一种锯类产品自动焊齿机及焊齿方法与流程
1.本发明属于锯类产品生产领域,具体涉及一种锯类产品自动焊齿机及焊齿方法。
背景技术:
2.锯类产品的核心功能部位是锯齿。通过安装到相应工具上,锯类产品可以对物体进行锯切加工。一般的锯类产品,其锯齿部分与锯本体(含锯身、锯柄、锯条背材)是同材质整体性,因此,锯齿切割功能部分的高硬度耐磨性与锯本体传动支撑需要的强韧性优势不明显,导致在一些高端需求特殊应用场景下,其常规锯齿的高硬度耐磨性能指标不够,从而会影响锯切作业效果和效率。
3.为了提高锯类产品的锯齿强度,现通过生成一种硬质合金刀头作为锯齿,然后将硬质合金刀头焊接到锯类产品的锯本体上,但是由于目前硬质合金刀头焊接效率较低,从而影响了锯类产品的生产效率。
技术实现要素:
4.本发明的主要目的在于提供一种锯类产品自动焊齿机及焊齿方法,用于提高锯类产品的生产效率。
5.第一方面,本发明提供一种锯类产品自动焊齿机,该自动焊齿机包括机箱,所述机箱内设置有焊齿机构、锯齿上料机构、锯身夹紧机构;
6.其中,所述锯齿上料机构包括振动盘、送料管、送料管固定块、焊接台,其中,所述送料管的第一端连接在所述振动盘的出料口,所述送料管的第二端设置在所述送料管固定块的固定孔内,所述固定孔位于所述焊接台的上方,所述送料管的第二端垂直所述焊接台的顶面;
7.所述锯身夹紧机构包括导轨、移动底板、杠杆机构、杠杆驱动气缸、第一铜极、第二铜极,其中,所述移动底板设置在所述导轨上,所述第一铜极安装在所述移动底板上,所述杠杆驱动气缸安装在所述移动底板上,所述杠杆机构的第一端安装在所述杠杆驱动气缸上,所述杠杆机构的第二端安装有所述第二铜极,所述第二铜极位于所述第一铜极的上方;
8.所述焊齿机构包括固定底板,所述固定底板上安装有焊接气缸,所述焊接气缸连接有第一移动台,所述第一移动台上安装有所述焊接台和第二移动台,所述第二移动台连接有送料气缸,所述第二移动台上安装有铜极块,所述铜极块的底面对齐所述焊接台的顶面。
9.作为上述技术方案的进一步优选的技术方案,所述振动盘用于装载输送硬质合金刀头,所述送料管的管内通道轮廓形状与所述硬质合金刀头的轮廓形状相同。
10.作为上述技术方案的进一步优选的技术方案,所述送料管固定块的底面安装在所述第二移动台上,所述送料管固定块向上弯折,所述送料管固定块的顶面位于所述焊接台上方,所述固定孔设置在所述送料管固定块的顶面上。
11.作为上述技术方案的进一步优选的技术方案,所述第一铜极和所述第二铜极用于
夹紧锯条背材,所述焊接台的顶面不低于所述第一铜极的顶面,所述焊接台的顶面不高于所述第二铜极的底面。
12.作为上述技术方案的进一步优选的技术方案,所述杠杆驱动气缸设置有两个,所述杠杆机构设置有两个,两个杠杆机构分别设置在所述第二铜极的两端。
13.作为上述技术方案的进一步优选的技术方案,所述导轨连接有一个伺服电机。
14.作为上述技术方案的进一步优选的技术方案,所述焊接气缸与所述第一移动台之间设置有弹簧,所述弹簧处于压缩状态。
15.作为上述技术方案的进一步优选的技术方案,所述固定底板设置在一块绝缘板上。
16.作为上述技术方案的进一步优选的技术方案,所述机箱上还设置有集成电路箱、集成气路箱。
17.本发明提供的锯类产品自动焊齿机,将硬质合金刀头装载到振动盘内,由送料管将硬质合金刀头依次输送到焊接台上,移动底板在导轨上通过伺服电机调整位置,从而调整第一铜极和第二铜极之间的锯片背材的位置,然后送料气缸推动第二移动台,焊接气缸推动第一移动台,使得铜极块推动焊接台上的硬质合金刀头至锯条背材上,硬质合金刀头与锯条背材接触后通电实现焊接。通过送料管的依次送料、移动底板的位置调整、送料气缸和焊接气缸的反复运动实现了在锯条背材上往复焊接硬质合金刀头,从而提高了硬质合金刀头的焊接效率,即提高了锯类产品的生产效率。
18.第二方面,本发明提供一种锯类产品自动焊齿方法,该方法由上述锯类产品自动焊齿机执行,该方法包括以下步骤:
19.步骤s1:在锯齿上料机构的振动盘内装入若干硬质合金刀头,在锯身夹紧机构的第一铜极和第二铜极之间装载锯条背材;
20.步骤s2:所述振动盘依次将所述硬质合金刀头通过送料管输送至焊接台上方;
21.步骤s3:所述锯身夹紧机构的移动底板移动到预设位置;
22.步骤s4:焊齿机构的送料气缸推动第二移动台;
23.步骤s5:焊齿机构的焊接气缸推动第一移动台;
24.步骤s6;复位所述送料气缸和所述焊接气缸;
25.步骤s7:重复所述步骤s3至所述步骤s6。
26.该方法的具体实现原理和效果与上述锯类产品自动焊齿机相同,可参考前述描述,在此不做重复赘述。
附图说明
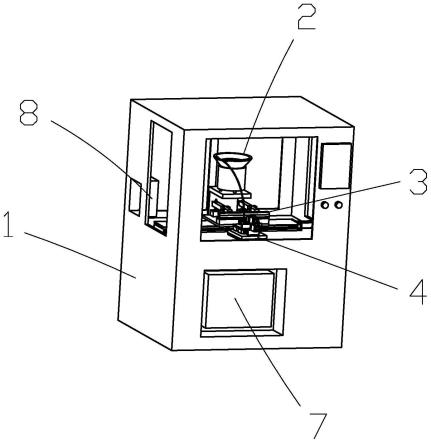
27.图1是本发明提供的一种锯类产品自动焊齿机结构示意图;
28.图2是本发明提供的一种锯齿上料机构结构示意图;
29.图3是本发明提供的一种送料管截面示意图;
30.图4是本发明提供的一种锯身夹紧机构结构示意图;
31.图5是本发明提供的一种焊齿机构结构示意图;
32.图6是本发明提供的一种铜极块结构示意图。
具体实施方式
33.以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本发明的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
34.参见附图的图1,图1是本发明提供的一种锯类产品自动焊齿机结构示意图,如图1所示,本发明提供的一种锯类产品自动焊齿机结构示意图,如图1所示,本发明提供的锯类产品自动焊齿机包括机箱1,该机箱1内设置有锯齿上料机构2、锯身夹紧机构3、焊齿机构4;
35.其中,锯齿上料机构2用于装载硬质合金刀头并将硬质合金刀头依次输送到焊接台24上。锯身夹紧机构3用于装载锯条背材并在焊接过程中调整锯条第一齿的位置。焊齿机构4用于将焊接台24上的硬质合金刀头推动至与锯条背材接触并通电实现焊接。
36.如图2所示,本发明提供的锯齿上料机构2包括振动盘21、送料管22、送料管固定块23、焊接台24,其中,所述送料管22的第一端连接在所述振动盘21的出料口,所述送料管22的第二端设置在所述送料管固定块23的固定孔231内,所述固定孔231位于所述焊接台24的上方,所述送料管22的第二端垂直所述焊接台24的顶面;
37.硬质合金刀头装载在震动盘内,由震动盘将硬质合金刀头输出进送料管22内,硬质合金刀头沿送料管22落下,掉落在焊接台24的顶面上。从而实现了硬质合金刀头的上料。
38.作为上述技术方案的进一步优选的技术方案,上述送料管22的管内通道轮廓形状与所述硬质合金刀头的轮廓形状相同。如图3所示,送料管22的截面轮廓与硬质合金刀头5的轮廓相同,因此,送料管22在输送硬质合金刀头的同时还可以使得硬质合金刀头5以预设角度位置落在焊接台24上。
39.作为上述技术方案的进一步优选的技术方案,上述焊接台24安装在焊齿机构4上,所述送料管固定块23的底面安装在所述焊接机构上,所述送料管固定块23向上弯折,所述送料管固定块23的顶面位于所述焊接台24上方,所述固定孔231设置在所述送料管固定块23的顶面上。
40.作为上述技术方案的进一步优选的技术方案,上述振动盘21安装在一个振动盘放置台25上。
41.作为上述技术方案的进一步优选的技术方案,所述振动盘放置台25安装在机箱1内部。
42.上述振动盘21通过一个振动盘放置台25安装在机箱1内部。
43.如图4所示,本发明提供的锯身夹紧机构3包括导轨31、移动底板32、杠杆机构33、杠杆驱动气缸34、第一铜极35、第二铜极36,其中,所述移动底板32设置在所述导轨31上,所述第一铜极35安装在所述移动底板32上,所述杠杆驱动气缸34安装在所述移动底板32上,所述杠杆机构33的第一端安装在所述杠杆驱动气缸34上,所述杠杆机构33的第二端安装有所述第二铜极36,所述第二铜极36位于所述第一铜极35的上方。
44.该第一铜极35和第二铜极36之间用于装载锯条背材6,杠杆驱动气缸34驱动杠杆机构33上下移动,从而在锯条背材6装入至第一铜极35和第二铜极36之间后,第二铜极36可以压紧锯条背材6。移动底板32在导轨31上移动,可以调整锯条背材的位置,从而使得硬质合金刀头可以被焊接在锯条背材6的各个位置。
45.上述焊接台24的顶面不低于所述第一铜极35的顶面,上述焊接台24的顶面不高于所述第二铜极36的底面。这样,焊接台24上的硬质合金刀头被推动至第一铜极35和第二铜极36之间的锯条背材上焊接时可以准确地焊接到锯条背材上。
46.作为上述技术方案的进一步优选的技术方案,所述杠杆驱动气缸34设置有两个,所述杠杆机构33设置有两个,两个杠杆机构33分别设置在所述第二铜极36的两端。采用两个杠杆驱动气缸34,在夹紧锯条背材时,可以让铜极与锯条背材之间的压力更加均衡,有利于提高焊接稳定性。
47.作为上述技术方案的进一步优选的技术方案,所述杠杆机构33垂直所述第二铜极36。该方案提高了杠杆机构33带动第二铜极36上下移动时的稳定性。
48.作为上述技术方案的进一步优选的技术方案,所述导轨31连接有一个伺服电机37,通过伺服电机37控制移动底板32在导轨31上的位置移动,从而实现锯条背材的位置调节。
49.作为上述技术方案的进一步优选的技术方案,上述导轨31安装在所述机箱1内部。
50.如图5所示,本发明提供的焊齿机构4包括固定底板41,所述固定底板41上安装有焊接气缸42,所述焊接气缸42连接有第一移动台43,所述第一移动台43上安装有所述焊接台24和第二移动台44,所述第二移动台44连接有送料气缸45,所述第二移动台44上安装有铜极块46,所述铜极块46的底面对齐所述焊接台24的顶面。
51.上述送料管固定块23与焊接台24之间存在空隙,空隙用于容纳焊接台24上的硬质合金刀头,且上述铜极块46可以通过该空隙,从而使得铜极块46可以伸入进空隙内推动硬质合金刀头。
52.具体地,当硬质合金刀头落入到焊接台24上后,由送料气缸45推动第二移动台44,进而使得铜极块46前伸推动硬质合金刀头,焊接气缸42前伸,带动第一焊接台24向前移动,使得硬质合金刀头被挤压在锯条背材上,然后铜极块46通电完成焊接。
53.采用送料气缸45和焊接气缸42,将焊接过程分为送料动作和焊接动作,从而可以有效提高铜极块46的焊接次数,还可以提高焊接稳定性。
54.作为上述技术方案的进一步优选的技术方案,上述铜极块46的前端设置有开槽461,如图6所示,该开槽461的形状与硬质合金刀头的形状匹配,从而使得硬质合金刀头可以按预设角度方向被推到锯条背材上完成焊接。
55.作为上述技术方案的进一步优选的技术方案,所述焊接气缸42与所述第一移动台43之间设置有弹簧47,所述弹簧47处于压缩状态。弹簧47一直处于压缩状态,从而给了第一移动台43一个向锯身夹紧机构3的力,促使焊接完成。
56.作为上述技术方案的进一步优选的技术方案,所述第二移动台44上方设置有铜极压块48,所述铜极压块48压于所述铜极块46上方。铜极压块48用于固定所述铜极块46。
57.作为上述技术方案的进一步优选的技术方案,所述固定底板41设置在一块绝缘板49上。
58.作为上述技术方案的进一步优选的技术方案,所述绝缘板49安装在机箱1内部。
59.作为上述技术方案的进一步优选的技术方案,所述机箱1上还设置有集成电路箱7、集成气路箱8。集成电路箱7用于控制电压电流,集成气路箱8用于控制气缸动作。
60.本发明提供的锯类产品自动焊齿机,将硬质合金刀头装载到振动盘21内,由送料
管22将硬质合金刀头依次输送到焊接台24上,移动底板32在导轨31上通过伺服电机37调整位置,从而调整第一铜极35和第二铜极36之间的锯片背材的位置,然后送料气缸45推动第二移动台44,焊接气缸42推动第一移动台43,使得铜极块46推动焊接台24上的硬质合金刀头至锯条背材上,硬质合金刀头与锯条背材接触后通电实现焊接。通过送料管22的依次送料、移动底板32的位置调整、送料气缸45和焊接气缸42的反复运动实现了在锯条背材上往复焊接硬质合金刀头,从而提高了硬质合金刀头的焊接效率,即提高了锯条的生产效率。
61.本发明还提供一种锯类产品自动焊齿方法,该方法由上述锯类产品自动焊齿机执行,该方法包括以下步骤:
62.步骤s1:在锯齿上料机构的振动盘内装入若干硬质合金刀头,在锯身夹紧机构的第一铜极和第二铜极之间装载锯条背材;
63.步骤s2:所述振动盘依次将所述硬质合金刀头通过送料管输送至焊接台上方;
64.步骤s3:所述锯身夹紧机构的移动底板移动到预设位置;
65.步骤s4:焊齿机构的送料气缸推动第二移动台;
66.步骤s5:焊齿机构的焊接气缸推动第一移动台;
67.步骤s6;复位所述送料气缸和所述焊接气缸;
68.步骤s7:重复所述步骤s3至所述步骤s6。
69.通过步骤s7,在锯条背材的第一位置完成硬质合金刀头的焊接后,移动移动底板的位置,从而下一次硬质合金刀头的焊接可以焊接到锯条背材的其他位置,通过重复步骤s3至s6,将若干硬质合金刀头焊接到整个锯条背材上,从而完成锯条的生产。
70.该方法的具体实现原理和效果与上述锯类产品自动焊齿机相同,可参考前述描述,在此不做重复赘述。
71.值得一提的是,本发明专利申请涉及的铜极通电焊接等技术特征应被视为现有技术,这些技术特征的具体结构、工作原理以及可能涉及到的控制方式、空间布置方式采用本领域的常规选择即可,不应被视为本发明专利的发明点所在,本发明专利不做进一步具体展开详述。
72.对于本领域的技术人员而言,依然可以对前述各实施例所记载的技术方案进行修改,或对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1