的虚拟工件,通过挡板54的开口部54c,将该虚拟工件搬运至机床50的内部空间a后,设置于夹具。该虚拟工件具有与后述的步骤s14中成为加工对象的工件加工完成后相同的尺寸。
[0104]
并且,处理器108按照加工程序使加工头56和加工台60动作。处理器108通过执行加工程序,而使加工头56和加工台60执行与后述的步骤s14相同的动作,并且以与后述的步骤s14相同的时刻和流量从加工流体喷射装置喷出加工流体。加工程序结束时,加工头56和加工台60返回到初始位置。
[0105]
并且,处理器108在最后从加工流体喷射装置喷出加工流体的时间点t1经过了预先设定的时间τ的时间点t2,开始拍摄装置14进行的拍摄动作。具体来说,处理器108使机器人104动作,将拍摄装置14配置于预定的拍摄位置。例如,拍摄装置14配置于拍摄位置时,拍摄装置14配置于作业区域62的上方(即,机器人坐标系c
r
的z轴正方向),拍摄装置14的视线方向与机器人坐标系c
r
的z轴(即,铅锤方向)平行,作业区域62的挡板54的底壁54a、伸缩罩58的上表面58a和加工台60的上表面60a进入到拍摄装置14的视野中。
[0106]
机器人坐标系c
r
中的拍摄位置的位置数据预先存储在存储器22中。将拍摄装置14配置于拍摄位置时,处理器108使拍摄装置14动作,拍摄作业区域62。拍摄装置14将拍摄到的图像数据id1(第1图像数据)发送给处理器108,处理器108将图像数据id1存储到存储器22中。该图像数据id1是在之后的步骤s14中加工工件前由拍摄装置14拍摄到的作业区域62的图像数据。图17示出了在该步骤s11中拍摄装置14拍摄作业区域62时获得的图像数据id1的示例。
[0107]
步骤s12中,处理器108使拍摄装置14动作,测量作业区域62的高度h。这里,如上所述,作业区域62具有底壁54a、伸缩罩58和加工台60。如图13所示,伸缩罩58的上表面58a处于从底壁54a的内面向上方高出高度h2的位置,此外,加工台60的上表面60a处于从底壁54a
向上方高出高度h3(>h2)的位置。即,作业区域62包含高度h彼此不同的多个区域54a(底壁54a的内面)、区域58a(上表面58a)和区域60a(上表面60a)。
[0108]
拍摄装置14在步骤s11中拍摄图像数据id1,并且测量该图像数据id1所包含的作业区域62的各区域(54a、58a、60a)的高度h。例如,拍摄装置14具有射出激光的激光射出部和接受被作业区域62内的物体反射的激光的受光部。
[0109]
拍摄装置14利用三角测距方式,测量拍摄装置14到作业区域62内的物体的距离。代替来说,拍摄装置14具有两个照相机,可以从由该两个照相机拍摄到的两个图像中,测量到作业区域62内的物体为止的距离。利用这样的方法,拍摄装置14可以分别测量到存在于作业区域62内的区域60a为止的距离d3、到区域58a为止的距离d2和到区域54a为止的距离d1。
[0110]
这些距离d1、d2和d3为表示区域54a、58a和60a的高度h的信息。即,将区域54a设为高度h的基准时,区域58a的高度h2可以通过从距离d1减去距离d2而求出,区域60a的高度h3可以通过从距离d1减去距离d3而求出。
[0111]
作为区域54a、58a和60a的高度h的信息,拍摄装置14可以测量距离d1、d2和d3,也可以测量高度h2和h3。处理器108从拍摄装置14取得该拍摄装置14测量出的高度h的信息,存储到存储器22中。
[0112]
步骤s13中,处理器108在步骤s11中由拍摄装置14拍摄到的图像数据id1中,根据作业区域62的高度h,设定多个图像区域。具体来说,处理器108根据在步骤s12中取得的高度h的信息,从图像数据id1中按高度h提取作业区域62内的各区域。
[0113]
例如,在步骤s12中作为高度h的信息而取得了距离d1、d2和d3时,处理器108从图像数据id1中提取距离d处于预定的范围:d
th1
≤d<d
th2
内的区域。例如,设为区域60a的距离d3满足d
th1
≤d3<d
th2
。该情况下,处理器108从图像数据id1提取映现区域60a的图像区域,设定为高度级别3的图像区域60a’。
[0114]
此外,处理器108从图像数据id1提取距离d处于预定的范围:d
th2
≤d<d
th3
内的区域。例如,设为区域58a的距离d2满足d
th2
≤d2<d
th3
。该情况下,处理器108从图像数据id1提取映现区域58a的图像区域,设定为高度级别2的图像区域58a’。
[0115]
此外,处理器108从图像数据id1提取距离d为预定的范围:d
th3
≤d的区域。例如,设为区域54a的距离d3满足d
th3
≤d3。该情况下,处理器108从图像数据id1提取映现区域54a的图像区域,设定为高度级别1的图像区域54a’。
[0116]
图17中,为了容易理解,通过白色表示图像区域54a’(区域54a),通过浅灰色表示图像区域58a’(区域58a),通过深灰色表示图像区域60a’(区域60a)。划定上述距离d的范围的阈值d
th1
、d
th2
和d
th3
根据拍摄装置14的拍摄位置由操作员预先设定,存储在存储器22中。
[0117]
这样,处理器108基于在步骤s12中取得的高度h的信息(即,距离d),在图像数据id1中,根据作业区域62的高度h来设定多个图像区域54a’、58a’、60a’。因此,处理器108作为设定图像区域60a’、58a’和54a’的图像区域设定部144(图12)发挥功能。
[0118]
另外,处理器108在步骤s12中,即使作为高度h的信息而取得了高度h2和h3时,也与距离d的方法一样,对高度h设定预定的范围,由此,可以从图像数据id1中按高度h来提取作业区域62内的各区域,设定图像区域60a’、58a’和54a’。
[0119]
步骤s14中,处理器108加工工件。具体来说,操作员(或者机器人104)将工具64装
配于加工头56,在加工台60的上表面60a设置夹具。接着,处理器108使机器人104动作,利用机器人机械手120来把持处于机床50外部的预定保管场所的工件,通过挡板54的开口部54c,将该工件搬运到机床50的内部空间a后,设置于夹具。
[0120]
接着,处理器108(或者,上述第2控制装置)按照加工程序使加工头56和加工台60动作,从加工流体喷射装置喷出加工流体,并且利用工具64来加工工件。其结果,异物堆积在机床50的作业区域62。加工程序结束时,加工头56和加工台60返回到与步骤s11的模拟加工进程结束时相同的初始位置。工件的保管在保管场所的工件位置和应该设置该工件的加工台60上的位置在机器人坐标系c
r
中的位置数据被预先存储在存储器22中。
[0121]
步骤s15中,处理器108利用拍摄装置14来拍摄作业区域62。这里,处理器108在步骤s14中最后从加工流体喷射装置喷出加工流体的时间点t1起经过了预先设定的时间τ的时间点t2,开始该步骤s15。
[0122]
具体来说,处理器108使机器人104动作,将拍摄装置14配置于与步骤s11相同的拍摄位置,使拍摄装置14动作而沿着与步骤s11相同的视线方向来拍摄作业区域62。拍摄装置14将拍摄到的图像数据id2(第2图像数据)发送给处理器108,处理器108将图像数据id2存储到存储器22中。
[0123]
该图像数据id2是在步骤s14中加工了工件后由拍摄装置14拍摄到的作业区域62的图像数据。图18示出了在该步骤s15中由拍摄装置14拍摄作业区域62时获得的图像数据id2的示例。在加工后拍摄到的图像数据id2中,在作业区域62(区域54a、58a、60a)映现出异物b。
[0124]
步骤s16中,处理器108对在最近的步骤s15中拍摄到的图像数据id2设定图像区域54a’、58a’、60a’。具体来说,处理器108根据在步骤s13中设定的图像区域54a’、58a’和60a’的设定信息(图像数据内的图像区域54a’、58a’和60a’的边界线的位置数据),与步骤s13同样地对图像数据id2设定图像区域54a’、58a’和60a’。
[0125]
由此,在步骤s13中对图像数据id1设定的图像区域54a’、58a’和60a’在该图像数据id1中的位置与在该步骤s16中对图像数据id2设定的图像区域54a’、58a’和60a’在该图像数据id2中的位置相同。
[0126]
步骤s17中,处理器108判定是否需要清洗高度级别3的区域60a。具体来说,处理器108根据在步骤s11中拍摄到的图像数据id1中的高度级别3的图像区域60a’的图像数据id
1_3
和在最近的步骤s15中拍摄到的图像数据id2中的高度级别3的图像区域60a’的图像数据id
2_3
,来判定是否需要清洗区域60a。
[0127]
具体来说,处理器108将加工前的图像数据id
1_3
的像素的亮度与加工后的图像数据id
2_3
的像素的亮度进行比较,可以从它们的差中检测区域60a内是否存在异物。处理器108在该步骤s17中,检测出区域60a内的异物时,判定为需要清洗区域60a(即,“是”)。
[0128]
处理器108在判定为“是”时向步骤s18转移,另一方面在判定为“否”时向步骤s19转移。这样,本实施方式中,处理器108作为判定部146(图12)发挥功能,所述判定部146根据图像数据id1、id2(具体来说,图像数据id
1_3
、id
2_3
)来判定是否需要清洗作业区域62(区域60a)。
[0129]
步骤s18中,处理器108设定清洗对象区域。具体来说,处理器108自动将在步骤s17中判定为需要清洗的区域60a和高度h比该区域60a低的区域58a以及54a设定为清洗对象区
域。由此,区域60a、58a和54a被设定为清洗对象区域。这样,本实施方式中,处理器108作为清洗对象区域设定部148(图12)发挥功能。
[0130]
步骤s19中,处理器108判定是否需要清洗高度级别2的区域58a。具体来说,处理器108根据在步骤s11中拍摄到的图像数据id1中高度级别2的图像区域58a’的图像数据id
1_2
和在最近的步骤s15中拍摄到的图像数据id2中高度级别2的图像区域58a’的图像数据id
2_2
,来判定是否需要清洗区域58a。
[0131]
具体来说,处理器108将加工前的图像数据id
1_2
的像素的亮度与加工后的图像数据id
2_2
的像素的亮度进行比较,可以从它们的差中,检测区域58a内是否存在异物。处理器108在该步骤s19中,检测出区域58a内的异物时,判定为需要清洗区域58a(即,“是”)。处理器108在判定为“是”时向步骤s20转移,另一方面判定为“否”时向步骤s21转移。
[0132]
步骤s20中,处理器108设定清洗对象区域。具体来说,处理器108自动将在步骤s19中判定为需要清洗的区域58a和高度h比该区域58a低的区域54a设定为清洗对象区域。由此,区域58a和54a被设定为清洗对象区域。
[0133]
这样,处理器108在步骤s17(或者s19)中针对一个区域60a(或者58a)判定为需要清洗时,在步骤s18(或者s20)中,自动将高度h比该一个区域60a(或者58a)低的区域58a和54a(或者54a)与该一个区域60a(或者58a)一起设定为清洗对象区域。
[0134]
步骤s21中,处理器108判定是否需要清洗高度级别1的区域54a。具体来说,处理器108根据在步骤s1中拍摄到的图像数据id1中高度级别1的图像区域54a’的图像数据id
1_1
与在最近的步骤s15中拍摄到的图像数据id2中高度级别1的图像区域54a’的图像数据id
2_1
,来判定是否需要清洗区域54a。
[0135]
具体来说,处理器108将加工前的图像数据id
1_1
的像素的亮度与加工后的图像数据id
2_1
的像素的亮度进行比较,可以从它们的差中检测区域54a内是否存在异物。处理器108在该步骤s21中,检测出区域54a内的异物时,判定为需要清洗区域54a(即,“是”)。处理器108在判定为“是”时向步骤s22转移,另一方面判定为“否”时向步骤s24转移。步骤s22中,处理器108将在步骤s21中判定为需要清洗的区域54a设定为清洗对象区域。
[0136]
步骤s23中,处理器108执行清洗动作。具体来说,首先,处理器108执行使机器人104把持装配于装卸装置106的清洗喷嘴16而从该装卸装置106拆除的拆除动作。该拆除动作中,处理器108使机器人104动作,在打开了指部130的状态下,使机器人机械手118(tcp)移动至用于把持由装卸装置106的爪部138把持的清洗喷嘴16的把持位置。
[0137]
机器人机械手118配置于把持位置时,被装卸装置106的爪部138把持的清洗喷嘴16配置在机器人机械手118的指部130之间,清洗喷嘴16的平面部16b面向指部130的内面。把持位置在机器人坐标系c
r
中的位置数据预先存储在存储器22中。
[0138]
接着,处理器108闭合指部130,利用该指部130来把持清洗喷嘴16的平面部16b。接着,处理器108驱动装卸装置106的爪驱动部140,打开爪部138。这样,机器人104将清洗喷嘴16从装卸装置106拆除。
[0139]
清洗喷嘴16的拆除动作后,处理器108针对在步骤s18、s20、或者s22中设定的清洗对象区域,执行清洗动作。例如,在步骤s18后执行步骤s23时,处理器108以高度h从高到低的顺序,即,区域60a
→
区域58a
→
区域54a的顺序,针对设定为清洗对象区域的区域60a、58a和54a执行清洗动作。
[0140]
具体来说,处理器108使机器人104动作,使机器人机械手118所把持的清洗喷嘴16向区域60a移动,并且使流体供给装置18动作而从清洗喷嘴16喷出流体,利用喷出的流体来清洗整个区域60a。接着,处理器108利用机器人104使清洗喷嘴16向区域58a移动的同时,从清洗喷嘴16喷出流体,清洗整个区域58a。
[0141]
接着,处理器108利用机器人104使清洗喷嘴16向区域54a移动的同时从清洗喷嘴16喷出流体,清洗整个区域54a。另外,分别清洗区域60a、58a和54a时机器人104使清洗喷嘴16(或者,tcp)移动的移动路径(或者清洗位置)可以预先由计算机程序规定。
[0142]
另一方面,在步骤s20后执行步骤s23时,处理器108以高度h从高到低的顺序,即,区域58a
→
区域54a的顺序,针对设定为清洗对象区域的区域58a和54a执行清洗动作。此外,在步骤s22后执行步骤s23时,处理器108针对区域54a执行清洗动作。
[0143]
这样,处理器108执行如下清洗动作:利用机器人104使清洗喷嘴16向作业区域62(区域60a、58a、54a)移动的同时,从清洗喷嘴16喷出流体而清洗作业区域62。因此,处理器108作为执行清洗动作的清洗执行部150(图12)发挥功能。步骤s23后,处理器108返回到步骤s15,在通过步骤s21判定为“否”之前,反复进行步骤s15~s23的循环。
[0144]
另外,处理器108对执行了步骤s23的次数(或者,通过步骤s17、s19或者s21判定为“是”的次数)m进行计数,在该次数m达到了预定的次数m
max
(例如,m
max
=3)时,发出“清洗次数达到了预定次数”这样的声音或者图像的形式的警告信号,可以向步骤s24转移(或者,也可以结束图16的流程)。由此,防止步骤s23的执行次数过多。
[0145]
在步骤s21中判定为“否”时,处理器108执行将清洗喷嘴16装配于装卸装置的装配动作。具体来说,处理器108使机器人104动作,将把持清洗喷嘴16的机器人机械手118(tcp)配置于装配位置。此时,装卸装置106的爪部138为打开的状态。
[0146]
在机器人机械手118配置于装配位置时,装卸装置106的爪部138的平面部138a面向机器人机械手118把持的清洗喷嘴16的平面部16b。接着,处理器108驱动装卸装置106的爪驱动部140,闭合爪部138而把持清洗喷嘴16后,打开机器人机械手118的指部130。这样,处理器108利用机器人104将清洗喷嘴16装配于装卸装置106。
[0147]
步骤s24中,处理器108与上述步骤s8同样地,判定是否存在应该加工的其他工件,判定为“是”时返回到步骤s14,在通过步骤s24判定为“否”之前,反复进行步骤s14~24的循环。另一方面,处理器108在通过步骤s24判定为“否”时,结束图16所示的流程。
[0148]
如上所述,本实施方式中,处理器108使机器人104执行清洗喷嘴16的拆除动作以及针对作业区域62的清洗动作。根据该结构,可以利用机器人104来操作清洗喷嘴16而清洗机床50的作业区域62,因此可以提升清洗作业的效率。
[0149]
此外,本实施方式中,清洗喷嘴16设置于机床50的内部空间a。根据该结构,由于不需要将清洗喷嘴16和流体供给管26搬入和搬出到机床50,因此可以提升清洗作业的效率,并且可以防止清洗用的流体从清洗喷嘴16或者流体供给管26向机床50外部泄漏。此外,可以简化机床50的内部空间a中的流体供给管26的配管。
[0150]
此外,本实施方式中,处理器108针对一个区域60a(或者58a)判定为需要清洗时,自动将高度h比该一个区域60a(或者58a)低的区域58a和54a(或者54a)与该一个区域60a(或者58a)一起设定为清洗对象区域(步骤s18、s20)。
[0151]
并且,处理器108以高度h从高到低的顺序针对设定为清洗对象区域的区域60a、
58a、54a执行清洗动作。根据该结构,处理器108可以最佳化针对作业区域62的清洗动作的次数。具体描述时,利用从清洗喷嘴16喷出的流体来清洗一个区域时吹飞的异物b最终因重力,可能飞散至高度比该一个区域低的区域。
[0152]
因此,假设在区域58a后清洗区域60a时,从区域60a吹飞的异物b可能堆积在清洗完成的区域58a。如本实施方式这样,以高度h从高到低的顺序针对多个区域60a、58a、54a执行清洗动作,可以有效地清洗该多个区域60a、58a、54a。
[0153]
此外,本实施方式中,机器人104具有清洗喷嘴把持用的机器人机械手118和工件装载用的机器人机械手120。因此,可以利用一台机器人104执行各种作业,因此可以实现作业的效率化,并且可以削减制造成本。另外,在图16所示的流程中,处理器108可以在每当对n个(例如,n=20)工件进行加工时,执行步骤s15~23的循环。
[0154]
另外,也可以将上述的装置70应用于清洗系统100。以下,参照图19,对清洗系统100的其他功能进行说明。本实施方式中,处理器108作为图像数据生成部28发挥功能。因此,拍摄装置14、图像数据生成部28和判定部146构成装置70。
[0155]
接下来,参照图20,对清洗系统100的动作的其他示例进行说明。图20所示的流程与图16所示的流程的差异在于步骤s31、s32和s33。具体来说,步骤s16后,在步骤s31中,处理器108执行高度级别3清洗判定方案。参照图21对该步骤s31进行说明。
[0156]
步骤s41中,处理器108作为图像数据生成部28发挥功能,生成图像数据id
3_3
(第3图像数据),所述图像数据id
3_3
表示在步骤s11中拍摄到的图像数据id1中高度级别3的图像区域60a’的图像数据id
1_3
和在最近的步骤s15中拍摄到的图像数据id2中高度级别3的图像区域60a’的图像数据id
2_3
之间的亮度变化的程度。
[0157]
具体来说,处理器108与上述的步骤s4同样地,使用数学式(1)、数学式(2)、或者数学式(3),求出图像数据id
3_3
的各像素的亮度br3,由此,生成具有与图像数据id
1_3
和id
2_3
相同的像素数的图像数据id
3_3
。图像数据id
3_3
的各像素的亮度br3为对应于图像数据id
1_3
的像素的亮度br1和该图像数据id
1_3
的像素所对应的图像数据id
2_3
的像素的亮度br2之间的变化程度的值。
[0158]
步骤s42中,处理器108取得在步骤s41中生成的图像数据id
3_3
的直方图hg3。该直方图hg3是表示图像数据id
3_3
的各像素的亮度br3与该图像数据id
3_3
的像素数n的关系的数据。步骤s43中,处理器108作为判定部146发挥功能,使用与上述的步骤s6一样的方法,根据直方图hg3来判定是否需要清洗高度级别3的区域60a。
[0159]
作为一例,处理器108与上述的步骤s6同样地,在直方图hg3中,在预先设定了亮度br3的范围[α
1_3
,α
2_3
]内的像素数n
x_3
相对于整体像素数n
t_3
的比例r
1_3
=n
x_3
/n
t_3
为预定的阈值r
th1_3
以下时,判定为需要清洗高度级别3的区域60a(即,“是”)。作为其他示例,处理器108在直方图hg3中,在亮度br3为范围[α
1_3
,α
2_3
]外的像素数n
y_3
相对于整体像素数n
t_3
的比例r
2_3
=n
y_3
/n
t_3
为预定的阈值r
th2_3
以上时,判定为“是”。
[0160]
作为另外其他示例,处理器108在直方图hg3的曲线的轨迹与基准直方图hg
r_3
的曲线的轨迹的一致度比预先设定的阈值小时,判定为“是”。作为另外其他示例,处理器108在直方图hg3的标准偏差比预先设定的阈值大时判定为“是”。处理器108在通过该步骤s43判定为“是”时,向图20中的步骤s18转移,另一方面判定为“否”时,向图20中的步骤s32转移。
[0161]
步骤s32中,处理器108执行高度级别2清洗判定方案。参照图22对该步骤s32进行
中,在亮度br3为范围[α
1_1
,α
2_1
]外的像素数n
y_1
相对于整体像素数n
t_1
的比例r
2_1
=n
y_1
/n
t_1
为预定阈值r
th2_1
以上时,判定为“是”。
[0170]
作为另外其他示例,处理器108在直方图hg1的曲线的轨迹与基准直方图hg
r_1
的曲线的轨迹的一致度比预先设定的阈值小时,判定为“是”。作为另外其他示例,处理器108在直方图hg1的标准偏差比预先设定的阈值大时,判定为“是”。处理器108在该步骤s63中判定为“是”时,向图20中的步骤s22转移,另一方面判定为“否”时,向图20中的步骤s24转移。
[0171]
这样,本实施方式中,处理器108按步骤s16中设定的图像区域60a’、58a’和54a’取得直方图hg3、hg2和hg1,根据该直方图hg3、hg2和hg1,针对各区域60a、58a和54a判定是否需要清洗。根据该结构,可以针对各区域60a、58a和54a通过统计性方法高精度地判定是否需要清洗。
[0172]
另外,清洗系统100也可以具有多个清洗喷嘴和多个装卸装置。图24示出了这样的方式。图24所示的清洗系统100’与上述的清洗系统100的不同点在于具有多个清洗喷嘴16a和16b、多个装卸装置106a和106b。流体供给装置18经由流体供给管26a向清洗喷嘴16a供给流体,并且经由流体供给管26b向清洗喷嘴16b供给流体。
[0173]
装卸装置106a和106b分别设置于挡板54的、在机器人坐标系c
r
的x轴方向彼此对置的侧壁54b。清洗喷嘴16a能够拆除地装配于装卸装置106a,另一方面,清洗喷嘴16b能够拆除地装配于装卸装置106b。
[0174]
处理器108将作业区域62分割成机器人坐标系c
r
的x轴负方向侧的区域62a和x轴正方向侧的区域62b,在使机器人104把持清洗喷嘴16a而利用该清洗喷嘴16a清洗了区域62a后(或者,清洗前),使机器人104把持清洗喷嘴16b利用该清洗喷嘴16b来清洗作业区域62。
[0175]
例如,处理器108分别针对区域62a和区域62b执行图16或者图20所示的流程,由此,分别清洗区域62a和62b。在针对区域62a执行图16或者图20所示的流程时,在步骤s11和s15中,处理器108利用拍摄装置14来拍摄区域62a。
[0176]
另一方面,在针对区域62b执行图16或者图20所示的流程时,在步骤s11和s15中,处理器108利用拍摄装置14来拍摄区域62b。根据本实施方式,可以使用不同的清洗喷嘴16a和16b,可靠地针对作业区域62的区域62a和62b执行清洗动作。
[0177]
另外,上述的清洗系统100或者100’中,对拍摄装置14是能够测量到被摄体像为止的距离的三维视觉传感器的情况进行了描述,但是不限于此,清洗系统100或者100’还具有测量作业区域62的高度h的高度测量器,拍摄装置14是能够拍摄图像数据的照相机。
[0178]
此外,上述实施方式中,对作业区域62包含3个阶段的高度级别的区域54a、58a、60a的情况进行了描述,但是不限于此,可以理解为作业区域62可以包含任何数量的高度级别的区域。此外,上述实施方式中,作为构成高度级别不同的区域54a、58a、60a的要素,例示出底壁54a、伸缩罩58和加工台60,但是作业区域62也可以具有与底壁54a、伸缩罩58和加工台60不同的任何要素。
[0179]
此外,上述的清洗系统10、100、或者100’也可以具有多个拍摄装置14a和14b。例如,拍摄装置14a拍摄作业区域62的局部区域(例如,上述的区域62a),而拍摄装置14b可以拍摄作业区域62的其他区域(例如,上述的区域62b)。
[0180]
此外,还可以设置拍摄辅助用光源(未图示),在上述的步骤s1、s3、s11或者s15中
利用拍摄装置14、14a、14b拍摄作业区域62时,所述拍摄辅助用光源用于增加照射该作业区域62的光。该拍摄辅助用光源是荧光灯或者led等,可以一体地组装到拍摄装置14、14a、14b,或者,可以与拍摄装置14、14a、14b分开设置。
[0181]
此外,上述实施方式中,对处理器20在步骤s1和s11中执行模拟加工进程的情况进行了描述。但是,处理器20例如可以在上述步骤s2或者s14中没有使用加工流体时,在步骤s1或者s11中不执行模拟加工进程,使拍摄装置14拍摄作业区域62。
[0182]
此外,在上述步骤s1或者s11中执行的模拟加工进程中,在执行该模拟加工进程时工具64没有接触,可以使用任何形状的虚拟工件。此外,步骤s1或者s11中,执行模拟加工进程后在拆除虚拟工件后拍摄作业区域62,接着,在上述的步骤s3或者s15中,可以在将步骤s2或者s14的加工后的工件从夹具拆除后拍摄作业区域62。
[0183]
此外,清洗系统100执行图16所示的流程时,表示加工前的状态的图像数据id1未必在步骤s11中利用拍摄装置14来拍摄,例如,也可以由操作员制作成计算机图形的图像数据。此外,上述的机器人104也可以是水平多关节机器人、并行链接机器人等任何类型的机器人。以上,通过实施方式对本公开进行了说明,但是上述实施方式并非限定请求专利保护的范围相关的发明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1