一种自动装针机的制作方法
1.本实用新型涉及压力指示器生产领域,具体涉及一种自动装针机。
背景技术:
2.压力指示器用于监控气管插管和喉罩应用时囊体所需要的密封压力大小,以弥补传统依靠人工手感来判断压力大小导致的不准确性,压力指示器以其在临床上的应用价值,受到医务工作者和医疗器械行业的极大关注。
3.而压力指示器组装过程中其指针的安装精度直接影响压力指示器的指示精度,现有的压力指示器组装时为保证指针的精度,通常采用人工校准安装,不仅生产效率低,劳动强度大,而且安装精度无法保证,不能满足批量化生产的需要。
技术实现要素:
4.本实用新型的目的是针对现有技术的不足,提供一种自动装针机,可以实现压力指示器的装针自动化,且安装精度高。
5.为实现上述目的,本实用新型提出一种自动装针机,包括机体,机体上设置有用于抓取并安装指针的指针安装机构及用于固定指针和压力指示器的固定机构;所述固定机构包括可前、后移动的底板,底板上安装有用于固定压力指示器的固定平台一和用于固定指针的固定平台二,底板上还包括与压力指示器连通的充压机构,以保证压力指示器内的压力与指针的倾斜角度相契合。
6.作为本实用新型的进一步设置,所述充压机构包括与充压设备连接的进气管,进气管与压力指示器之间通过伸缩组件连通,所述伸缩组件包括连接管,所述连接管一端与三通连接,另一端套接有滑动管,所述滑动管可以在连接管的一端往复滑动,滑动管上套接有弹簧,滑动管另一端插接有中空的出气管,出气管靠近压力指示器的一端端口为圆台形,出气管的轴心设有通气孔,所述滑动管位于固定平台一内部的导向腔内,导向腔与固定平台上用于固定压力指示器的定位槽连通。
7.通过上述设置,可以实现充压机构与压力指示器的自动连接,无需人工操作,自动化程度高。
8.作为本实用新型的进一步设置,所述进气管与压力指示器之间还连接有三通,三通的另一个出气端口与连接下一个压力指示器的三通进气端口连接,位于最后的三通的两个出气端口分别连接两个压力指示器。
9.通过上述设置,可以对多个压力指示器同时充压和装针,提高安装效率。
10.作为本实用新型的进一步设置,所述指针安装机构包括可上下、左右移动的抓取杆,抓取杆上设置有连通真空泵的吸附孔。
11.通过上述设置,采用真空吸附的方式抓取指针,相对于机械爪抓取,可以减少指针变形和损坏。
12.作为本实用新型的进一步设置,所述抓取杆的底部设置有与指针形状契合的抓取
槽。
13.通过上述设置,可以避免指针在移动过程中受外力作用产生角度偏移。
14.作为本实用新型的进一步设置,所述固定平台二上安装有固定基座,所述固定基座顶部设有供指针插入的定位孔,固定基座顶部边缘设有限位凸起,限位凸起上设置有限制指针角度的限位槽。
15.通过上述设置,相较于将指针置于凹槽内进行固定,指针凸出于固定基座,更方便抓取。
16.作为本实用新型的进一步设置,底板上还固定有沾胶块,所述沾胶块上设置有盛放胶水的储胶槽。
17.通过上述设置,指针与压力指示器的连接更为牢固。
18.作为本实用新型的进一步设置,固定平台一、固定平台二、沾胶块与底板之间均采用插嵌连接。
19.通过上述设置,方便固定平台一、固定平台二、粘胶块取下进行维护和清洁,同时实现自动定位的功能。
20.通过上述技术方案得到的一种自动装针机,其有益效果是:通过指针安装机构抓取指针并将指针按压到固定在固定机构的压力指示器上,实现了指针安装的自动化,提高了安装效率,同时将压力指示器与充压机构连通,保证了指针安装的精度。
附图说明
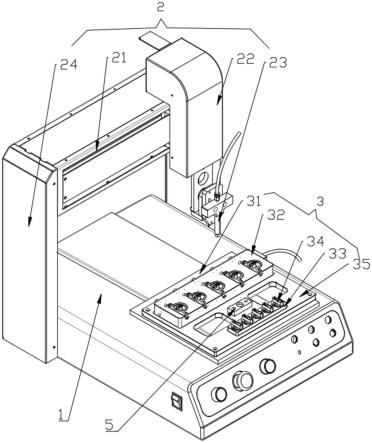
21.图1是本实用新型所述自动装针机的结构示意图。
22.图2是本实用新型所述固定机构的结构示意图。
23.图3是本实用新型所述充压机构的结构示意图。
24.图4是本实用新型所述安装平台一的水平剖视图。
25.图5是本实用新型所述固定基座的结构示意图。
26.图6是本实用新型所述抓取杆的结构示意图。
27.图中,机体1;指针安装机构2;驱动组件一21;驱动组件二22;抓取杆23;抓取槽23a;支撑架24;固定机构3;驱动组件三31;固定平台一32;定位槽32a;导向腔32b;固定平台二33;固定基座34;定位孔34a;限位凸起34b;限位槽34c;底板35;充压机构4;进气管41;充压组件42;连接管42a;弹簧42b;三通42c;出气管42d;滑动管42e;限位环42f;固定块43;沾胶块5;储胶槽51;压力指示器6;指针7。
具体实施方式
28.下面结合附图对本实用新型作进一步的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的其他所有实施例,都属于本实用新型保护的范围。
29.参考附图,本实施例提供了一种自动装针机,包括机体1,机体1上设置有用于抓取并安装指针7的指针安装机构2及用于固定指针7和压力指示器6的固定机构3,所述指针安装机构2分别通过驱动组件一21、驱动组件二22实现左右和上下移动,驱动组件一21通过支撑架24固定在机体1上方,所述固定机构3通过驱动组件三31实现在机体1上的前后移动。
30.所述固定机构3包括可在驱动组件三31作用下前、后移动的底板35,底板35上嵌有用于固定压力指示器6的固定平台一32和用于固定指针7的固定平台二33,固定平台一32位于固定平台二33的后侧,所述固定平台一32上设置有至少一个的与压力指示器6外壳契合的定位槽32a,固定平台二33上嵌有至少一个的圆形固定基座34,所述固定基座34顶部设有供指针7插入的定位孔34a,固定基座34顶部边缘设有限位凸起34b,限位凸起34b上设置有限制指针7角度的限位槽34c。
31.上述设置使指针7固定时凸出于固定基座34,便于指针安装机构2抓取。
32.为了保证压力指示器6和指针7之间的距离固定,所述固定平台一32和固定平台二33相互平行,定位槽32a和定位孔34a分别沿固定平台一32和固定平台二33的长度方向呈直线阵列分布。
33.为了保证指针7的偏移角度与实际压力示数一致,所述底板35上还安装有用于给压力指示器6充压的充压机构4,所述充压机构4与压力指示器6连通。
34.所述驱动组件三31安装在机架上设置的安装槽内,包括驱动电机,所述驱动电机通过驱动轮、从动轮实现与同步带的传动连接,所述底板35通过固定在同步带上的滑板实现前、后方向的移动,为保证底板35移动方向,在同步带的一侧还设置有与其传送方向一致的滑轨。
35.为了避免驱动组件三31受到外界环境影响,安装槽的上方固定有挡板,所述滑板通过u形滑块固定在同步带上。
36.类似的,所述驱动组件一21、驱动组件二22与驱动组件三31驱动方式相同,所述驱动组件二22固定在驱动组件一21的滑板上随驱动组件一21移动。
37.当然,上述驱动组件也可以采用其他方式,如气缸、滚珠丝杠结构等,在这里不作为本实施例的限制条件,只需能够实现固定机构3和指针安装机构2的移动即可。
38.所述指针安装机构2包括通过螺栓固定在驱动组件二的滑板上的竖直向下的抓取杆23,抓取杆23上设置有连通真空泵的吸附孔,所述抓取杆23的底部设置有与指针7形状契合的抓取槽23a,抓取槽23a的设置可以避免指针7在移动过程中发生位置偏移。
39.为提高指针7安装的牢固性,底板35上位于固定平台一32和固定平台二33之间嵌有沾胶块5,所述沾胶块5上设置有盛放胶水的储胶槽51;指针安装机构2吸取指针7后在储胶槽51内沾附一定的胶水然后再安装在压力指示器6上。
40.底板35上位于置物块的两侧还设置有插槽,滑板上对应设置有插块,安装时只需将插块插入底板35,然后再用沉头螺钉固定底板35四周可以保证底板35的位置精确。
41.底板35与滑板、底板35与固定平台一32、固定平台二33均采用插嵌的方式连接,是为了方便后期维修和清理。
42.所述充压机构4包括与充压设备连接的进气管41,为实现多组气压指示器的同时充气,进气管41与压力指示器6之间通过三通42c连接,即三通42c的一个出气端口与压力指示器6连接,三通42c的另一个出气端口与下一个压力指示器6的三通42c进气端口连接,当然,位于最后的三通42c的两个出气端口分别连接两个压力指示器6。
43.在这里需要注意的是,若只有一组压力指示器6,则直接将进气管41与压力指示器6连通,无需使用三通42c。
44.具体的,为方便连接,三通42c与压力指示器6之间通过伸缩组件连通,所述伸缩组
件包括u形连接管42a,所述连接管42a一端与三通42c连接,另一端套接有滑动管42e,所述滑动管42e可以在连接管42a的一端往复滑动,滑动管42e上套接有弹簧42b,滑动管42e另一端插接有中空的出气管42d,出气管42d靠近压力指示器6的一端端口为圆台形,出气管42d的轴心设有通气孔;所述滑动管42e位于固定平台内部的导向腔32b内,导向腔32b与定位槽32a连通,滑动管42e靠近压力指示器6进气口的一端外周固定有限位环42f。
45.上述充压机构4通过l形固定块43固定在底板35上,以避免发生位移。
46.压力指示器6与充压机构4连接时,压力指示器6在向定位槽32a放置过程中与连接管42a的端口抵接,推动滑动管42e向远离压力指示器6的方向滑动,弹簧42b逐渐压缩,压力指示器6置于定位槽32a中后,在弹簧42b的反向作用下,滑动管42e向压力指示器6方向移动,连接管42a与压力指示器6的进气口抵接并向压力指示器6内传输气体,此时限位环42f与定位槽32a侧壁抵接。
47.需要注意的是,向压力指示器6内输入的气压应该与指针7安装到压力指示器6上时指出的读数相同,以保证指针7安装的精确度。
48.本实施例中,驱动组件一21、驱动组件二22、驱动组件三31及充压设备的启闭、真空泵的启闭均通过plc控制器实现,机架的左侧壁上设置有控制plc控制器的开关,机架的前侧壁上设置有显示所述自动装针机运行状态的提示灯,绿灯表示运行正常,红灯表示出现故障。
49.安装指针7时,底板35在驱动组件三31作用下带动固定平台二33向抓取杆23方向移动,驱动组件一21和驱动组件二22分别带动抓取杆23左右、上下移动以吸取固定平台二上的指针7,底板35带动沾胶块移动到抓取杆23正下方,指针在储胶槽51内沾取一定的胶水后,底板35带动固定平台一32移动到抓取杆23正下方,抓取杆23向压力指示器6方向移动,向下按压指针7,将指针7安装到压力指示器6的旋转轴上,此时指针7指出的示数与压力指示器6内的通过气体的气压一致。
50.上述技术方案仅体现了本实用新型技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本实用新型的原理,属于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1