用于机床的联轴器的制作方法
1.本发明涉及一种用于将刀具支架与机床的电机轴连接的联轴器。
背景技术:
2.联轴器用于多个机床(例如钻床、车床、磨床等),在机床中将旋转刀具连接到机床的驱动轴(例如电机轴或齿轮箱的输出轴)。在此,刀具可以装配在短的轴上,该短的轴被称为刀具支架(刀具保持器、tool holder)。机床的驱动轴通常也称为主轴并且具有如下机构,借助该机构可以将刀具支架连同刀具与电机轴机械地耦联。该机构例如包括夹钳(夹头、collet),该夹钳被构造用于抓取刀具支架的紧固螺栓(拉钉、pull stud),并且将刀具支架摩擦接合的方式与电机轴连接。
3.刀具支架与电机轴之间的摩擦接合的连接通常借助锥体配合座(kegelsitz)实现。因此,刀具支架也经常被称为刀具锥(刀具锥、tool cone)。夹钳例如可以气动地操纵。在这种情况下,气动的致动器利用夹钳将刀具锥(在紧固螺栓上)拉向电机轴(主轴)中的对应的内锥体,由此产生电机轴与刀具锥之间的摩擦接合的耦联。
4.在小型的、紧凑地构造的机床中,用于所提到的操纵夹钳的致动器的空间比较小;并且由于这个原因,可用于将刀具锥夹紧在主轴中的可产生的致动器力也相对较小。这导致,刀具锥与主轴之间的锥体配合不能传递足够的转矩,并且存在锥体配合座开始滑动的危险。
技术实现要素:
5.因此,本发明的一个任务在于,提供一种用于机床的联轴器,该联轴器在结构尺寸相对小的情况下能够实现主轴与刀具支架之间的毫无问题的转矩传递。
6.上述任务通过根据权利要求1和8所述的装置来实现。多个实施方式和改进方案是从属权利要求的主题。下文描述一种装置,根据一个示例性实施例,其具有用于机床的主轴、携动环(mitnehmerring)和刀具支架。携动环这样支承在主轴上,使得该携动环可沿着主轴的旋转轴线移动。主轴和刀具支架具有互相配合的面,这些面构造成在(相互)装配的状态下形成摩擦接合的连接。在装配状态下,刀具支架和携动环的相对置的面具有互相配合的轮廓,由此使携动环可卡锁在刀具支架上。
7.根据另一实施例,所述装置具有用于机床的主轴、支承在主轴上的携动环和刀具支架。主轴构造为具有内锥体的空心轴。携动环沿着主轴的旋转轴线是可移动的,并且刀具支架具有一内锥体配合的外锥体,其中,内锥体和外锥体在装配状态下形成锥体配合,并且其中,在装配状态下刀具支架的和携动环的相对置的面具有互相配合的轮廓,从而携动环能够卡锁在刀具支架上。
8.在一个示例性实施例中,锥体配合在装配状态下在主轴和刀具支架之间形成摩擦接合的连接,而卡锁的携动环还在主轴和刀具支架之间形成形状锁合的连接。根据一个示例性实施例,刀具支架可以具有紧固螺栓,该紧固螺栓被这样地成形,使得刀具支架在紧固
螺栓上可以借助夹钳被压靠到主轴上。
9.根据一个示例性实施例,刀具支架可以具有板,该板相对于刀具支架的旋转轴线沿径向方向延伸并且该板在与携动环对置的表面上具有几何结构(例如呈接片或类似物的形式)。携动环可以在其与板相对的表面上具有几何结构(例如呈槽或类似物的形式),其中板的表面上的几何结构和携动环的表面上的几何结构具有互相配合的轮廓,使得携动环的表面上的几何结构能够卡锁到板的表面上的几何结构中。
10.在一个示例性实施例中,在主轴和携动环之间起作用的弹簧元件将携动环压靠到刀具支架上。根据一个示例性实施例,携动环可以具有如下滑动件,所述滑动件可移动地布置在主轴中的配合的引导槽中。主轴可以(例如在引导槽中)具有两个端部止挡,它们在两个方向上限制携动环的运动。
附图说明
11.以下借助附图中所示的示例详细解释不同的实施例。所述图示不一定按比例绘制,并且本发明不仅限于所示出的方面。更确切地说,值得注意的是,示出所示实施例所基于的原理。附图示出:
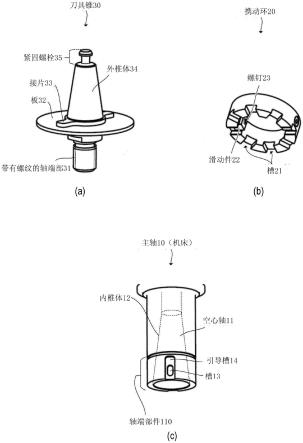
12.图1示出了作为根据一个示例性实施例的联轴器的部件的刀具锥(图解a)、携动环(图解b)和机床的主轴的端部(图解c)。
13.图2-5分别以横截面视图(图解a)、纵剖面视图(图解b)和侧视图(图解c)示出图1中的联轴器在刀具锥和主轴耦联时处于不同位置的部件。
具体实施方式
14.图1示出了根据一个示例性实施例的刀具锥30(图解a)、携动环20(图解b)和机床的主轴10的端部件(图解c)。在耦联状态下(即在刀具装配在机床上的情况下),刀具锥30和主轴10借助锥体配合座耦联,其中,携动环20除了在锥体配合座中的摩擦接合的连接之外还通过以下方式防止刀具锥30的滑转,即,该携动环在主轴10与刀具30之间形成形状锁合的连接。下文将解释本文描述的示例的各个部件,并且接下来将参照图2-5描述刀具锥30和主轴10的耦联。
15.对于图1,图解a示出了刀具锥30的一个示例性实施例。因此,刀具锥30是具有外锥体34的短轴,该外锥体配合到主轴10中的对应的内锥体中并且在装配状态下形成锥体配合座。在轴的第一端部上定位有紧固螺栓35,该紧固螺栓可以被对应的夹钳(未示出)抓握。螺纹31可以布置在轴的第二端部上,该螺纹允许装配可旋转的刀具(未示出,例如砂轮)。刀具与刀具锥借助螺纹所实现的(螺纹)连接是常见的技术并且因此在此不再进一步描述。代替螺纹连接也可以使用其它连接技术(卡口式连接、夹紧连接等)。
16.在刀具锥30的中间区域中,该刀具锥具有板32,该板大体上垂直于刀具锥30的旋转轴线延伸。板32可以在外部具有圆形的轮廓,然而这不是必须的。在面向主轴10的一侧(在安装状态下),板在其表面上具有接片33,所述接片允许板32和携动环20之间的卡锁连接。
17.对于图1,图解b示出所提到的携动环20的一个示例性实施例,所述携动环沿着旋转轴线可移动地支承在主轴10上(并且例如沿着所述旋转轴线被引导)。携动环20在其内侧
具有两个或者多个滑动件22(滑动块件),借助所述滑动件可以将携动环20导入到主轴10的对应的槽内。这种引导能够实现携动环20沿着旋转轴线的移动,其中,携动环20的可能的移动行程通过两个端部止挡件限制。在其下侧(即面向刀具锥30的板32的一侧)上,携动环20具有多个槽21,板32的所提及的接片33可卡锁到这些槽中,由此在刀具锥30的板32与支承在主轴10上的携动环20之间构成形状锁合的连接。在主轴10旋转时,支承在主轴10上的携动环20也旋转,并且该携动环由于形状锁合的连接而携动刀具锥30。由此防止锥体配合座的滑转。
18.为了使携动环20可靠地卡锁到板32的接片33中,借助弹簧元件(参见图2-5)将携动环20压靠到板32上。应当理解,携动环20与刀具锥30的板32之间的形状锁合的连接不必借助相对应的接片和槽来实现。替代地,互相配合的销和孔、互相配合的卡锁凸块和凹部等也是可能的。通常,携动环20和板32在相对的表面上具有互相配合的轮廓,这些轮廓可以彼此锁定,进而形成形状锁合的连接。互相匹配的轮廓的具体设计并不重要并且可以以许多不同的方式实现。
19.对于图1,图解c示出机床的主轴10的一个示例性实施例。根据所示的示例,主轴10基本上具有空心轴11,其中,空心轴11的内部具有内锥体12,该内锥体与刀具锥30的外锥体34相匹配。如所提及的那样,在装配状态下,内锥体12和外锥体34形成锥体配合。主轴10具有两个对置的引导槽14,在引导槽中(在装配携动环20的情况下)携动环20的滑动件22可以沿着主轴10的旋转轴线移动地被布置。在所示的示例中,在引导槽14的底部上存在另外的槽13。在携动环20被装配时,螺钉23延伸穿过滑动件22,这些螺钉被旋入到槽13内。携动环20可以沿旋转轴线移动,直至螺钉23的下端部贴靠在槽13的一个端部上。在所提供的示例中,槽13(与螺钉23一起)形成限制携动环20移动的端部止挡。应当理解,也可以以其它方式实现端部止挡。对于所述示例性实施例的功能重要的是携动环20在主轴10上的支承,这种支承能够实现携动环20沿着旋转轴线的移动。如所提到的那样,弹簧(在图1中未示出)可以将携动环20压靠到下部的端部止挡(即远离机床)上,以便保证可靠的卡锁。
20.图2-5示出在耦联过程期间刀具锥30(相对于主轴10)的不同位置,在该耦联过程中刀具锥30与主轴10机械地耦联。在图2至图5中,图解a示出了通过刀具锥30的横截面,图解b示出了对应的纵截面,并且图解c示出了所属的侧视图。如果机床由机器人引导并且刀具锥30连同刀具以适当的方式例如在一个库中准备就绪地保持,则耦联过程可以全自动地执行。
21.在图2中示出的情况中,刀具锥30大约三分之一地引入到主轴10中。紧固螺栓35位于空心轴11的内部并且可以在该位置中被同样布置在空心轴11的内部中的夹钳(未示出)抓握。具有夹紧机构的机床本身是已知的,该夹紧机构具有布置在主轴中的夹钳,因此这里不进一步讨论。为了进一步讨论,可以假设,刀具锥30在紧固螺栓35上借助夹钳被拉入到主轴中,直到刀具锥30的外锥体34机械接触主轴10的内锥体12。
22.在图2的图解b中示出了携动环20的上述引导、尤其是配合到槽13中的滑块22和螺钉23。携动环20通过弹簧元件25压向下部的端部止挡。同样在图2中的图解b中示出了用于在机床中支承主轴10的球轴承15。在这种情况下,主轴10(以及因此的驱动齿环)相对于盘32(以及接片33)的角度位置可以是随机的,并且通常刀具锥30将相对于主轴10旋转,使得驱动齿环20不能立即锁合在盘32上。弹簧元件25可以是任意可挠曲的(弹性的)机械元件,
例如弹簧垫圈,尤其是多波形弹簧垫圈,盘簧或类似部件,或者也可以是一片弹性塑料。
23.在图3中示出的情况中,刀具锥30完全地导入到主轴10中,从而刀具锥30的外锥体34在主轴10的内部机械地接触内锥体12。刀具锥30借助夹钳(在图3中未示出)保持在紧固螺栓上,并且夹钳将刀具锥30拉入到主轴中。在此,板32的各接片33在没有卡锁的情况下克服弹簧元件25的弹簧力向上挤压携动环20。在图3中的图解b所示的位置中,携动环20移动到接近上面的端部止挡上。在图3中,图解a也示出了刀具锥30相对于携动环20的角度位置φ。携动环20与接片33之间的卡锁在角度φ=0
°
、φ=45
°
、φ=90
°
等的情况下是可能的。在图2和图3中,角度φ大约等于20
°
。在图3中所示的情况下,刀具锥30与主轴10机械耦合,其中,连接仅通过摩擦接合保持在锥体配合中,而不是通过携动环20固定(因为携动环20还没有卡锁)。力(参见图3,力f)由在图中未示出的致动器产生,该致动器借助夹钳将刀具支架30的外锥体34压靠到主轴的内锥体12上。如所提及的那样,合适的夹紧机构本身是已知的并且因此在此不详细阐述。
24.如果在机床运行(例如磨削、抛光、铣削等)时,在锥体配合中的摩擦锁合不足以传递所需的转矩,那么刀具锥30开始在主轴中滑动,由此刀具锥30相对于主轴10扭转。换言之,角度φ变化。刀具锥30将如此程度地扭转,直至达到一个角度位置φ,该角度位置能够实现携动环到接片33中的卡锁。图4示出了在即将卡锁之前的这种情况(φ=0
°
)。在图4中所示的情况下,刀具锥相对于主轴的角度位置是这样的,即,弹簧元件25可以将携动环20压靠到板32上,直到接片33嵌合到携动环20的槽21中并且携动环20卡锁。图5示出已卡锁的状态,在该状态下携动环20又大致处于其下端部位置并且保证主轴10与刀具锥30之间的形状锁合的连接。在这种情况下,刀具锥30不能继续扭转。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1