一种新型的焊接机器人用激光焊缝跟踪器的制作方法
1.本实用新型属于激光焊缝跟踪技术领域,具体涉及一种新型的焊接机器人用激光焊缝跟踪器。
背景技术:
2.焊接机器人,是从事焊接的工业机器人,激光焊接机器人是焊接机器人中使用频率最高的一种,激光焊接相比传统的焊接方式,速度快、深度大、变形小,所以深受欢迎。但是激光焊接的焊接位置需要非常精确,务必在激光束的聚焦范围内,因此激光焊接机器人在定位上一般都配备有激光焊缝跟踪器,以确保焊缝位置的精确性。
3.然而,现有的激光焊缝跟踪器在实际操作时,有时会经过长时间的使用,导致装置本身的温度过高,不但影响使用的安全性,还会降低装置的使用寿命。
技术实现要素:
4.本实用新型的目的就在于为了解决上述问题而提供一种新型的焊接机器人用激光焊缝跟踪器,方便在实际操作时能够持续对装置本身进行散热降温,避免装置温度过高,从而保证安全性能和使用寿命。
5.本实用新型通过以下技术方案来实现上述目的:
6.一种新型的焊接机器人用激光焊缝跟踪器,包括安置板,所述安置板内卡合有跟踪器主体,所述跟踪器主体上设有散热机构,所述散热机构包括散热箱,所述跟踪器主体上固定有散热箱,所述散热箱上设有循环机构,所述循环机构包括安置块,所述散热箱上固定有安置块,所述安置块连接有循环箱,所述循环箱和散热箱都卡合于安置板,所述安置块内设有循环泵,所述循环泵连通于循环箱和散热箱。
7.优选的,所述安置板上固定有添加机构,所述添加机构包括储箱,所述安置板上固定有储箱,所述储箱内滑动有压杆,所述储箱内卡合有封板,所述安置板内设有通管。
8.优选的,所述安置板内设有调节机构,所述调节机构包括转杆,所述安置板内转动有转杆,所述转杆连接有第一齿轮,所述第一齿轮啮合有第二齿轮。
9.优选的,所述第二齿轮上固定有第一螺杆,所述转杆通过第一齿轮和第二齿轮驱动跟踪器主体沿着第一螺杆滑动。
10.优选的,所述安置板卡合于安装机构,所述安装机构包括安装块,所述安置板卡合于安装块内。
11.优选的,所述安装块上设有旋钮,所述旋钮连接有第二螺杆,所述第二螺杆转动于安装块内,所述旋钮驱动安置板沿着第二螺杆滑动。
12.优选的,所述散热箱上固定有封块,所述封块上转动有把手,所述把手连接有搅拌杆,所述搅拌杆转动于散热箱内。
13.优选的,所述储箱上固定有安置框,所述安置框内设有压杆。
14.优选的,所述压杆上缠绕有第一弹簧,所述第一弹簧固定于安置框。
15.优选的,所述封板连接有第二弹簧,所述第二弹簧固定于储箱。
16.本实用新型的有益效果是:
17.本实用新型所述的新型的焊接机器人用激光焊缝跟踪器,焊接过程中,散热箱中事先存储的冷却液就会对跟踪器主体起到吸热降温的作用,进一步的,将循环泵接通电源,则循环泵就会不断的将循环箱内的冷却液同散热箱内的冷却液进行循环交换,提高散热效率,从而方便在实际操作时能够持续对跟踪器主体进行散热降温,避免跟踪器主体温度过高,使得得以保证装置的安全性能和使用寿命。
附图说明
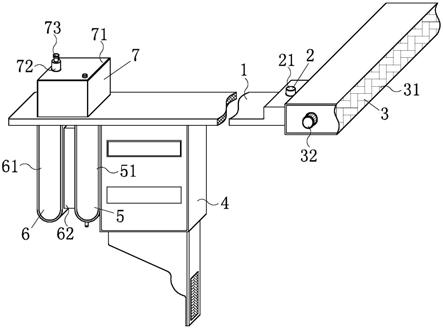
18.图1为本实用新型的整体结构示意图;
19.图2为图1所示的安置板、调节机构、跟踪器主体、散热机构和添加机构的连接结构示意图;
20.图3为图1所示的安置板和安装机构的连接结构示意图;
21.图4为图2所示的a部结构放大示意图;
22.图5为图2所示的b部结构放大示意图;
23.图6为图2所示的c部结构放大示意图。
24.图中所示:1、安置板,2、调节机构,21、转杆,22、第一齿轮,23、第二齿轮,24、第一螺杆,3、安装机构,31、安装块,32、旋钮,33、第二螺杆,4、跟踪器主体,5、散热机构,51、散热箱,52、搅拌杆,53、把手,54、封块,6、循环机构,61、循环箱,62、安置块,63、循环泵,7、添加机构,71、储箱,72、安置框,73、压杆,74、第一弹簧,75、封板,76、第二弹簧,77、通管。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.请参阅图1-6所示,本实用新型实施例提供一种新型的焊接机器人用激光焊缝跟踪器,包括安置板1,所述安置板1内卡合有跟踪器主体4,所述跟踪器主体4上设有散热机构5,所述散热机构5包括散热箱51,所述跟踪器主体4上固定有散热箱51,所述散热箱51上设有循环机构6,所述循环机构6包括安置块62,所述散热箱51上固定有安置块62,所述安置块62连接有循环箱61,所述循环箱61和散热箱51都卡合于安置板1,所述安置块62内设有循环泵63,所述循环泵63连通于循环箱61和散热箱51。
27.请参阅图1-6所示,安置板1上固定有添加机构7,所述添加机构7包括储箱71,所述安置板1上固定有储箱71,所述储箱71内滑动有压杆73,所述储箱71内卡合有封板75,所述安置板1内设有通管77。通过添加机构7便于添加冷却液,
28.在本实施例中,安置板1内设有调节机构2,调节机构2包括转杆21,所述安置板1内转动有转杆21,所述转杆21连接有第一齿轮22,所述第一齿轮22啮合有第二齿轮23,这样,可以改变所述转杆21的传动方向。第二齿轮23上固定有第一螺杆24,所述转杆21通过第一齿轮22和第二齿轮23驱动跟踪器主体4沿着第一螺杆24滑动,这样可以方便跟踪器主体4的
移动。
29.请参阅图1-6所示,安置板1卡合于安装机构3,安装机构3包括安装块31,所述安置板1卡合于安装块31内。安装块31上设有旋钮32,所述旋钮32连接有第二螺杆33,所述第二螺杆33转动于安装块31内,所述旋钮32驱动安置板1沿着第二螺杆33滑动。第二螺杆33可以很方便的调节安置板1。散热箱51上固定有封块54,所述封块54上转动有把手53,所述把手53连接有搅拌杆52,所述搅拌杆52转动于散热箱51内。储箱71上固定有安置框72,安置框72内设有压杆73。第一弹簧74固定于安置框72。封板75连接有第二弹簧76,所述第二弹簧76固定于储箱71。通过第一弹簧74为了方便压杆73的复位,通过第二弹簧76方便封板75的复位。
30.本实用新型在使用时,使用者可先将安装块31固定安置于焊接机器人上所需的合适部位,完成本装置使用前的准备工作;实际操作时,使用者可先手动对旋钮32进行转动,旋钮32转动带动第二螺杆33转动,第二螺杆33转动令安置板1不断的在安装块31内部移动,进而方便对跟踪器主体4的位置进行调节,进一步的,使用者还可对转杆21进行转动,转杆21转动带动第一齿轮22转动,第一齿轮22转动带动第二齿23转动,第二齿轮23转动带动第一螺杆24转动,第一螺杆24转动令跟踪器主体4在安置板1不断的移动,更加方便对跟踪器主体4的调节。焊接过程中,散热箱51中事先存储的冷却液就会对跟踪器主体4起到吸热降温的作用,进一步的,将循环泵63接通电源,则循环泵63就会不断的将循环箱61内的冷却液同散热箱51内的冷却液进行循环交换,提高散热效率,此外,在需要时,使用者可通过第一螺杆24将散热箱51调节至合适部位,排出循环箱61内的废液,再对压杆73进行按压,令压杆73对封板75端部进行挤压抵触,则封板75产生位移,第一弹簧74和第二弹簧76同时被压缩,直至令封板75上的通孔对准通管77,继而令储箱71内新鲜的冷却液补充进循环箱61中,从而方便在实际操作时能够持续对跟踪器主体4进行散热降温,避免跟踪器主体4温度过高,使得得以保证装置的安全性能和使用寿命;此外,使用者还可握住把手53并转动,带动搅拌杆52转动,进一步提高吸热效果。
31.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
32.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1