缓冲磁吸锁附机构及装置的制作方法
1.本实用新型涉及一种锁附机构,尤其涉及一种缓冲磁吸锁附机构及装置。
背景技术:
2.市面上许多产品在组装过程中,都会通过锁附机构传递动力组件所产生的动力,以锁固产品的各零组件或是外壳,达到自动化生产的效果。
3.然而,在锁附的过程中,锁附机构与动力组件之间或锁附机构与产品之间常产生碰撞。使得锁附机构、产品以及动力组件发生损毁的机率提升。
4.因此,需要提供一种缓冲磁吸锁附机构及装置来解决上述问题。
技术实现要素:
5.鉴于上述,在一些实施例中,一种缓冲磁吸锁附机构包括导向件、连接件、第一缓冲组件、批杆、滑动磁座以及第二缓冲组件。导向件具有第一端、导引通道以及第二端。连接件具有前段、中段以及末段,连接件的前段及中段位于导引通道,前段靠近于第一端,中段靠近于第二端。第一缓冲组件位于导引通道并用以缓冲前段及第二端。批杆连接末段。滑动磁座具有磁吸前端并滑设于末段。第二缓冲组件用以缓冲中段与滑动磁座。
6.在一些实施例中,提供一种缓冲磁吸锁附装置包括载具、缓冲磁吸锁附机构以及动力组件。载具包括夹持部。缓冲磁吸锁附机构包括导向件、连接件、第一缓冲组件、批杆、滑动磁座以及第二缓冲组件。导向件具有第一端、导引通道以及第二端,夹持部夹持导向件。连接件具有前段、中段以及末段,连接件的前段及中段位于导引通道,前段靠近于第一端,中段靠近于第二端。第一缓冲组件位于导引通道并用以缓冲前段及第二端。批杆连接末段。滑动磁座具有磁吸前端并滑设于末段。第二缓冲组件用以缓冲中段与滑动磁座。动力组件用以选择地与连接件动力对接。
7.藉此,依据一些实施例,在锁附的过程中,缓冲磁吸锁附机构通过第一缓冲组件缓冲连接件的前段及导向件的第二端,进而缓冲动力组件与连接件之间的碰撞。其次,通过第二缓冲组件缓冲连接件的中段与滑动磁座,进而缓冲滑动磁座与产品之间的碰撞。
附图说明
8.图1绘制,依据一些实施例,缓冲磁吸锁附装置的作动示意图。
9.图2绘制,依据一些实施例,缓冲磁吸锁附机构的外观示意图。
10.图3绘制,依据一些实施例,缓冲磁吸锁附机构的分解示意图。
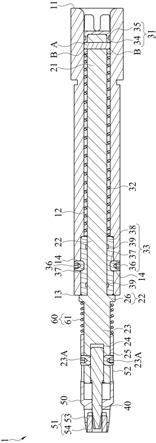
11.图4绘制,依据一些实施例,缓冲磁吸锁附机构的剖视示意图。
12.图5绘制,依据一些实施例,缓冲磁吸锁附机构的吸附作动示意图,缓冲磁吸锁附机构处于下压状态。
13.图6绘制,依据一些实施例,缓冲磁吸锁附机构的吸附作动示意图,批杆与锁固件完成对接状态。
14.图7绘制,依据一些实施例,缓冲磁吸锁附机构的吸附作动示意图,缓冲磁吸锁附机构处于上移状态。
15.图8绘制,依据一些实施例,缓冲磁吸锁附机构的锁固作动示意图,对接件处于下压状态。
16.图9绘制,依据一些实施例,缓冲磁吸锁附机构的锁固作动示意图,对接件与连接件完成动力对接状态。
17.图10绘制,依据一些实施例,缓冲磁吸锁附机构的锁固作动示意图,批杆与锁固件完成对接状态。
18.图11绘制,依据一些实施例,缓冲磁吸锁附机构的锁固作动示意图,缓冲磁吸锁附机构上移,对接件与连接件解除动力对接状态。
19.主要组件符号说明:
20.100
ꢀꢀꢀꢀꢀꢀꢀꢀ
缓冲磁吸锁附装置
ꢀꢀꢀꢀꢀꢀ
38
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
内表面
[0021]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
缓冲磁吸锁附机构
ꢀꢀꢀꢀꢀꢀ
39
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
内油槽
[0022]
10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导向件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
批杆
[0023]
11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一端
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
50
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
滑动磁座
[0024]
12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导引通道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
51
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
磁吸前端
[0025]
13
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二端
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
52
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
滑槽
[0026]
14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
通孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
53
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
容纳部
[0027]
20
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
连接件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
54
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
磁吸环
[0028]
21
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
前段
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
60
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二缓冲组件
[0029]
22
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
中段
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
61
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二弹性件
[0030]
23
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
末段
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
70
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
载具
[0031]
23a
ꢀꢀꢀꢀꢀꢀꢀꢀ
滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
71
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
夹持部
[0032]
24
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
容置槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
80
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
动力组件
[0033]
25
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
贯孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
81
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
动力源
[0034]
26
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
定位部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
82
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
旋锁机械手臂
[0035]
30
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一缓冲组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
83
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输送机械手臂
[0036]
31
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
对接块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
84
ꢀꢀꢀꢀꢀꢀꢀꢀ
对接件
[0037]
32
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一弹性件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀaꢀꢀꢀꢀꢀꢀꢀꢀꢀ
销钉
[0038]
33
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导向套
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀbꢀꢀꢀꢀꢀꢀꢀꢀꢀ
穿孔
[0039]
34
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
外表面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀcꢀꢀꢀꢀꢀꢀꢀꢀꢀ
锁固件
[0040]
35
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
外油槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀdꢀꢀꢀꢀꢀꢀꢀꢀꢀ
取料平台
[0041]
36
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
顶丝
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀeꢀꢀꢀꢀꢀꢀꢀꢀꢀ
作业平台
[0042]
37
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
环槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀfꢀꢀꢀꢀꢀꢀꢀꢀꢀ
产品分件
具体实施方式
[0043]
图1绘制,依据一些实施例,缓冲磁吸锁附装置100的作动示意图。如图1所示,缓冲磁吸锁附装置100包括载具70与缓冲磁吸锁附机构1。缓冲磁吸锁附装置100可自动吸附锁固件c,并将锁固件c锁至产品分件f,完成产品的锁固,达到自动化生产的效果。上述产品分
件f可为电路板、待锁附的壳体、散热片等,锁固件c可为螺丝、螺栓或螺钉。
[0044]
如图1所示,缓冲磁吸锁附装置100的载具70包括夹持部71,载具70用以承载缓冲磁吸锁附机构1。载具70的夹持部71可具有至少一孔部,在一些实施例中夹持部71的孔部为八个,但不以此限制本实用新型,端看使用需求。
[0045]
如图1所示,在一些实施例中,缓冲磁吸锁附装置100包括载具70、缓冲磁吸锁附机构1、以及动力组件80。缓冲磁吸锁附机构1位于载具70,动力组件80用以选择地与该缓冲磁吸锁附机构1动力对接。在一些实施例中,动力组件80包括动力源81、旋锁机械手臂82以及输送机械手臂83。动力源81可为马达、内燃机或气压缸,动力源81连接于旋锁机械手臂82及输送机械手臂83,并传送动力至旋锁机械手臂82及输送机械手臂83。旋锁机械手臂82选择性地与缓冲磁吸锁附机构1动力对接,并可传递扭力或轴向力至缓冲磁吸锁附机构1。输送机械手臂83连接于载具70,并可带动载具70移动。
[0046]
图2绘制,依据一些实施例,缓冲磁吸锁附机构1的外观示意图。图3绘制,依据一些实施例,缓冲磁吸锁附机构1的分解示意图。图4绘制,依据一些实施例,缓冲磁吸锁附机构1的剖视示意图。如图1至图4所示,在一些实施例中,缓冲磁吸锁附机构1包括导向件10、连接件20、第一缓冲组件30、批杆40、滑动磁座50以及第二缓冲组件60。缓冲磁吸锁附机构1可吸附锁固件c,并可用于传递动力组件80的动力至锁固件c,以锁固产品,达到自动化生产的效果。
[0047]
如图2至图4所示,缓冲磁吸锁附机构1的导向件10具有第一端11、导引通道12以及第二端13。第一端11与第二端13分别位于导向件10的两端,导引通道12位于第一端11与第二端13之间。导向件10可为环形壁围绕而成的空心轴体,导向件10的轴向为第一端11与第二端13的连线方向。导向件10的材质可为金属,可通过抽型或铸造制成,导向件10的材质也可为塑胶,可通过注塑成型制成。
[0048]
如图1所示,在一些实施例中,导向件10受缓冲磁吸锁附装置100的夹持部71夹持。
[0049]
如图3至图4所示,连接件20具有前段21、中段22以及末段23,连接件20的前段21与末段23分别邻近于连接件20的两端,中段22位于前段21与末段23之间。连接件20可为圆柱轴体,连接件20的轴向为前段21与末段23的连线方向。连接件20的材质可为金属,可通过抽型或铸造制成,连接件20的材质也可为塑胶,可通过注塑成型制成。
[0050]
承上,如图3至图4所示,连接件20穿设于导向件10,连接件20的前段21及中段22位于导向件10的导引通道12之中,且前段21靠近于第一端11,中段22靠近于第二端13。连接件20与导向件10可实质为共轴,且连接件20的外径可小于导向件10的内径,因此连接件20可在导引通道12内相对于导向件10做轴向运动,也可在导引通道12内相对于导向件10沿着轴向做旋转运动。连接件20的中段22可限制导向件10相对于连接件20的轴向运动范围,使导向件10的第二端13限制活动于连接件20的前段21与中段22。在一些实施例中,连接件20的中段22包括定位部26,定位部26的外径大于导向件10的内径。
[0051]
如图1、图3与图4所示,连接件20的前段21可与动力组件80进行动力对接,举例来说,旋锁机械手臂82连接有对接件84,连接件20的前段21可与对接件84进行动力对接,通过对接件84传递轴向力或扭力,使连接件20产生动能(容后详述)。
[0052]
如图3至图4所示,第一缓冲组件30位于导向件10的导引通道12,并且可用以缓冲连接件20的前段21相对于导向件10的第二端13的轴向运动。在一些实施例中,第一缓冲组
件30包含对接块31、第一弹性件32以及导向套33。在一些实施例中,导向件10包覆第一缓冲组件30,因此导向件10能够保护第一缓冲组件30,以避免第一缓冲组件30受到外界的影响。在此外界是指导向件10以外的空间。举例来说,导向件10可以使第一缓冲组件30不与外界的水接触,以避免第一缓冲组件30产生锈蚀。或是当有外力撞击时,导向件10可保护第一缓冲组件30,以避免第一缓冲组件30直接承受外力撞击而受损。
[0053]
承上,如图1、图3以及图4所示,第一缓冲组件30的对接块31可用于与动力组件80进行动力对接。具体而言,对接块31可通过几何形状的配合以与动力组件80进行动力对接。举例来说,对接块31可具有x型凹槽或直线型凹槽,旋锁机械手臂82的对接件84可具有相应的直线型凸块,凸块可容设于凹槽内。或者,对接块31也可具有凸块,对接件84也可具有凹槽。
[0054]
如图3至图4所示,对接块31位于导引通道12并连接连接件20的前段21。上述连接关系是一种连接件20运动时,对接块31被连动的连接关系。举例来说,连接件20进行轴向运动和/或旋转运动时,对接块31被连动作相同的轴向运动和/或旋转运动。此连接关系例如枢设或固定。在一些实施例中,第一缓冲组件30包括一销钉a,对接块31与连接件20的前段21具有实质为共轴的穿孔b,销钉a穿设于穿孔b,使对接块31可枢设于连接件20的前段21。通过销钉a穿设于穿孔b,使对接块31可组装也可拆卸于连接件20。在一些实施例中,对接块31也可通过锁固、黏合或熔接的方式固定于连接件20的前段21。
[0055]
如图3至图4所示,第一缓冲组件30的导向套33可用于导引连接件20的轴向运动,导向套33位于导引通道12,并且对应于连接件20的中段22,导向套33连接导向件10的第二端13。在一些实施例中,第一缓冲组件30包括至少一顶丝36(在此顶丝36数量为两个,但不以此为限),导向套33的外表面34具有一环槽37,导向件10贯穿有一通孔14,(在此通孔14数量为两个,但不以此为限),通孔14对应于顶丝36且邻近于第二端13。顶丝36穿设于导向件10的通孔14并紧迫于导向套33的环槽37,使导向套33固定于导向件10,并使导向套33连接于导向件10的第二端13。
[0056]
如图3至图4所示,第一缓冲组件30的第一弹性件32可为弹簧,弹簧可为线圈弹簧、悬臂弹簧、锥形弹簧。弹簧可吸收变形能以达到缓冲的效果,举例来说,弹簧可连接于两个以上的对象,当各对象具有趋近于彼此的动能,弹簧会受压并将动能转换为变形能,以减缓各对象趋近于彼此的动能。
[0057]
承上,如图3至图4所示,在一些实施例中,第一弹性件32位于对接块31及导向套33之间,用以缓冲对接块31相对于导向套33的轴向运动。连接件20与第一弹性件32的配置可为连接件20穿设于第一弹性件32。或者,连接件20与第一弹性件32彼此并排。
[0058]
如图1、图3以及图4所示,批杆40用于与锁固件c进行对接,并传递扭力至锁固件c上。上述对接关系可通过几何形状的配合使批杆40与锁固件c进行动力对接。举例来说,批杆40的一端可具有几何结构,锁固件c具有相应的几何结构。几何结构可为x型凸块,相应的几何结构可为相应的x型凹槽。或者,几何结构可为星型凸块,相应的几何结构可为相应的星型凹槽。不以此限制本实用新型。
[0059]
如图1、图3以及图4所示,批杆40连接于连接件20的末段23。上述连接关系是一种连接件20运动时,批杆40被连动的连接关系。举例来说,连接件20进行轴向运动和/或旋转运动时,批杆40被连动作相同的轴向运动和/或旋转运动。此连接关系例如枢设或固定。
[0060]
如图3至图4所示,滑动磁座50可为一磁铁(例如钕磁铁)或一铁磁件(例如铁、镍或钴等金属件),磁铁与铁磁件可通过冲压、铸造或压铸等方式制成。滑动磁座50滑设于连接件20的末段23。滑动磁座50可为环形轴体,环绕连接件20,并与导向件10实质为共轴,可相对于导向件10作轴向运动。滑动磁座50具有磁吸前端51,磁吸前端51位于滑动磁座50远离连接件20的一端,磁吸前端51可磁性吸附锁固件c。磁吸前端51可为锥型轴体,滑动磁座50的最小内径位于磁吸前端51。
[0061]
承上,如图3至图4所示,磁吸前端51可包含容纳部53及磁吸环54,磁吸环54位于容纳部53,磁吸环54为一磁铁(例如钕磁铁),批杆40相对于末段23的另一端位于磁吸环54。在一些实施例中,磁吸环54与滑动磁座50为不同分件,磁吸环54通过磁性吸附可组装且可拆卸于容纳部53。在一些实施例中,磁吸环54与滑动磁座50为一体制成。
[0062]
如图3至图4所示,第二缓冲组件60用以缓冲连接件20的中段22与滑动磁座50。在一些实施例中,第二缓冲组件60包含第二弹性件61,第二弹性件61为弹簧。第二弹性件61的两端分别接触中段22的定位部26及滑动磁座50相对于磁吸前端51的另一端。上述接触可为有施加预力的压配固定,也可为通过锁固、黏合或熔接的固定。
[0063]
以下就缓冲磁吸锁附机构1的吸附作动作说明。如图1所示,在一些实施例中,取料平台d上具有多个锁固件c,缓冲磁吸锁附装置100的载具70承载有至少一个缓冲磁吸锁附机构1(在此数量以八个为例,但不以此为限)。首先,载具70通过输送机械手臂83的移动,使各缓冲磁吸锁附机构1对应至各锁固件c。
[0064]
图5绘制,依据一些实施例,缓冲磁吸锁附机构1的吸附作动示意图,缓冲磁吸锁附机构1处于下压状态。接着,如图1与图5所示,输送机械手臂83(请一并参考图1)带动载具70(请一并参考图1)使各缓冲磁吸锁附机构1朝各锁固件c移动(在此即朝箭头指示方向移动),滑动磁座50的磁吸前端51会先与锁固件c接触,并磁性吸附锁固件c。
[0065]
图6绘制,依据一些实施例,缓冲磁吸锁附机构1的吸附作动示意图,批杆40与锁固件c完成对接状态。如图1、图3与图6所示,承上,各缓冲磁吸锁附机构1的导向件10持续朝各锁固件c移动,取料平台d通过锁固件c传递至滑动磁座50的反作用力逐渐增加,滑动磁座50会开始朝连接件20的中段22做轴向运动,并且连接于连接件20的批杆40会朝锁固件c移动,直至与锁固件c完成对接。第二缓冲组件60在上述过程中会缓和连接件20的中段22与滑动磁座50之间的轴向运动。
[0066]
图7绘制,依据一些实施例,缓冲磁吸锁附机构1的吸附作动示意图,缓冲磁吸锁附机构1处于上移状态。接着,如图1、图6与图7所示,输送机械手臂83带动载具70使各缓冲磁吸锁附机构1远离取料平台d而上移,因而卸除掉取料平台d给予滑动磁座50的反作用力,使滑动磁座50远离批杆40,并回复至原位。同时,滑动磁座50的磁吸前端51持续吸附锁固件c,批杆40与锁固件c保持间隙并解除对接。
[0067]
以下就缓冲磁吸锁附机构1的锁固作动作说明。图8绘制,依据一些实施例,缓冲磁吸锁附机构1的锁固作动示意图,对接件84处于下压状态。图1与图8所示,在一些实施例中,完成上述吸附动作后,载具70通过输送机械手臂83的移动,移动至作业平台e,使吸附有锁固件c的缓冲磁吸锁附机构1对应至作业平台e上的产品分件f。
[0068]
图9绘制,依据一些实施例,缓冲磁吸锁附机构1的锁固作动示意图,对接件84与连接件20完成动力对接状态。接着,如图1、图3、图8以及图9所示,对接件84通过旋锁机械手臂
82朝缓冲磁吸锁附机构1移动,并与连接件20的前段21进行动力对接,在对接的过程中旋锁机械手臂82会给予对接件84些微扭力,使对接件84能与连接件20的前段21顺利对接。
[0069]
图10绘制,依据一些实施例,缓冲磁吸锁附机构1的锁固作动示意图,批杆40与锁固件c完成对接状态。接着,如图1、图3、图9以及图10所示,对接件84传递轴向力至连接件20,使连接件20朝向作业平台e移动(如图1所示),并相对于导向件10做轴向运动,连接于末段23的批杆40以及滑设于末段23的滑动磁座50跟着连接件20连动。连接件20持续朝向作业平台e移动,滑动磁座50的磁吸前端51会先通过锁固件c传递轴向力至作业平台e上,同时作业平台e会将反作用力通过锁固件c传递至滑动磁座50,使滑动磁座50朝连接件20的中段22做轴向运动,并且连接于连接件20的批杆40会朝锁固件c移动,直至批杆40与锁固件c完成对接。第一缓冲组件30在上述过程中会缓和连接件20的前段21以及导向件10的第二端13间的轴向运动,第二缓冲组件60在上述过程中会缓和连接件20的中段22与滑动磁座50之间的轴向运动。
[0070]
如图10所示,批杆40与锁固件c完成对接后,缓冲磁吸锁附机构1会传递扭力至锁固件c,使缓冲磁吸锁附机构1完成对产品分件f的锁固。
[0071]
图11绘制,依据一些实施例,缓冲磁吸锁附机构1的锁固作动示意图,缓冲磁吸锁附机构1上移,对接件84与连接件20(如图1与图3所示)解除动力对接状态。如图1与图11所示,当缓冲磁吸锁附机构1完成对产品分件f的锁固后,对接件84远离缓冲磁吸锁附机构1,解除与缓冲磁吸锁附机构1的动力对接,同时载具70带动缓冲磁吸锁附机构1远离作业平台e而上移,因此卸除掉作业平台e给予滑动磁座50的反作用力,使滑动磁座50远离批杆40,并回复至原位。
[0072]
藉此,依据一些实施例,在锁附的过程中,缓冲磁吸锁附机构1通过第一缓冲组件30缓冲连接件20的前段21及导向件10的第二端13,进而缓冲动力组件80与连接件20之间的碰撞。其次,通过第二缓冲组件60缓冲连接件20的中段22与滑动磁座50,进而缓冲滑动磁座50与产品之间的碰撞。
[0073]
如图3与图4所示,在一些实施例中,对接块31的外表面34接触于导引通道12,且外表面34具有外油槽35。因此,当连接于连接件20的对接块31相对于导向件10做轴向运动,可通过对接块31的外油槽35将润滑油均匀导引至导引通道12,减少连接件20与导向件10间的摩擦力,有助于连接件20与导向件10间的轴向运动。
[0074]
如图3与图4所示,在一些实施例中,导向套33的内表面38接触于中段22,且内表面38具有内油槽39。因此,当连接件20相对于导向套33做轴向运动,可通过导向套33的内油槽39将润滑油均匀导引至连接件20的中段22,减少连接件20与导向套33间的摩擦力,有助于连接件20与导向套33间的轴向运动。
[0075]
如图3与图4所示,在一些实施例中,连接件20的末段23具有至少一滑块23a(在此滑块数量为两个,但不以此为限)。滑动磁座50具有至少一滑槽52(在此滑块数量与滑槽数量对应,但不以此为限),各滑槽52以滑动磁座50的轴心对称地设置于滑动磁座50的外缘,并且贯穿滑动磁座50。滑块23a位于滑槽52,因此,滑块23a可在滑槽52内移动,进而定位滑动磁座50相对于连接件20的轴向运动,在一实施例中,此滑块23a为顶丝。
[0076]
如图3与图4所示,在一些实施例中,连接件20包括一容置槽24以及两个对称的贯孔25,容置槽24位于末段23,由末段23的端面沿着连接件20的轴向贯穿,各贯孔25贯穿末段
23的外缘并与容置槽24相连通。批杆40相对于具有几何结构的一端容设于容置槽24,滑块23a穿经滑槽52及贯孔25紧迫批杆40,使批杆40固定于连接件20的末段23。因此,滑块23a可用于方便组装或拆卸连接件20、批杆40以及滑动磁座50。
[0077]
藉此,缓冲磁吸锁附机构通过第一缓冲组件与第二缓冲组件来缓冲连接件的前段及导向件的第二端、动力组件与连接件之间的碰撞以及通过缓冲连接件的中段与滑动磁座,进而缓冲滑动磁座与产品之间的碰撞。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1