一种大口径管道自动化焊接机器人的制作方法
1.本发明属于大口径管道焊接技术领域,特别涉及一种大口径管道自动化焊接机器人。
背景技术:
2.在大口径管道焊接过程中,由于焊缝较长,且需要做圆周运动,工作强度大,以往的手工焊接方式效果较差,现有的自动化焊接机器人在使用过程中存在以下问题:1)不由于各行业对管道口径的要求不一,通常会对多口径管道均有焊接需求,现有的焊接机器人对多口径的焊接适应性不佳;2)现有的焊接机器人队友多口径的调节大多采用固定齿圈或轨道,采用伸缩缸带动焊枪移动的方式适应多口径调节,但是此种方法焊接时需要对圆心进行重新校对,以保证焊接质量,费时费力;3)现有的采用单一滚轮绕管道行走的机器人容易出现驱动轮与管道之间摩擦力不够出现打滑现象,影响焊缝质量;4)现有的管道焊接过程中为使管道抗扭矩更好,通常会使管道接缝处出现交错分布,现有的焊接设备对焊缝的变化不能起到良好的适应效果,实际焊接过程中效果不佳。
技术实现要素:
3.本发明的目的是克服现有技术中不足,提供一种大口径管道自动化焊接机器人,通过设置可调节的齿条轨道,设置可调节的行走机构沿齿条轨道运动,以此完成对多口径管道的焊接工作,同时将焊枪活动安装在滑轨上可沿焊缝方向随时调节,保证焊缝质量。
4.为了实现上述目的,本发明采用的技术方案是:
5.一种大口径管道自动化焊接机器人,包括管道、机架、托辊、液压伸缩杆ⅰ、轨道转移机构、齿条轨道、行走机构、支撑机构、电机ⅰ、上滚轮、电机ⅱ、连接带、拉簧、锁紧扣,所述机架底部设有若干托辊,托辊一端所设链轮通过链条啮合连接,其中一组托辊一侧固定连接电机ⅰ输出端,机架上方设有液压伸缩杆ⅰ,液压伸缩杆ⅰ另一端设有上滚轮,上滚轮一端固定连接电机ⅱ输出端,上滚轮与托辊之间放置有管道,两组机架之间设有若干轨道转移机构,轨道转移机构一侧设有齿条轨道,齿条轨道安装在管道上,齿条轨道由两根齿条组成,两根齿条一端固定连接,另一端设有连接带,连接带活动安装在齿条轨道内部,连接带一端固定安装有拉簧,拉簧另一端固定安装在齿条轨道内部,连接带与齿条轨道活动连接处设有锁紧扣,齿条轨道下方设有行走机构,行走机构下方设有支撑机构;
6.所述锁紧扣包括安装套筒、连接套筒、电动伸缩杆ⅱ、锁紧杆,连接套筒固定安装在齿条轨道一侧,连接套筒外部固定安装有安装套筒,安装套筒外侧活动连接有电动伸缩杆ⅱ一端,电动伸缩杆ⅱ另一端固定安装有锁紧杆。
7.所述轨道转移机构包括液压伸缩杆ⅱ、连接板、液压伸缩杆ⅲ、限位块、锥形杆、电动伸缩杆ⅰ,液压伸缩杆ⅱ一端固定安装在机架上,另一端固定安装连接板,连接板一侧固定安装液压伸缩杆ⅲ一端,液压伸缩杆ⅲ另一端活动安装有限位块,限位块下方活动安装有锥形杆,锥形杆尾部与限位块之间设有电动伸缩杆ⅰ。
8.所述行走机构包括支撑杆、滑轨、焊枪、电动伸缩杆ⅲ、连杆ⅰ、电动伸缩杆ⅳ、连杆ⅱ、电动伸缩杆
ⅴ
、电动伸缩杆ⅵ、电动伸缩杆ⅶ、驱动电机、驱动齿轮、滚轮,支撑杆一侧设有滑轨,滑轨上活动安装有焊枪,焊枪与支撑杆之间设有电动伸缩杆ⅲ,支撑杆靠近管道一侧设有滚轮,支撑杆上活动安装有两组完全相同的连杆ⅰ,连杆ⅰ上活动链接电动伸缩杆ⅳ一端,电动伸缩杆ⅳ另一端活动连接在支撑杆一端,连杆ⅰ上活动安装有连杆ⅱ,连杆ⅰ与连杆ⅱ之间活动安装有电动伸缩杆
ⅴ
,连杆ⅱ另一端活动安装有电动伸缩杆ⅵ,电动伸缩杆ⅵ一端设有滚轮,电动伸缩杆ⅵ与连杆ⅱ之间活动安装有电动伸缩杆ⅶ,两组连杆ⅱ相互靠近一侧固定安装有驱动电机,驱动电机输出端设有驱动齿轮。
9.所述支撑机构包括液压伸缩杆ⅳ、活动架、导向杆、液压伸缩杆
ⅴ
、卡扣板,液压伸缩杆ⅳ一端固定安装在机架上,另一端固定连接活动架,活动架两端活动安装在导向杆上,导向杆固定安装在机架上,活动架上设有若干液压伸缩杆
ⅴ
,液压伸缩杆
ⅴ
另一端固定安装有卡扣板。
10.本发明与现有技术相比较有益效果表现在:
11.1)通过设置可调节的齿条轨道,将两根齿条并排放置,并将一端固定,随后在齿条另一端通过连接带与拉簧配合,完成自动收缩功能,并设置有锁紧扣,可对连接带进行自动锁紧操作,两根齿条交错分布,并分别配备有驱动电机与驱动齿轮啮合,保证轨道的连续性,保证行走机构能够带动焊枪做圆周运动;
12.2)行走机构中,通过三组滚轮将整体设备安装在管道上,通过齿轮与齿条啮合传动提供动力,防止打滑现场的发生,在齿条变径时,通过调节齿轮位置,可保证齿轮与齿牙的啮合,保证行走机构的顺利转动;
13.3)将焊枪活动安装在导轨上,可实现焊枪的左右移动,以此来满足不同焊缝的焊接需求,保证焊缝质量。
附图说明
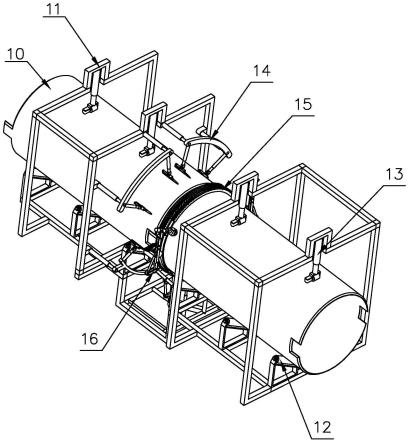
14.附图1是本发明一种大口径管道自动化焊接机器人结构示意图;
15.附图2是本发明一种大口径管道自动化焊接机器人侧面结构示意图;
16.附图3是机架结构示意图;
17.附图4是轨道转移机构结构示意图;
18.附图5是支撑机构结构示意图;
19.附图6是行走机构结构示意图;
20.附图7是齿条轨道内部结构示意图;
21.附图8是锁紧扣结构示意图;
22.图中:10、管道;11、机架;12、托辊;13、液压伸缩杆ⅰ;14、轨道转移机构;15、齿条轨道;16、行走机构;17、支撑机构;121、电机ⅰ;131、上滚轮;132、电机ⅱ;141、液压伸缩杆ⅱ;142、连接板;143、液压伸缩杆ⅲ;144、限位块;145、锥形杆;146、电动伸缩杆ⅰ;151、连接带;152、拉簧;153、锁紧扣;1531、安装套筒;1532、连接套筒;1533、电动伸缩杆ⅱ;1534、锁紧杆;161、支撑杆;162、滑轨;1621、焊枪;1622、电动伸缩杆ⅲ;163、连杆ⅰ;1631、电动伸缩杆ⅳ;164、连杆ⅱ;1641、电动伸缩杆
ⅴ
;165、电动伸缩杆ⅵ;1651、电动伸缩杆ⅶ;166、驱动电机;1661、驱动齿轮;167、滚轮;171、液压伸缩杆ⅳ;172、活动架;173、导向杆;174、液压伸缩
杆
ⅴ
;175、卡扣板。
具体实施方式
23.为方便本技术领域人员的理解,下面结合附图1-8,对本发明的技术方案进一步具体说明。
24.一种大口径管道自动化焊接机器人,包括管道10、机架11、托辊12、液压伸缩杆ⅰ13、轨道转移机构14、齿条轨道15、行走机构16、支撑机构17、电机ⅰ121、上滚轮131、电机ⅱ132、连接带151、拉簧152、锁紧扣153,所述机架11底部设有若干托辊12,托辊12一端所设链轮通过链条啮合连接,其中一组托辊12一侧固定连接电机ⅰ121输出端,机架11上方设有液压伸缩杆ⅰ13,液压伸缩杆ⅰ13另一端设有上滚轮131,上滚轮131一端固定连接电机ⅱ132输出端,上滚轮131与托辊12之间放置有管道10,两组机架11之间设有若干轨道转移机构14,轨道转移机构14一侧设有齿条轨道15,齿条轨道15安装在管道10上,齿条轨道15由两根齿条组成,两根齿条一端固定连接,另一端设有连接带151,连接带151活动安装在齿条轨道15内部,连接带151一端固定安装有拉簧152,拉簧152另一端固定安装在齿条轨道15内部,连接带151与齿条轨道15活动连接处设有锁紧扣153,齿条轨道15下方设有行走机构16,行走机构16下方设有支撑机构17;
25.所述锁紧扣153包括安装套筒1531、连接套筒1532、电动伸缩杆ⅱ1533、锁紧杆1534,连接套筒1532固定安装在齿条轨道15一侧,连接套筒1532外部固定安装有安装套筒1531,安装套筒1531外侧活动连接有电动伸缩杆ⅱ1533一端,电动伸缩杆ⅱ1533另一端固定安装有锁紧杆1534。
26.所述轨道转移机构14包括液压伸缩杆ⅱ141、连接板142、液压伸缩杆ⅲ143、限位块144、锥形杆145、电动伸缩杆ⅰ146,液压伸缩杆ⅱ141一端固定安装在机架11上,另一端固定安装连接板142,连接板142一侧固定安装液压伸缩杆ⅲ143一端,液压伸缩杆ⅲ143另一端活动安装有限位块144,限位块144下方活动安装有锥形杆145,锥形杆145尾部与限位块144之间设有电动伸缩杆ⅰ146。
27.所述行走机构16包括支撑杆161、滑轨162、焊枪1621、电动伸缩杆ⅲ1622、连杆ⅰ163、电动伸缩杆ⅳ1631、连杆ⅱ164、电动伸缩杆
ⅴ
1641、电动伸缩杆ⅵ165、电动伸缩杆ⅶ1651、驱动电机166、驱动齿轮1661、滚轮167,支撑杆161一侧设有滑轨162,滑轨162上活动安装有焊枪1621,焊枪1621与支撑杆161之间设有电动伸缩杆ⅲ1622,支撑杆161靠近管道一侧设有滚轮167,支撑杆161上活动安装有两组完全相同的连杆ⅰ163,连杆ⅰ163上活动链接电动伸缩杆ⅳ1631一端,电动伸缩杆ⅳ1631另一端活动连接在支撑杆161一端,连杆ⅰ163上活动安装有连杆ⅱ164,连杆ⅰ163与连杆ⅱ164之间活动安装有电动伸缩杆
ⅴ
1641,连杆ⅱ164另一端活动安装有电动伸缩杆ⅵ165,电动伸缩杆ⅵ165一端设有滚轮167,电动伸缩杆ⅵ165与连杆ⅱ164之间活动安装有电动伸缩杆ⅶ1651,两组连杆ⅱ164相互靠近一侧固定安装有驱动电机166,驱动电机166输出端设有驱动齿轮1661。
28.所述支撑机构17包括液压伸缩杆ⅳ171、活动架172、导向杆173、液压伸缩杆
ⅴ
174、卡扣板175,液压伸缩杆ⅳ171一端固定安装在机架11上,另一端固定连接活动架172,活动架172两端活动安装在导向杆173上,导向杆173固定安装在机架11上,活动架172上设有若干液压伸缩杆
ⅴ
174,液压伸缩杆
ⅴ
174另一端固定安装有卡扣板175。
29.一种大口径管道自动化焊接机器人,工作过程如下:管道10放置在托辊12与上滚轮131之间传送,传送至指定位置后,轨道转移机构14将齿条轨道15放置在管道指定位置,齿条轨道15中拉簧会拉动连接带151,使齿条轨道15贴合在管道外壁上,随后电动伸缩杆ⅱ1533带动锁紧杆1534收缩,配合安装套筒1531将连接带151锁紧,防止移动,此时齿条轨道15安装完毕,支撑机构17中液压伸缩杆ⅳ171带动活动架172运动,使行走机构16中驱动齿轮1661能够与齿条轨道15啮合,此时液压伸缩杆
ⅴ
174带动行走机构16整体上升,使支撑杆161一侧滚轮167紧贴管道外表面,此时工作人员可根据实际焊接需求,调节焊枪1621与焊缝之间距离,随后电动伸缩杆ⅳ1631带动连杆ⅰ163移动,电动伸缩杆
ⅴ
1641带动连杆ⅱ164移动,使驱动齿轮1661能够与齿条轨道15啮合,随后继续调整电动伸缩杆ⅵ165与电动伸缩杆ⅶ1651,使滚轮167紧贴管道外表面,此时驱动电机166带动驱动齿轮1661转动,会使行走机构沿齿条轨道15转动,通过电动伸缩杆ⅲ1622调节焊枪1621位置,完成管道10焊接操作,焊接完成后,行走机构回到原位置,由支撑机构17中液压伸缩杆
ⅴ
升高,使行走机构16落入卡扣板175中固定,随后行走机构16中各伸缩杆放松,脱离管道10,随后液压伸缩杆ⅲ143伸长,将锥形杆145贴合管道外表面,随后液压伸缩杆ⅱ141与电动伸缩杆ⅰ146配合,将锥形杆145推至齿条轨道15下方,同时电动伸缩杆ⅱ1533伸长,取消锁紧,使连接带151能够正常活动,液压伸缩杆ⅲ143收缩,将齿条轨道15撑开脱离管道10表面,此时管道10可正常传送,随后等待下一次焊接时,轨道转移机构14再度将齿条轨道15放置在管道10表面,重复以上操作完成焊接。
30.以上内容仅仅是对本发明的结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1