标刻补偿函数的获取方法、激光标刻方法、系统和存储器与流程
1.本发明涉及激光校准领域,尤其涉及一种标刻补偿函数的获取方法、激光标刻方法、系统和存储器。
背景技术:
2.激光具有定向发光、准直性高等优点,被广泛应用与工业及医疗行业当中。目前,激光标刻设备大量使用振镜进行扫描加工。但振镜的使用也带来了扫描区域中打标图像的失真及定位不准的情况。传统的人工测量、校准的方法不仅工序繁琐而且难以满足精度要求。
技术实现要素:
3.为了解决上述现有技术中激光校准工序繁琐、精度难以控制的缺陷,本发明提出了一种标刻补偿函数的获取方法、激光标刻方法、系统和存储器。
4.本发明的目的之一提出了一种标刻补偿函数的获取方法,可简单、高效、精确地获取激光标刻补偿函数。
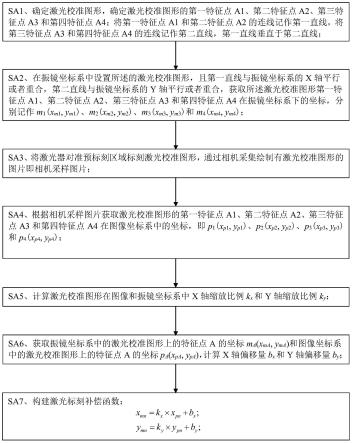
5.一种标刻补偿函数的获取方法,包括以下步骤:
6.sa1、确定激光校准图形,确定激光校准图形的第一特征点a1、第二特征点a2、第三特征点a3和第四特征点a4;将第一特征点a1和第二特征点a2的连线记作第一直线,将第三特征点a3和第四特征点a4的连线记作第二直线,第一直线垂直于第二直线;
7.sa2、在振镜坐标系中设置所述的激光校准图形,且第一直线与振镜坐标系的x轴平行或者重合,第二直线与振镜坐标系的y轴平行或者重合,获取所述激光校准图形第一特征点a1、第二特征点a2、第三特征点a3和第四特征点a4在振镜坐标系下的坐标,分别记作m1(x
m1
,y
m1
)、m2(x
m2
,y
m2
)、m3(x
m3
,y
m3
)和m4(x
m4
,y
m4
);mi(x
mi
,y
mi
)中的mi表示第i个特征点ai在振镜坐标系中的标记符号,x
mi
表示第i个特征点ai在振镜坐标系中的横坐标,y
mi
表示,第i个特征点ai在振镜坐标系中的纵坐标,i=1、2、3、4;
8.sa3、将激光器对准预标刻区域标刻激光校准图形,通过相机采集绘制有激光校准图形的图片即相机采样图片;
9.sa4、根据相机采样图片获取激光校准图形的第一特征点a1、第二特征点a2、第三特征点a3和第四特征点a4在图像坐标系中的坐标,即p1(x
p1
,y
p1
)、p2(x
p2
,y
p2
)、p3(x
p3
,y
p3
)和p4(x
p4
,y
p4
);
10.sa5、计算激光校准图形在图像坐标系和振镜坐标系中的x轴缩放比例k
x
和y轴缩放比例ky:
11.k
x
=d(m1,m2)/d(p1,p2);
12.ky=d(m3,m4)/d(p3,p4);
13.其中,d(m1,m2)、d(p1,p2)、d(m3,m4)、d(p3,p4)表示距离;
[0014][0015]
sa6、获取振镜坐标系中的激光校准图形上的特征点a的坐标ma(x
ma
,y
ma
)和图像坐标系中的激光校准图形上的特征点a的坐标pa(x
pa
,y
pa
),计算x轴偏移量b
x
和y轴偏移量by;
[0016]bx
=x
ma-k
x
×
x
pa
;
[0017]by
=y
ma-ky×ypa
;
[0018]
sa7、构建激光标刻补偿函数:
[0019]
x
mn
=k
x
×
x
pn
+b
x
;
[0020]ymn
=ky×ypn
+by;
[0021]
将相机采集的待标刻图形记作p,将待标刻图形p变换到振镜振镜坐标系下的预期图形记作p’;(x
pn
,y
pn
)表示待标刻图形p上的第n个像素点在图像坐标系中的坐标,(x
mn
,y
mn
)表示预期图形p’上与待标刻图形p上的第n个像素点对应的的像素点在振镜坐标系中的坐标。
[0022]
优选的,sa2中振镜坐标系中的激光校准图形的中心点mc(x
mc
,y
mc
)与振镜坐标系的中心点重合;激光校准图形的中心点为第一直线和第二直线的交点或者激光校准图形外接圆的圆心。
[0023]
优选的,所述特征点a为激光校准图形的中心点、第一特征点a1、第二特征点a2、第三特征点a3或者第四特征点a4,所述激光校准图形的中心点为第一直线和第二直线的交点或者激光校准图形外接圆的圆心。
[0024]
优选的,所述第一特征点a1和第二特征点a2中的至少一个位于激光校准图形的外接圆上,所述第三特征点a3和第四特征点a4中的至少一个位于激光校准图形的外接圆上。
[0025]
优选的,所述激光校准图形采用十字图形或者正三角形、矩形。
[0026]
本发明的目的之二提出了一种激光标刻方法,可实现高效、精确的激光标刻。
[0027]
一种激光标刻方法,包括以下步骤:
[0028]
sb1、相机采集待标刻图形,获取待标刻图形中各像素点在图像坐标系中的坐标值,将待标刻图形中第k个像素点在图像坐标系中的坐标值记作(x
pk
,y
pk
),1≤k≤k,k表示待标刻图形中的像素点总数量;
[0029]
sb2、结合激光标刻补偿函数获取待标刻图形中各像素点在振镜坐标系中的坐标值,将待标刻图形中第k个像素点在振镜坐标系中的坐标值记作(x
mk
,y
mk
),x
mk
=k
x
×
x
pk
+b
x
,y
mk
=ky×ypk
+by;激光标刻补偿函数的获得如上所述;
[0030]
sb3、结合坐标点集合在振镜坐标系中构建标刻模板,并结合标刻模板在标刻对象上蚀刻待标刻图形。
[0031]
本发明的目的之三提出了一种激光标刻系统,用于承载上述的激光标刻方法。
[0032]
一种激光标刻系统,包括存储模块和处理器;存储模块中存储有激光标刻补偿函数和计算机程序,处理器与存储模块连接,处理器在执行计算机程序时实现所述的激光标刻方法。
[0033]
本发明的目的之四提出了另一种激光标刻系统,用于承载上述的标刻补偿函数的
获取方法和激光标刻方法。
[0034]
一种激光标刻系统,包括第一存储模块、第二存储模块和处理器;第一存储模块中存储有第一计算机程序,第二存储模块中存储有第二计算机程序;处理器分别连接第一存储模块和第二存储模块;处理器在执行第一计算机程序时实现所述的标刻补偿函数的获取方法;处理器在执行第二计算机程序时实现所述的激光标刻方法。
[0035]
本发明的目的之五提出了一种存储器,用于承载上述的激光标刻方法。
[0036]
一种存储器,存储有激光标刻补偿函数和计算机程序,所述计算机程序被执行时用于实现所述的激光标刻方法。
[0037]
本发明的目的之六提出了另一种存储器,用于承载上述的标刻补偿函数的获取方法。
[0038]
一种存储器,存储有计算机程序,所述计算机程序被执行时用于实现如所述的标刻补偿函数的获取方法。
[0039]
本发明的优点在于:
[0040]
(1)本发明提供的标刻补偿函数的获取方法中,基于坐标缩放平移原理构建待标刻图形在图像坐标系和振镜坐标系之间的坐标变换关系。本发明中通过设置简单的激光标准图形,然后根据确定的激光校准图形上的特征点在图像坐标系和振镜坐标系中的坐标对应关系,便可确定激光标刻补偿函数。相对于现有的人工测量方法,本发明操作简单、效率高,且精确可靠。
[0041]
(2)本发明中,激光校准图形的中心点mc(x
mc
,y
mc
)与振镜坐标系的中心点重合,有利于激光校准图形的绘制,便于图形标刻和数据计算,提高激光标刻补偿函数的计算精度。
[0042]
(3)本发明中,特征点a可从已知的特征点a1-a4中选择,也可选择中心点或者其他特征点,操作灵活。
[0043]
(4)本发明中,a1和a2中的至少一个位于激光校准图形的外接圆上,a3和a4中的至少一个位于激光校准图形的外接圆上,从而有效地保证了对激光校准图形的边界取点,有利于保证特征点和坐标点的精确对应,实现了以特征点为桥梁实现振镜坐标系和图像坐标系中坐标点对应关系的精确分析,从而保证数值的精确计算和标刻的精确性。
[0044]
(5)本发明中,激光校准图形可选择规律、简洁、易于确定特征点的图形,以进一步降低计算难度,提高计算效率。
[0045]
(6)本发明还提出了一种激光标刻方法,结合获取的激光标刻补偿函数,实现了图像坐标中的待标刻图形到振镜坐标系的转换,保证了根据振镜坐标系中预期图形标刻出的标刻图像与待标刻图形的一致。本发明中,在待标刻图形从图像坐标系变换到振镜坐标系的过程中进行坐标补偿,如此可直接根据振镜坐标系中的预期图形进行激光标刻,使得激光标刻动作更加专一简洁,不易出错。
[0046]
(7)本发明还提出了一种激光标刻系统,用于承载和实现上述的激光标刻方法。值得注意的是,本实施例中,可激光标刻补偿函数,可预先获取并存储在激光标刻系统中,也可根据需要实时校准系统以获取激光标刻补偿函数。
[0047]
(8)本发明提供的存储器,为上述的标刻补偿函数的获取方法和激光标刻方法提供了载体,有利于本发明的推广应用。
附图说明
[0048]
图1为本发明提出的一种标刻补偿函数的获取方法流程图;
[0049]
图2为实施例1所用激光校准图形示意图;
[0050]
图3为振镜坐标系下图2所示激光校准图形;
[0051]
图4为相机采样图片中的激光校准图形在图像坐标系下的示意图;
[0052]
图5为相机拍摄的待标刻图形p;
[0053]
图6为振镜坐标系中与图5所示待标刻图形对应的期望图形p’;
[0054]
图7为图像坐标系中的待标刻图形p与振镜坐标系中的期望图形p’的对比展示图;
[0055]
图8为本发明提出的一种激光标刻方法流程图。
具体实施方式
[0056]
实施例1
[0057]
共光路振镜式激光标刻系统的二维坐标映射分为振镜坐标系和图像坐标系。本实施例中,设置振镜坐标系范围为xm∈[0,65535],ym∈[0,65535],相机拍摄的视觉场图像坐标系即图像坐标系的范围为x
p
∈[0,1024],y
p
∈[0,1024],振镜坐标系和图像坐标系均以左上角为坐标原点。
[0058]
本实施例中,对激光标刻进行坐标补偿时,首先获得激光标刻补偿函数,,激光标刻补偿函数的获得包括以下步骤。
[0059]
第一步:设置激光校准图形,本实施例中,激光校准图形采用如图2所示的十字图形,其左端点作为第一特征点a1,其右端点作为第二特征点a2,其上端点作为第三特征点a3,其下端点作为第四特征点a4。
[0060]
第二步:在振镜坐标系中设置所述的激光校准图形即“十”字图形。本实施例中,将十字图形的中心点a与振镜坐标系的中心点mc重合,如此,十字图形上各特征点a1、a2、a3、a4和中心点在振镜坐标系下的坐标,分别记作:
[0061]
a1对应m1(30268,32768)
[0062]
a2对应m2(35268,32768)
[0063]
a3对应m3(32768,30268)
[0064]
a4对应m4(32768,35268)
[0065]
a对应mc(32768,32768)
[0066]
第三步:将激光器对准预标刻区域标刻所述十字图形,通过相机拍摄标刻后的十字图形,获得相机采样图片。
[0067]
第四步:结合图像坐标系对相机采样图片进行分析,获取图像坐标系中对应十字图形第一特征点a1的像素点坐标p1(x
p1
,y
p1
),对应第二特征点a2的像素点坐标p2(x
p2
,y
p2
)、对应第三特征点a3的像素点坐标p3(x
p3
,y
p3
)和对应第四特征点a4的像素点坐标p4(x
p4
,y
p4
)。
[0068]
第五步:计算x轴缩放比例k
x
和y轴缩放比例ky:
[0069]
[0070][0071]
其中,d(m1,m2)表示振镜坐标系中坐标点m1和m2之间的距离,d(m3,m4)表示振镜坐标系中坐标点m3和m4之间的距离;d(p1,p2)表示图像坐标系中坐标点p1和p2之间的距离,d(p3,p4)表示图像坐标系中坐标点p3和p4之间的距离。
[0072]
第六步:计算x轴偏移量b
x
和y轴偏移量by。本实施例中,根据振镜坐标系中的坐标点mc(32768,32768)和图像坐标系中的坐标点pa(x
pa
,y
pa
)计算b
x
和by,mc(32768,32768)对应振镜坐标系下十字图形的中心点,pa(x
pa
,y
pa
)对应图像坐标系下十字图形的中心点,如图4所示。
[0073]bx
=32768-k
x
×
x
pa
;
[0074]by
=32768-ky×ypa
;
[0075]
本实施例中,步骤四到六,均由软件实现,本实施例中,将相机采样图片和m1、m2、m3、m4、mc的坐标输入软件,软件直接计算输出:k
x
=1.6361,ky=1.6447,b
x
=31972.7356,by=31976.5083。
[0076]
第七步:构建激光标刻补偿函数。本实施例中获得的激光标刻补偿函数为:
[0077]
x
mn
=1.6361
×
x
pn
+31972.7356;
[0078]ymn
=1.6447
×ypn
+31976.5083;
[0079]
将相机采集的待标刻图形记作p,将待标刻图形p变换到振镜振镜坐标系下的预期图形记作p’;(x
pn
,y
pn
)表示待标刻图形p上的第n个像素点在图像坐标系中的坐标,(x
mn
,y
mn
)表示预期图形p’上与待标刻图形p上的第n个像素点对应的像素点在振镜坐标系中的坐标。
[0080]
以下结合图5所示图形,对上述获得的激光标刻补偿函数进行验证。
[0081]
图5所示图形p由相机拍摄获得,通过软件结合上述第七步获得的激光标刻补偿函数,将该图形p变换到振镜坐标系下形成预期图形p’。即,将图形p记作图像坐标系下的坐标点集合将预期图形p’记作振镜坐标系下的坐标点集合则有:
[0082]
x
mk
=1.6361
×
x
pk
+31972.7356;
[0083]ymk
=1.6447
×ypk
+31976.5083;
[0084]
其中,k表示序数,k表示图形p上的像素点总数。
[0085]
根据坐标点集合在振镜坐标系下构建标刻模板,并结合标刻模板在标刻对象上蚀刻图形。本实施例中,最终蚀刻出的图形与图5所示图形完全一致,可见通过本发明获取的激光标刻补偿函数的精确,证明了本发明提供的激光标刻方法的可行性。
[0086]
图7所示,结合图形p和激光校准图形的相对位置对本发明提供的激光标刻校准函数做进一步论证。从图7可知,结合激光标刻补偿函数对图形p和十字图形进行坐标变换,最终在振镜坐标系下的期望图形p’和十字图形相对位置不变,可见在坐标变换过程中,图形没有变形。
[0087]
值得注意的是,本实施例中采用十字图形进行举例论证,具体实施时,激光校准图形也可采用正三角形、矩形等。
[0088]
以上仅为本发明创造的较佳实施例而已,并不用以限制本发明创造,凡在本发明
创造的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明创造的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1