一种解锁按键组装设备的制作方法
1.本技术涉及安全带锁扣组装技术领域,尤其是涉及一种解锁按键组装设备。
背景技术:
2.目前随着人们日益增长的物质生活水平不断提高,汽车的拥有量越来越多。对于开车而言必须系带安全带,安全带是人们驾驶汽车时给予了人们的一种安全保障。
3.一般安全带是由安全带锁扣控制锁定的,如图1至图4所示,安全带锁扣包括壳体1、设置于壳体1内的卡扣21件2、设置于卡扣21件2上的锁止弹簧11和于锁止弹簧11连接的解锁按键3,解锁按键3通过栓机轴12插入壳体1的安装孔121内与壳体1相连接,用户可通过按压解锁按键3以控制卡扣21件2的复位脱离。
4.解锁按键3又包括按钮31、活动块32及转动连接于按钮31和活动块32之间的转动板33,壳体1上开设有供转动板33转动的安装槽16,按钮31、活动块32之间开设有抵接转动板33宽度方向两端的抵接槽332。按钮31上套设有橡胶圈321,转动板33上开设有供橡胶圈321卡入的连接槽333。按钮31上靠近壳体1的一端开设有供活动块32放入的装配槽313,按钮31上设有与装配槽313相邻且供活动块32滑入的滑槽314,活动块32带动转动板33转动以限制按钮31的按键行程,按钮31按压控制卡扣21件2的复位脱离,按钮31上开设有供栓机轴12两端的端部滑入并转动的解锁槽311。通常采用手工组装的方式将转动板33安装入壳体1上,再将活动块32滑移安装于按钮31的装配槽313内。再将解锁按键3倾斜后,使得按钮31上的导向块312对准装配好的壳体1,再推动倾斜的解锁按键3以使导向块312卡入导向槽15内。手动按压按钮31位于壳体1内的端部,以将解锁按键3卡接至壳体1上,实现解锁按键3于壳体1上的安装。
5.上述相关技术中,发明人认为:手工组装解锁按键于壳体上较为费时费力,且组装过程较为麻烦,使得解锁按键的组装效率较低。
技术实现要素:
6.为了提高解锁按键的组装效率,本实用新型的目的是提供一种解锁按键组装设备。
7.本技术提供的一种解锁按键组装设备采用如下的技术方案:
8.一种解锁按键组装设备,包括机架、设置于所述机架上的轮盘、驱动所述轮盘转动的旋转气缸,所述轮盘上设有夹取按钮的机械手一,所述机架的一侧设有朝向所述机械手一的承载装置,所述承载装置用于固定安全带锁扣的壳体,所述机架上设有推动所述旋转气缸带动所述机械手一朝承载装置移动的推动装置,所述轮盘上设有与所述机械手一相邻的按压装置,所述按压装置用于按压按钮将解锁按键卡接至壳体上。
9.通过采用上述技术方案,当将解锁按键安装至壳体上时,将壳体固定于承载装置上,启动机械手一将按钮进行夹取。再通过旋转气缸带动轮盘逆时针转动,使得机械手一和按钮在轮盘上呈倾斜向上的状态。启动推动装置带动机械手一和按压装置朝承载装置移
动,以使壳体上栓机轴两端的端部滑入按钮的解锁槽内。再启动按压装置,将按钮上翘起的端部朝壳体按压,使得栓机轴两端的端部卡接至解锁槽内,实现解锁按键卡接至壳体上。因此通过设置机械手,利用旋转气缸和按压装置的配合,使得按钮旋转后解锁槽对准导栓机轴两端的端部,以便按钮卡入壳体,再通过按压装置的按压,使得栓机轴两端的端部卡入解锁槽内,实现解锁按键自动安装至壳体上,缩短解锁按键安装于壳体上的时间,从而提高解锁按键的组装效率。
10.可选的,所述机架上设有立柱,所述立柱上横向设置有滑轨,所述推动装置包括滑移于滑轨上的推动板、驱动所述推动板带动所述机械手一移动的推动气缸,所述推动板固定连接于所述轮盘和所述旋转气缸之间。
11.通过采用上述技术方案,当旋转气缸带动按钮进行旋转后,启动推动气缸带动推动板进行推动,使得推动板沿着滑轨朝承载装置的方向移动,直至按钮上的导向块卡入导向槽内,实现倾斜状态的按钮和壳体的卡接。因此通过设置推动板,利用推动气缸推动机械手一和按压装置朝承载装置移动,使得栓机轴两端的端部滑入解锁槽内,以使按钮卡入壳体,从而便于按钮于壳体上的安装。
12.可选的,所述按压装置包括竖直设置于所述轮盘背对所述推动板一侧的按压气缸、固定连接于所述按压气缸活塞杆上的按压柱,所述按压柱位于按钮靠近所述承载装置一端的正上方。
13.通过采用上述技术方案,当对倾斜状态的按钮进行按压时,按钮倾斜卡入壳体上,按压气缸活塞杆推动按压柱朝按钮移动。直至按压柱抵接于按钮靠近承载装置的一端,使得按钮朝壳体移动,将栓机轴两端的端部滑入解锁槽内,实现按钮于壳体的卡接。因此通过设置按压柱,利用按压气缸推动按压柱将壳体上的栓机轴滑入按钮上的解锁槽内,实现按钮和壳体的卡接安装,从而便于将按钮安装于壳体上。
14.可选的,所述滑轨上靠近所述承载装置的一端设有将栓机轴于安装孔内进行扶正的定位装置,所述定位装置包括设置于所述滑轨上的夹持气缸、设置于所述夹持气缸两侧的夹持块、驱动所述夹持气缸朝壳体移动的定位气缸,所述定位气缸推动所述夹持气缸带动所述夹持块与栓机轴的两端相抵接。
15.通过采用上述技术方案,当将倾斜状态的按钮卡入壳体上时,定位气缸驱动夹持气缸沿竖直方向朝壳体移动,夹持气缸驱动夹持块夹紧,以将夹持块抵接于栓机轴两端的端部,将栓机轴于壳体的安装孔内进行扶正,实现栓机轴于壳体内的定位。因此通过设置夹持块,利用定位气缸推动夹持块将栓机轴于安装孔内进行扶正,以便倾斜的按钮朝壳体推动时,按钮上的解锁槽能够对准栓机轴的端部,使得栓机轴精准滑入解锁槽内,从而提高将按钮卡接于壳体上的精准性。
16.可选的,所述滑轨上设有位于所述夹持气缸背对所述按压柱的抵接装置,所述抵接装置包括与所述夹持块相邻的抵接柱、设置所述滑轨上驱动所述抵接柱抵接至壳体上的抵接气缸。
17.通过采用上述技术方案,当推动装置将按钮朝壳体推动时,抵接气缸活塞杆伸长带动抵接柱朝壳体移动,直至抵接柱抵接于壳体远离按钮的一端,使得壳体固定于承载装置上,减少壳体在推动装置的推动下于承载装置上的滑移,从而加强按钮卡接至壳体时的稳定性。
18.可选的,所述机架背对所述承载装置的一侧设有输送按钮的上料装置一,所述上料装置一的一侧设有将所述上料装置一输送过来的按钮传送至所述机械手一的输送装置,所述输送装置包括设置于所述机架一侧于所述上料装置一相对齐的夹取座一、驱动所述夹取座一朝所述机械手一移动的输送气缸。
19.通过采用上述技术方案,当按钮自动上料时,按钮通过上料装置一输送至输送装置的夹取座一上,并通过输送气缸带动夹取座一朝承载装置的方向移动。直至夹取座一移动至机械手一,实现机械手一将夹取座一上的按钮进行夹取。因此通过设置上料装置一和夹取座一的配合,利用装配气缸的驱动,使得按钮自动输送至机械手一,以便机械手一进行夹取,实现按钮的自动上料,缩短人工上料的时间,从而提高按钮的上料效率。
20.可选的,所述输送装置背对所述上料装置一的一侧设有输送活动块的上料装置二,所述输送装置背对所述机械手一的一侧设有固定柱,所述固定柱上设有机械手二,所述机械手二用于将所述上料装置二上的活动块安装至所述夹取座一的按钮上,所述固定柱上设有驱动所述机械手二横向滑移的横向气缸、驱动所述机械手二升降的升降气缸,所述升降气缸上设有驱动所述机械手二带动活动块从按钮的装配槽滑入滑槽内的滑移气缸。
21.通过采用上述技术方案,当将活动块安装于按钮上时,上料装置二将活动块自动上料至靠近夹取座一的一端。横向气缸伸长,带动机械手二朝上料装置二移动,直至机械手二移动至活动块的上方,升降气缸活塞杆伸长,带动机械手二朝活动块移动,以将活动块进行夹取。夹取后机械手二在横向气缸活塞杆收缩的带动下朝夹取座一移动,直至机械手二上的活动块位于按钮的装配槽上方。升降气缸活塞杆伸长,将活动块放置于按钮的装配槽内。滑移气缸活塞杆收缩,带动机械手二朝固定柱的方向移动,使得活动块滑入按钮的滑槽内,实现活动块于按钮上的安装。因此通过设置机械手二,利用横向气缸、升降气缸、滑移气缸的驱动,使得机械手于三维方向进行移动,从而便于将活动块自动安装于按钮上。
22.可选的,所述承载装置包括设置于所述机架一侧的转盘、若干设置于转盘上用于固定壳体的载物台、设置于所述机架一侧驱动所述转盘转动的电机。
23.通过采用上述技术方案,当对多个壳体进行安装按钮时,通过驱动电机,带动转盘转动,使得转盘上各个载物台依次经过机械手一进行按钮的装配,实现多个壳体进行按钮的安装,从而加快按钮于壳体上的安装速度,配合上料装置一进行安全带锁扣的批量生产。
24.可选的,所述承载装置靠近所述上料装置二的一侧设有输送转动板的上料装置三,所述上料装置三上设有夹取转动板至所述载物台上壳体内的机械手三,所述电机驱动所述转盘从所述上料装置三到所述机械手一的方向转动。
25.通过采用上述技术方案,当将转动板安装于壳体上时,通过上料装置三将转动板朝机械手三输送,以便机械手三启动将转动板夹取至转盘上与机械手一相邻的壳体内,并使得转动板卡入安装槽内。从而便于推动装置将卡入壳体上的按钮朝载物台推动时,转动板受到按钮内部的挤压而卡入抵接槽内,从而实现转动板于按钮和活动之间的转动,以达到限制活动块于按钮上滑移行程的效果。
26.综上所述,本技术包括以下至少一种有益技术效果:
27.通过设置机械手,利用旋转气缸和按压装置的配合,使得栓机轴两端的端部卡入解锁槽内,实现解锁按键自动安装至壳体上,缩短解锁按键安装于壳体上的时间,从而提高解锁按键的组装效率;
28.通过设置推动板和按压柱的配合,利用推动气缸推动机械手一和按压装置朝承载装置移动、按压气缸按压按钮朝壳体移动,使得栓机轴两端的端部滑入解锁槽内,以使按钮卡入壳体,从而便于按钮于壳体上的安装;
29.通过设置上料装置一和夹取座一的配合,利用装配气缸的驱动,使得按钮自动输送至机械手一,以便机械手一进行夹取,实现按钮的自动上料,缩短人工上料的时间,从而提高按钮的上料效率;
30.通过设置机械手二,利用横向气缸、升降气缸、滑移气缸的驱动,使得机械手于三维方向进行移动,从而便于将活动块自动安装于按钮上;
31.通过设置机械手三,利用上料装置三对转动板的自动输送,使得转动板在机械手三的夹取下自动放置于载物台上壳体的安装槽内,从而便于将转动板自动安装于壳体上。
附图说明
32.图1是安全带锁扣的结构示意图。
33.图2是用于展示安全带锁扣结构的爆炸示意图。
34.图3是用于展示卡扣将安全带锁定的结构示意图。
35.图4是用于展示壳体上卡接孔的结构示意图。
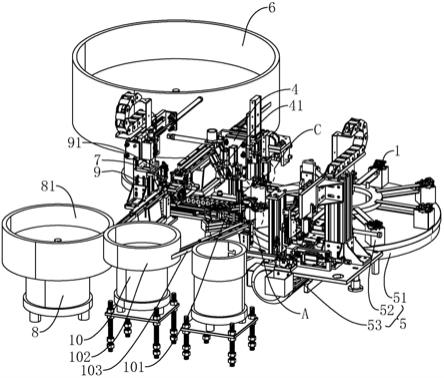
36.图5是本技术实施例的整体结构示意图。
37.图6是本技术实施例用于展示承载装置的结构示意图。
38.图7是图6中a部分的放大示意图。
39.图8是本技术实施例用于展示机构一的结构示意图。
40.图9是本技术实施例用于展示机构二的结构示意图。
41.图10是图9中b部分的放大示意图。
42.图11是图9中c部分的放大示意图。
43.图12是本技术实施例用于展示输送装置和驱动件的结构示意图。
44.图13是本技术实施例用于展示机构三的结构示意图。
45.附图标记说明:1、壳体;11、锁止弹簧;12、栓机轴;121、安装孔;13、滑道;14、卡接孔;15、导向槽;16、安装槽;17、开口;2、卡扣件;21、卡扣;211、卡接块;212、卡接槽;213、通孔;2131、凸块一;214、卡块;22、滑动块;23、舌板;231、凸块二;3、解锁按键;31、按钮;311、解锁槽;312、导向块;313、装配槽;314、滑槽;32、活动块;321、橡胶圈;33、转动板;331、转轴;332、抵接槽;333、连接槽;
46.4、机构一;41、基座;42、转动座;43、机械手一;44、驱动气缸一;45、上料装置一;451、振动盘一;452、上料轨道一;453、夹取座一;454、推入气缸;
47.5、机构二;51、上料装置二;511、振动盘二;512、上料轨道二;513、夹取座二;514、驱动气缸二;515、光纤传感器;516、导向板;52、上料装置三;521、振动盘三;522、上料轨道三;523、锁定气缸;524、锁定柱;53、输送装置;531、夹取座三;532、输送气缸;533、输送轨道;534、输送块;54、驱动件;541、固定柱;542、机械手二;543、横板;544、横移轨道;545、移动板;546、横向气缸;547、升降气缸;548、推拉板;549、滑移气缸;
48.6、机构三;61、机架;611、机械手三;612、立柱;613、滑轨;62、旋转装置;631、固定板;632、轮盘;633、旋转气缸;64、按压装置;641、按压气缸;642、按压柱;65、推动装置;651、
推动板;6511、滑块;652、推动气缸;66、定位装置;661、支撑板一;662、定位气缸;663、夹持气缸;666、夹持块;67、抵接装置;671、支撑板二;672、抵接气缸;673、抵接柱;
49.7、承载装置;71、转盘;72、载物台;73、电机;74、载物槽;75、载物柱;76、齿轮箱。
具体实施方式
50.以下结合附图1
‑
13对本技术作进一步详细说明。
51.参照图1,安全带锁扣包括壳体1、设置于壳体1内的卡扣件2、设置于卡扣件2上的锁止弹簧11、与锁止弹簧11连接的解锁按键3,解锁按键3通过栓机轴12与卡扣件2相连接。
52.参照图2,壳体1两侧开设有供栓机轴12贯穿的安装孔121,安装孔121呈“l”型。卡扣件2包括卡接于壳体1上的卡扣21、滑动安装于壳体1上的滑动块22、铰接于滑动块22上与栓机轴12相抵接的舌板23。
53.参照图2和图3,滑动块22位于卡扣21的下方,壳体1两侧位于安装孔121下方的侧壁上开设有供滑动块22滑移的滑道13。卡扣21上开设有供舌板23穿过的通孔213,舌板23穿过通孔213的下表面抵接于栓机轴12的上表面。
54.参照图2和图3,通孔213远离舌板23的孔壁上固定连接有凸块一2131,舌板23朝向滑动块22的侧壁上固定连接有凸块二231。锁止弹簧11的一端套装于凸块一2131上,另一端套装于凸块二231上,以便于锁止弹簧11作用于舌板23上使得舌板23绕着滑动块22转动。
55.参照图3,栓机轴12穿过安装孔121并抵接于卡扣21和舌板23之间的铰接处,舌板23背对凸块一2131的一侧与栓机轴12相抵接,将栓机轴12抵接于“l”型安装孔121的下方。
56.参照图2和图3,卡扣21远离舌板23的一端固定连接有两块卡接块211,两块卡接块211分别位于卡扣21长度方向的两侧,壳体1上开设有供卡接块211卡接的卡接槽212,卡接槽212贯穿壳体1的上端面,舌板23在锁止弹簧11的弹动下带动卡扣21转入或转出通孔213,以提供给卡扣21于壳体1上的转动空间。
57.参照图3和图4,壳体1靠近栓机轴12的一端开设有供安全带锁片插入的开口17,开口17连通于滑道13,安全带锁片插入开口17后与滑动块22相抵接。卡扣21远离凸块一2131的一端朝通孔213内延伸并形成有卡块214,壳体1背对栓机轴12的侧壁上开设有供卡块214插入的卡接孔14,以便于安全带锁片从开口17处插入后与滑动块22相抵接,使得滑动块22于滑道13内朝远离栓机轴12的方向滑移,并使得锁止弹簧11压缩,带动舌板23绕着滑动块22朝滑道13的方向转动,使得栓机轴12从“l”型安装孔121的上端滑移至下端,并将栓机轴12背对舌板23一侧的卡块214穿过安全带锁片插入卡接孔14内形成安全带的锁定。
58.参照图2,解锁按键3包括与壳体1相连的按钮31、滑动连接于按钮31上的活动块32、转动连接于壳体1上的转动板33。
59.参照图2,按钮31两侧的侧壁上开设有供栓机轴12凸出于安装孔121的两端滑移的解锁槽311,解锁槽311沿远离滑动块22的方向呈渐扩状,栓机轴12于解锁槽311内可沿水平或竖直方向滑移。按钮31靠近锁止弹簧11的一端固定连接有导向块312。导向块312朝壳体1内部延伸,壳体1的侧壁上开设有供导向块312滑移的导向槽15。将按钮31倾斜并朝壳体1移动,使得栓机轴12卡入解锁槽311内、导向块312位于导向槽15的上方,将导向块312朝壳体1按压,使得导向块312卡入导向槽15内,实现按钮31和壳体1的卡接。
60.参照图2,转动板33的两端凸出有转轴331,壳体1上开设有供转轴331转动的安装
槽16,将按钮31卡接于壳体1上后,转动板33位于按钮31和活动块32之间。按钮31朝向转动板33顶壁、活动块32朝向转动板33的底壁形成有抵接转动板33的抵接槽332。将按钮31朝壳体1内部推动时,转动板33宽度方向上的两端抵接于抵接槽332内,使得转轴331抵接于活动块32和按钮31之间,并于安装槽16内转动,以便于按下按钮31时,转动板33转动带动活动块32于按钮31上朝远离栓机轴12的方向滑动,直至活动块32抵接于按钮31的侧壁。从而带动活动块32于按钮31上滑移,实现活动块32对按钮31的行程限位。
61.参照图2,按钮31靠近锁止弹簧11的一端开设有供活动块32放入的装配槽313,按钮31远离滑道13的一端开设有供活动块32滑入的滑槽314,滑槽314沿按钮31的长度方向延伸,且滑槽314与装配槽313相连通。
62.参照图2,转动板33靠近活动块32的一端开设有连接槽333,活动块32上套设有橡胶圈321,橡胶圈321抵接于连接槽333内,以增大活动块32与转动板33之间的摩擦力,从而便于活动块32于按钮31上滑移时带动转动板33于按钮31和活动块32之间转动。
63.当未插上安全带锁片时,滑动块22在锁止弹簧11的抵接下位于滑道13内靠近按钮31的一端,且舌板23与滑动块22的铰接点位于栓机轴12下方,使得卡扣21朝上顶起,使得栓机轴12在舌板23的抵接下抵紧于“l”安装孔121的上端,使得栓机轴12处于“l”安装孔121的上端。当插上安全带时,安全带从按钮31远离壳体1的一端插入,并从按钮31和壳体1之间的开口17插入,滑动块22受到安全带锁片的抵接于滑道13内朝远离按钮31的方向滑移,舌板23绕着滑动块22转动将锁止弹簧11压缩,舌板23与滑动块22的铰接点朝远离按钮31的方向移动,舌板23远离滑动块22的一端朝滑道13的方向转动,使得栓机轴12在舌板23的抵接下从“l”安装孔121的上端滑移至下端,并使得卡块214转动至卡接孔14内与位于开口17内的安全带锁片相卡接。
64.当将安全带解锁时,按下按钮31,使得按钮31于壳体1上朝卡扣21滑移、导向块312于导向槽15朝锁止弹簧11的方向滑移。活动块32在按钮31的按动下通过橡胶圈321带动转动板33抵接于抵接槽332在安装槽16内转动,使得活动块32于按钮31上朝远离锁止弹簧11的方向滑移。以将解锁槽311的槽壁抵接于栓机轴12,使得栓机轴12从“l”安装孔121的下端滑移至上端,使得舌板23在栓机轴12的滑动下带动锁止弹簧11压缩,进而使得卡扣21朝安装孔121的上端转动,直至卡扣21脱离于卡接孔14,从而解除对安全带的锁定。
65.本技术实施例公开一种解锁按键组装设备。
66.参照图2和图5,一种解锁按键组装设备包括输送壳体1的承载装置7、沿承载装置7转动方向依次放置的机构一4、机构二5、机构三6,机构一4用于将转动板33安装于壳体1上,经过承载装置7的转动输送后传送至机构二5,机构二5用于将活动块32安装于按钮31上,机构三6用于将装好活动块32的按钮31安装至装好转动板33的壳体1。
67.参照图5和图6,承载装置7包括转盘71、若干固定连接于转盘71上的用于固定壳体1的载物台72、驱动转盘71转动的电机73,载物台72于转盘71上沿转盘71的周向方向均匀设置,电机73驱动转盘71转动使得载物台72上的壳体1依次经过机构一4、机构二5、机构三6。
68.参照图6和图7,载物台72上开设有供壳体1卡入的载物槽74,以将壳体1放入载物槽74后限制壳体1于载物台72上的滑移。转盘71底壁固定连接有载物柱75,载物柱75远离转盘71的一端固定连接有和电机73同轴连接的齿轮箱76,齿轮箱76的输入轴和电机73输出轴同轴连接,齿轮箱76的输出轴同轴连接于转盘71转轴331。
69.参照图2和图6,输送电机73通过齿轮箱76带动转盘71的转轴331转动,实现电机73带动转盘71转动,以便载物台72上的壳体1依次安装上转动板33、活动块32、按钮31。
70.参照,2和图7,将壳体1放入载物台72的载物槽74内进行转动板33、活动块32、按钮31安装时,壳体1内已经安装有栓机轴12、锁止弹簧11、舌板23、滑动块22及卡扣21,卡扣21上的卡接块211已经抵接于卡接槽212内,锁止弹簧11抵接于舌板23和卡扣21上。
71.参照图7和图8,机构一4包括基座41、转动连接于基座41上的转动座42、滑动连接于转动座42上的机械手一43、固定连接于转动座42上驱动机械手一43朝转盘71滑移的推入气缸454、放置于机械手一43一侧的上料装置一45,推入气缸454的活塞杆固定连接于所述机械手一43,机械手一43用于将上料装置一45中的转动板33安装至壳体1上。
72.参照图8,上料装置一45包括放置于转盘71一侧的振动盘一451、连通于振动盘一451内的上料轨道一452、连通于上料轨道一452远离振动盘一451一端的夹取座一453,基座41上竖直固定连接有驱动气缸一44,驱动气缸一44活塞杆竖直朝上和夹取座一453固定连接,驱动气缸一44驱动夹取座一453朝机械手一43移动。
73.参照图2和图8,振动盘一451将若干个转动板33以振动的方式从上料轨道一452振动至夹取座一453内,再启动驱动气缸一44将夹取座一453向上推动至机械手一43的高度,机械手一43为气动夹爪。机械手一43朝夹取座一453转动后,带动转动座42转动。推入气缸454推动机械手一43朝夹取座一453移动,将夹取座一453上的转动板33夹取。机械手一43夹取转动板33后推入气缸454活塞杆收缩,机械手一43夹取转动板33后转动至载物台72上方并和壳体1的安装槽16对齐,推入气缸454带动机械手一43朝安装槽16内滑移,以将转动板33两端推入安装槽16内,实现机械手一43将夹取座一453上的转动板33夹取至壳体1上。
74.参照图5和图9,机构二5包括上料装置二51、机械手二542、上料装置三52、输送装置53、驱动件54,机械手二542位于上料装置二51和上料装置三52之间,输送装置53位于机械手二542朝向载物台72的一侧,上料装置二51将活动块32朝驱动件54输送,上料装置三52将按钮31朝驱动件54输送,驱动件54驱动机械手二542将活动块32夹持后安装于按钮31上。
75.参照图5和图9,上料装置二51将活动块32朝机械手二542输送,上料装置三52将按钮31朝输送装置53输送,机械手二542将活动块32安装至按钮31上后夹取至输送装置53上,通过输送装置53将装好活动块32的按钮31输送至机构三6。
76.参照图9和图10,上料装置二51包括振动盘二511、连通于振动盘二511内的上料轨道二512、连通于上料轨道二512远离振动盘二511一端的夹取座二513。
77.参照图9和图10,夹取座二513的底部安装有驱动夹取座二513向上升起的驱动气缸二514,振动盘二511将若干个活动块32以振动的方式从上料轨道二512振动至夹取座二513内,再启动驱动气缸二514将夹取座二513朝上方推动,使得夹取座二513上升,夹取座二513上升后夹取座二513的侧壁将上料轨道二512进行封堵,以限制上料轨道二512内的活动块32输送至夹取座二513。以便于驱动件54驱动机械手二542移动至夹取座二513的正上方时停止移动,以对机械手二542的滑移进行定位。机械手二542再向夹取座二513移动,以将夹取座二513上的活动块32夹取至输送装置53的按钮31上。
78.参照10,夹取座二513的两侧固定连接有检测活动块32上是否有橡胶圈321的光纤传感器515,两个光纤传感器515正对橡胶圈321。夹取座二513一侧的光纤传感器515发射信号,另一侧光纤传感器515接收信号。当橡胶圈321位于活动块32上时,光纤传感器515的信
号受到阻断,夹取座二513一侧的光纤传感器515接收不到信号,活动块32上则检测有橡胶圈321。当橡胶圈321没有位于活动块32上时,夹取座二513一侧的光纤传感器515接收到信号,活动块32上则检测没有橡胶圈321。
79.参照图9和图10,夹取座二513背对输送装置53的一侧固定连接有导向板516,导向板516用于集中输送没有橡胶圈321的活动块32。光纤传感器515用于检测夹取座二513上活动块32是否有橡胶圈321,驱动件54驱动机械手二542将套有橡胶圈321的活动块32夹取至按钮31上。光纤传感器515检测不到活动块32上有橡胶圈321,机械手二542夹取没有橡胶圈321的活动块32朝导向板516丢入,以将没有套好橡胶圈321的活动块32筛选出来。
80.参照图9,上料装置三52包括振动盘三521、连通于振动盘三521内的上料轨道三522,且输送装置53连通于上料轨道三522,振动盘三521振动将按钮31从上料轨道三522输送至输送装置53上。
81.参照图9和图11,上料轨道三522靠近输送装置53的底部安装有锁定气缸523,锁定气缸523的活塞杆固定连接有锁定柱524,锁定柱524贯穿上料轨道三522的底壁并延伸至按钮31内,以使机械手二542将活动块32安装至按钮31上时,按钮31从上料轨道三522上输送至输送装置53。锁定柱524伸长至上料轨道三522靠近输送装置53一端的按钮31内,将上料轨道三522内进行输送的按钮31锁定。以便机械手二542将上料装置二51上的活动块32安装至输送装置53的按钮31上,输送装置53将安装好活动块32的按钮31输送至机构三6后再次滑移回上料轨道三522处。锁定气缸523活塞杆带动锁定柱524收缩,解除对上料轨道三522内按钮31的锁定,使得按钮31自动上料至输送装置53内。
82.参照图5和图12,输送装置53背对承载装置7的一侧安装有固定柱541,机械手二542滑动安装于固定柱541上。固定柱541朝向机构三6的一侧固定连接有输送轨道533,输送轨道533朝机构三6延伸。
83.参照图5和图12,输送装置53包括在输送轨道533朝机构三6滑移的夹取座三531、固定连接于输送轨道533上驱动夹取座三531朝机构三6移动的输送气缸532。
84.参照图11和图12,输送气缸532为无杆气缸,上料轨道三522远离振动盘三521的一端与夹取座三531相平齐,夹取座三531位于输送轨道533靠近固定柱541一端时和上料轨道三522相连通,以便于上料轨道三522上的按钮31输送至夹取座三531上。同时夹取座三531为机械手二542朝上料装置三52滑移的定点位置,以便于机械手二542夹取活动块32后将活动块32安装至夹取座三531的按钮31上。
85.参照图5和图12,夹取座三531的底部固定连接有滑移于输送轨道533上的输送块534。输送气缸532推动夹取座三531带动输送块534朝机构三6滑移,以将装配好活动块32的按钮31输送至机构三6。机构三6将装好活动块32的按钮31夹取后,输送气缸532推动夹取座三531朝固定柱541滑移。
86.参照图12,驱动件54包括带动机械手二542于上料装置二51和上料装置三52之间来回滑移的横向气缸546、带动机械手二542竖直方向滑移的升降气缸547、带动机械手二542将活动块32卡入按钮31内的滑移气缸549。
87.参照图12,固定柱541远离夹取座三531的一端固定连接有横板543,横板543朝向输送轨道533的一侧并排固定连接有两根横移轨道544,横移轨道544上滑移有移动板545,横向气缸546的活塞杆固定连接于移动板545的侧壁上,横向气缸546驱动移动板545于横移
轨道544上沿水平方向来回滑移。
88.参照图12,升降气缸547竖直固定连接于移动板545朝向输送轨道533的一侧,升降气缸547的活塞杆上水平固定连接有推拉板548。滑移气缸549固定连接于推拉板548背对升降气缸547的一侧,机械手二542竖直固定于滑移气缸549的活塞杆上。
89.参照图9和图12,当机械手二542将活动块32安装于按钮31上时,升降气缸547推动推拉板548带动机械手二542朝输送轨道533移动,直至机械手二542移动至夹取座三531内将活动块32夹取后,横向气缸546驱动移动板545滑移至横移轨道544靠近上料轨道三522的一端,以带动机械手二542从上料轨道二512移动至夹取座三531的正上方。
90.参照图2和图12,升降气缸547再推动推拉板548带动机械手二542朝夹取座三531移动,使得机械手二542上的活动块32随机械手二542下降而放入按钮31上的装配槽313内,滑移气缸549活塞杆收缩带动机械手二542朝远离输送轨道533的方向滑移,使得活动块32滑入按钮31的滑槽314内,从而实现将活动块32自动安装于按钮31上。
91.参照图5和图13,承载装置7的一侧放置有支撑机构三6的机架61,机架61位于承载装置7和上料装置三52之间,机构三6包括装配于机架61上将按钮31夹取后安装至壳体1上的机械手三611、安装于机架61上带动机械手三611旋转的旋转装置62、安装于机架61上带动机械手三611朝承载装置7移动的推动装置65、安装于机架61上与旋转装置62相邻的按压装置64,按压装置64用于按压按钮31卡接至壳体1上。
92.参照图13,机架61上竖直固定连接有立柱612,立柱612远离机架61的一端横向固定连接有滑轨613,滑轨613沿垂直于固定柱541的方向延伸,滑轨613上滑移连接有固定板631。
93.参照图11和图13,旋转装置62包括转动连接于立柱612上的轮盘632、驱动轮盘632转动的旋转气缸633,旋转气缸633固定连接于固定板631二背对轮盘632的侧壁上,且旋转气缸633位于滑轨613的下方。机械手三611将装好活动块32的按钮31从夹取座三531上夹取后,旋转气缸633带动轮盘632逆时针转动,使得按钮31呈倾斜向上的状态,进而使得导向块312向上翘起。
94.参照图13,机械手三611固定连接于轮盘632背对固定板631二的一侧,按压装置64位于轮盘632上机械手三611背对夹取座一453的一侧,推动装置65位于滑轨613上。
95.参照图7和图13,推动装置65包括滑移于滑轨613上的推动板651、固定连接于滑轨613上驱动推动板651带动机械手三611朝载物台72滑移的推动气缸652。推动板651沿滑轨613的长度方向滑移,推动板651上固定连接有滑移于滑轨613上的滑块6511,固定板631固定连接于推动板651背对滑轨613的一侧,推动气缸652位于滑轨613远离载物台72的一端。
96.参照图2和图13,推动气缸652推动推动板651带动固定板631二、机械手三611、按压装置64朝载物台72滑移。以将倾斜在机械手三611上的按钮31滑入至壳体1上,此时活动块32位于按钮31上远离导向块312的一端,直至转动板33宽度方向上的两端滑移至抵接槽332内,且转动板33上的连接槽333朝向橡胶圈321。以使栓机轴12两端的端部位于解锁槽311的正下方,实现装有活动块32的按钮31和壳体1卡接前的位置对准。
97.参照图13,按压装置64包括竖直固定连接于轮盘632侧壁上的按压气缸641、固定连接于按压气缸641活塞杆上的按压柱642,按压柱642位于倾斜状态按钮31翘起一端的正上方。
98.参照图2和图13,当推动气缸652推动机械手三611将倾斜的按钮31滑入壳体1上时,使得按钮31以倾斜的状态滑入壳体1,按压气缸641及按压柱642随机械手三611一同朝载物台72滑移。按压柱642位于翘起的导向块312的正上方,按压气缸641启动,驱动按压柱642朝按钮31翘起的一端向下压,使得导向块312卡入导向槽15内、栓机轴12两端的端部滑入解锁槽311内并形成卡接,实现按钮31靠近导向块312一端和壳体1的自动卡接。
99.参照图7和图13,滑轨613上靠近载物台72的一端固定连接有支撑板一661,支撑板一661与滑轨613相垂直,支撑板一661远离滑轨613的一端位于载物台72的正上方。支撑板一661上固定连接有将栓机轴12于安装孔121内进行扶正的定位装置66。
100.参照图13,定位装置66包括竖直固定连接于支撑板一661上的定位气缸662、竖直固定连接于定位气缸662活塞杆上的夹持气缸663、连接于夹持气缸663远离定位气缸662一端的两个夹持块666,夹持气缸663和两个夹持块666组成了气动夹爪。
101.参照图7和图13,两个夹持块666通过夹持气缸663的驱动而呈夹持或张开的状态,两个夹持块666分别位于夹持气缸663的两侧处于张开状态,随着定位气缸662驱动夹持气缸663下滑,使得两块夹持块666分别位于栓机轴12的两端,夹持气缸663再驱动两块夹持块666朝栓机轴12移动,以使夹持块666抵接于栓机轴12的两端使得栓机轴12于安装孔121内滑移并形成扶正。
102.参照图13,滑轨613上位于支撑板一661背对推动气缸652的一端固定连接有支撑板二671,支撑板二671与滑轨613相垂直,支撑板二671远离滑轨613的一端位于壳体1远离按压柱642一端的正上方。支撑板二671上固定连接有将壳体1抵紧于载物台72上的抵接装置67。
103.参照图7和图13,抵接装置67包括竖直固定连接于支撑板二671远离滑轨613一端的抵接气缸672、固定连接于抵接气缸672活塞杆上的抵接柱673。当推动气缸652将倾斜的按钮31推入壳体1上时,抵接气缸672活塞杆伸长,带动抵接柱673朝壳体1移动,直至抵接柱673抵接于壳体1远离按钮31的一端,使得壳体1抵紧于载物台72上,减少壳体1在推动装置65的推动下于载物台72上朝远离机械手三611方向滑移。
104.本技术实施例一种解锁按键组装设备的实施原理为:当将解锁按键3安装于壳体1上时,需要先将转动板33通过上料装置一45和机械手一43的配合,将转动板33自动上料至载物台72上的壳体1内。上料装置二51将套有橡胶圈321的活动块32自动上料至夹取座二513上,上料装置三52将按钮31自动上料至夹取座三531上,通过机械手二542在横向气缸546、升降气缸547、滑移气缸549的驱动下,使得机械手二542夹取活动块32后进行空间移动,以便机械手二542将夹取的活动块32安装于按钮31。
105.再通过输送气缸532将夹取座三531上安装好活动块32的按钮31输送至机械手三611进行夹取。通过旋转气缸633使得夹取按钮31的机械手三611旋转后,按钮31上的解锁槽311对准壳体1上栓机轴12两端的端部。并通过推动气缸652的推动、按压柱642的按压、定位块的定位、抵接柱673固定,使得栓机轴12凸出安装孔121两端的端部滑入并卡接至解锁槽311内,实现解锁按键3于壳体1上的安装。壳体1放置于转盘71的各个载物台72上,利用电机73带动转盘71上的载物台72转动,以使各个载物台72上的壳体1依次安装转动板33后再安装装有活动块32的按钮31,从而实现批量的壳体1自动安装解锁按键3,缩短解锁按键3安装于壳体1上的时间,从而提高解锁按键3的组装效率。
106.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1