一种基于脉冲协调的双钨极堆焊装置及方法与流程
1.本发明涉及堆焊技术领域,具体而言,涉及一种基于脉冲协调的双钨极堆焊装置及方法。
背景技术:
2.核反应堆压力容器是核电厂全寿命运行过程中不可更换的核心设备,其重要性不言而喻。核反应堆压力容器在制造过程中,堆焊过程是重中之重。
3.目前常用的堆焊装置有带极堆焊装置、手工电弧焊装置和氩弧焊装置。带极堆焊装置在焊接时熔敷效率高,控制方式简单,但是对操作工艺要求高,容易出现缺陷,焊接质量易出现隐患;手工电弧焊装置自动化程度低,焊接质量易受操作人员影响,生产质量和生产效率不稳定;氩弧焊装置的控制方式复杂度适中,但是应用在堆焊中,由于其热影响区域较大,工件在焊接修补后会出现开裂、形变等问题,焊接质量和效率较低。
技术实现要素:
4.本发明解决的问题是如何提高堆焊装置的生产质量和生产效率。
5.为解决上述问题,本发明提供一种基于脉冲协调的双钨极堆焊装置及方法。
6.第一方面,本发明提供的一种基于脉冲协调的双钨极堆焊装置,包括焊接电源、送丝机、触发器、电气控制系统和双钨极焊枪,所述触发器、所述焊接电源和所述送丝机依次电连接,所述焊接电源与所述电气控制系统电连接,所述双钨极焊枪与所述焊接电源电连接;
7.所述触发器与所述电气控制系统电连接,所述触发器用于根据所述电气控制系统获取的焊接参数对所述焊接电源进行脉冲调节,以使所述送丝机进行送丝,其中,所述焊接参数包括脉冲参数和振动频率,所述脉冲调节包括脉冲形式调节和相位差调节;
8.所述双钨极焊枪用于在所述送丝机送丝时进行堆焊。
9.可选地,所述送丝机上设有标准焊丝和振动焊丝,且所述振动焊丝叠加设置在所述标准焊丝上,所述送丝机用于根据所述振动频率使所述振动焊丝沿送丝方向振动,以实现振动送丝。
10.可选地,还包括通信连接的监控装置和操作面板,所述操作面板与所述电气控制系统通信连接,所述监控装置与所述操作面板通信连接,且所述监控装置用于实时获取焊接信息,并将所述焊接信息发送至所述操作面板,所述操作面板用于在根据所述焊接信息进行堆焊风险判断后将判断结果发送至所述电气控制系统,其中,所述焊接信息包括焊枪位置信息和工件位置信息。
11.可选地,所述基于脉冲协调的双钨极堆焊装置还包括报警装置,所述报警装置与所述操作面板电连接,用于在存在堆焊风险时进行报警。
12.可选地,所述基于脉冲协调的双钨极堆焊装置还包括热丝电源;
13.所述热丝电源与所述电气控制系统和所述送丝机电连接,所述热丝电源用于基于
所述电气控制系统的控制,在所述送丝机送丝前对所述标准焊丝和所述振动焊丝进行焊丝预热。
14.可选地,所述基于脉冲协调的双钨极堆焊装置还包括两个冷却系统和工作台;
15.两个所述冷却系统分别设置在所述双钨极焊枪的两侧,所述冷却系统与所述电气控制系统电连接,所述冷却系统用于基于所述电气控制系统的控制,在焊接时对所述双钨极焊枪进行降温;
16.所述工作台为与所述电气控制系统电连接的转台,且所述工作台与所述双钨极焊枪对应设置,用于固定工件并在所述电气控制系统的控制下带动所述工件旋转运动。
17.可选地,所述基于脉冲协调的双钨极堆焊装置还包括送气系统;
18.所述送气系统与所述双钨极焊枪连接,所述送气系统与所述电气控制系统电连接,且所述送气系统用于基于所述电气控制系统的控制,在焊接时向所述双钨极焊枪输送保护气体。
19.第二方面,本发明还提供了一种基于脉冲协调的双钨极堆焊方法,基于如上述所述的基于脉冲协调的双钨极堆焊装置,所述基于脉冲协调的双钨极堆焊方法包括:
20.利用触发器获取控制系统发送的焊接参数,并根据所述脉冲参数对所述焊接电源进行脉冲调节,其中所述脉冲调节包括脉冲形式调节和相位差调节,所述焊接参数根据工件的焊接位置得到,所述焊接参数包括脉冲参数和振动频率;
21.利用送丝机根据所述焊接电源的输出脉冲和所述振动频率进行送丝;
22.利用双钨极焊枪在所述送丝机送丝时对工件进行堆焊。
23.可选地,所述根据工件的焊接位置得到焊接参数的方法包括:
24.根据所述焊接位置得到所述焊接特性;
25.根据所述焊接特性得到脉冲组合;
26.根据所述脉冲组合得到所述焊接参数。
27.可选地,所述基于脉冲协调的双钨极堆焊装置得控制方法还包括:
28.获取监控装置发送的初始焊接信息和实时焊接信息;
29.将所述实时焊接信息与所述初始焊接信息进行比较,根据比较结果判断是否存在堆焊风险。
30.本发明的有益效果为:
31.采用双钨极焊枪进行堆焊,可产生复合焊接电弧,其焊接电弧能量高、弧压低、焊丝熔覆率提升、稀释率降低,可减少例如熔穿、驼峰等焊接缺陷的产生,提升焊缝质量。设置触发器与电气控制系统和焊接电源电连接,在获取脉冲参数后,对焊接电源的输出电流进行精准调节,以使送丝机根据调节后的输出电流调节送丝速度,根据工件的不同焊接位置进行高质量堆焊,例如,采用两个焊接电源和两个送丝机进行送丝,当工件的焊接位置为横焊位时,触发器分别将两个焊接电源的输出电流调为脉冲,并根据实际情况调节相位差等参数,两个送丝机分别根据两个焊接电源的脉冲进行送丝,以进行针对横焊位工件的高质量焊接,有效增加了堆焊效率,提高了堆焊装置的生产质量和生产效率,也提升了堆焊装置的智能化程度。同时送丝机可根据振动频率实现振动送丝,对熔池具有搅拌作用,起到细化晶粒,使得堆焊层组织均匀,优化焊缝成型,有效提高焊接熔池的流动性,进而增加堆焊效率。通过触发器实现高精准度的脉动、振动送丝,有效减少焊接热量,减少工件变形,使得焊
缝的热影响区减小,具有更高的抗冲击强度,增加焊接质量的同时,也提高了生产效率。
附图说明
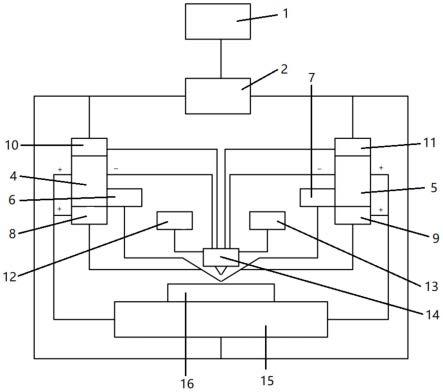
32.图1为本发明实施例的基于脉冲协调的双钨极堆焊装置的结构示意图一;
33.图2为本发明实施例的基于脉冲协调的双钨极堆焊装置的结构示意图二;
34.图3为本发明实施例的堆焊完成的焊缝成型示意图;
35.图4为本发明实施例的基于脉冲协调的双钨极堆焊方法的流程示意图;
36.图5为本发明实施例的第一脉冲组合电流形态示意图;
37.图6为本发明实施例的第二脉冲组合电流形态示意图;
38.图7为本发明实施例的第三脉冲组合电流形态示意图;
39.图8为本发明实施例的第四脉冲组合电流形态示意图;
40.图9为本发明实施例的第五脉冲组合电流形态示意图;
41.图10为本发明实施例的第六脉冲组合电流形态示意图;
42.图11为本发明实施例的第七脉冲组合电流形态示意图。
43.附图标记说:
44.1-操作面板;2-电气控制系统;3-触发器;4-第一焊接电源;5-第二焊接电源;6-第一送丝机;7-第二送丝机;8-第一热丝电源;9-第二热丝电源;10-第一送气系统;11-第二送气系统;12-第一冷却系统;13-第二冷却系统;14-双钨极焊枪;15-工作台;16-工件。
具体实施方式
45.为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
46.在本技术实施例的描述中,术语“一些实施例”的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
47.如图1和图2所示,本发明实施例提供了一种基于脉冲协调的双钨极堆焊装置,包括焊接电源、送丝机、触发器3、电气控制系统2和双钨极焊枪14,所述触发器3、所述焊接电源和所述送丝机依次电连接,所述焊接电源与所述电气控制系统2电连接,所述双钨极焊枪14与所述焊接电源电连接;
48.所述触发器3与所述电气控制系统2电连接,所述触发器3用于根据所述电气控制系统2获取的焊接参数对所述焊接电源进行脉冲调节,以使所述送丝机进行送丝,其中,所述焊接参数包括脉冲参数和振动频率,所述脉冲调节包括脉冲形式调节和相位差调节;
49.所述双钨极焊枪14用于在所述送丝机送丝时进行堆焊。
50.具体地,如图1所示的基于脉冲协调的双钨极堆焊装置,包括焊接电源、送丝机、触发器3、电气控制系统2和双钨极焊枪14。电气控制系统2分别与双钨极焊枪14、焊接电源和送丝机电连接,用于控制基于脉冲协调的双钨极堆焊装置进行堆焊。双钨极焊枪14与焊接电源连接,焊接电源为双钨极焊枪14的焊接运动提供动力。采用双钨极焊枪14进行堆焊,通过两根钨极可产生复合焊接电弧,相比于单钨极产生的焊接电弧能量更高、弧压更低、焊丝
熔覆率提升、稀释率降低,可减少例如熔穿、驼峰等焊接缺陷的产生,提升焊缝质量。
51.本实施例中,设置两个焊接电源和两个送丝机,分别为第一焊接电源4、第一送丝机6、第二焊接电源5和第二送丝机7,第一焊接电源4与第一送丝机6电连接,通过输出电流和振动频率控制第一送丝机6进行脉动振动送丝,第二焊接电源5与第二送丝机7电连接,通过输出电流和振动频率控制第二送丝机7进行脉动振动送丝,其中可通过调节焊接电源的输出电流和振动频率以调节送丝机的送丝速度。
52.如图2所示,触发器3与电气控制系统2电连接,用于获取电气控制系统2发送的焊接参数,其中焊接参数包括脉冲参数和振动频率。设置触发器3分别与两个送丝系统中的第一焊接电源4和第二焊接电源5电连接,触发器3获取脉冲参数后分别对第一焊接电源4和第二焊接电源5进行输出脉冲的调节,具体包括对两个焊接电源输出的电流种类(脉冲或直流)进行调节,或在两个焊接电源输出电流均为脉冲时的相位差调节(可调范围为0
°‑
180
°
),以调节送丝机的送丝速度,实现根据工件16的焊接位置进行堆焊,例如,工件16的焊接位置为平焊位时,触发器3调节两个焊接电源的输出为脉冲,且相位差为180
°
,此时两台送丝机的送丝速度相同,当焊接电源处于峰值脉冲时,送丝机处于峰值送丝速度;当焊接电源处于基值脉冲时,送丝机处于基值送丝速度。双钨极焊枪14根据该送丝速度焊接出的工件16如图3所示,其焊缝成形优良,同时提高了焊接效率。
53.具体地,本实施例所提供的焊接电源为tigspeed 552synergic hw、送丝机为tigspeed drive 4rob、电气控制系统2为06udvcpu+rt1456,包括但不限于上述的型号。
54.另外地,触发器3还可根据工件16的焊接位置进行电流大小的调节。
55.本实施例中,采用双钨极焊枪14进行堆焊,可产生复合焊接电弧,其焊接电弧能量高、弧压低、焊丝熔覆率提升、稀释率降低,可减少例如熔穿、驼峰等焊接缺陷的产生,提升焊缝质量。设置触发器3与电气控制系统2和焊接电源电连接,在获取脉冲参数后,对焊接电源的输出电流进行精准调节,以使送丝机根据调节后的输出电流调节送丝速度,根据工件16的不同焊接位置进行高质量堆焊,例如,采用两个焊接电源和两个送丝机进行送丝,当工件16的焊接位置为横焊位时,触发器3分别将两个焊接电源的输出电流调为脉冲,并根据实际情况调节相位差等参数,两个送丝机分别根据两个焊接电源的脉冲进行送丝,以进行针对横焊位工件16的高质量焊接,有效增加了堆焊效率,提高了堆焊装置的生产质量和生产效率,也提升了堆焊装置的智能化程度。同时送丝机可根据振动频率实现振动送丝,对熔池具有搅拌作用,起到细化晶粒,使得堆焊层组织均匀,优化焊缝成型,有效提高焊接熔池的流动性,进而增加堆焊效率。通过触发器3实现高精准度的脉动、振动送丝,有效减少焊接热量,减少工件变形,使得焊缝的热影响区减小,具有更高的抗冲击强度,增加焊接质量的同时,也提高了生产效率。
56.可选地,所述送丝机上设有标准焊丝和振动焊丝,且所述振动焊丝叠加设置在所述标准焊丝上,所述送丝机用于根据所述振动频率使所述振动焊丝沿送丝方向振动,以实现振动送丝。
57.具体地,送丝机在标准的焊接过程中仅设置有一根标准焊丝,而在本实施例中,通过叠加一根振动焊丝,以实现送丝机的振动送丝,即第一送丝机6和第二送丝机7根据焊接电源输出的脉冲电流分别对标准焊丝进行脉动送丝,在第一送丝机6和第二送丝机7上各叠加一根振动焊丝,与送丝机连接的第一焊接电源4和第二焊接电源5获取到振动频率后,分
别控制第一送丝机6和第二送丝机7根据振动频率分别对两根振动焊丝进行振动送丝,在振动送丝过程中,振动焊丝沿送丝方向进行来回往复运动,以实现对熔池的搅拌作用。
58.本实施例中,通过在送丝机上添加振动焊丝,并根据振动频率对振动焊丝进行振动送丝,对熔池具有搅拌作用,起到细化晶粒,使得堆焊层组织均匀,优化焊缝成型,有效提高焊接熔池的流动性,进而增加堆焊效率。
59.可选的,本实施例基于脉冲协调的双钨极堆焊装置还包括通信连接的监控装置和操作面板1,所述操作面板1与所述电气控制系统2通信连接,所述监控装置与所述操作面板1通信连接,且所述监控装置用于实时获取焊接信息,并将所述焊接信息发送至所述操作面板1,所述操作面板1用于根据所述焊接信息进行堆焊风险判断,其中,所述焊接信息包括焊枪位置信息和工件位置信息。
60.具体地,操作面板分别与监控装置和电气控制系统2通信连接,操作面板为触屏面板,用于操作员手动输入焊接参数,并发送给电气控制系统2。监控装置与电气控制系统2电连接,监控装置可为视觉传感器和/或位置传感器,设置在双钨极焊枪14对工件16进行焊接作业处(可通过连接杆和导线与电气控制装置连接。由于焊接处温度较高,为保证监控装置的正常运行,可利用连接杆将监控装置设置在距离焊接处预设距离的位置)。监控装置与操作面板1通信连接,在双钨极堆焊装置根据焊接参数运行前,获取焊接信息,即双钨极焊枪14的位置信息和工件16的焊接位置信息,并发送给操作面板1,操作面板1将判定焊接信息是否与设定的焊接参数对应,若不对应,则判定焊接存在风险,停止焊接,若对应,则判定焊接没有风险,开始根据设定的焊接参数进行焊接。同时,在焊接过程中,双钨极焊枪14的倾斜角度等和工件16的焊接位置可能会发生位移,导致堆焊质量降低,此时通过监控装置实时获取双钨极焊枪14的位置信息和工件16的焊接位置信息,并发送给操作面板1进行焊接风险判断,判定出现焊接风险时及时停止焊接,避免生产出质量不合格的产品,增加生产成本。
61.本实施例中,通过设置监控装置和操作面板1通信连接,实时获取焊接信息,并发送至操作面板1进行风险判断,并发送至电气控制系统2,当存在风险时,电气控制系统2控制焊接电源、送丝机和双钨极焊枪停止运动,进而及时停止焊接。实时获取焊接信息,可实现对焊枪位置、工件位置的实时监控,避免当焊枪位置和工件位置出现一定偏差时还进行焊接导致焊接质量下降,生产成本和时间成本增加,有效提高了堆焊效率和堆焊质量。
62.可选的,本实施例基于脉冲协调的双钨极堆焊装置还包括报警装置,所述报警装置与所述操作面板1电连接,用于在存在堆焊风险时进行报警。
63.具体地,在操作面板1上还设置有报警装置,报警装置可为具有多色的灯光报警装置或声音报警装置,例如当操作面板1根据监控装置发送的焊接信息判定为存在焊接风险时,灯光报警装置由绿色切换为红色,以提示操作人员进行处理,没有风险时灯光报警装置保持绿色,以提示操作人员堆焊装置正常运行;或存在风险时声音报警装置发出声音,提示操作人员进行处理。
64.本实施例中,通过设置报警装置,可在操作面板1判定堆焊装置存在焊接风险时进行报警,以提示操作人员进行及时处理,避免堆焊装置停止运行时间过长导致生产效率降低。
65.可选地,本实施例基于脉冲协调的双钨极堆焊装置还包括热丝电源;
66.所述热丝电源与所述电气控制系统2和所述送丝机电连接,所述热丝电源用于基于所述电气控制系统2的控制,在所述送丝机送丝前对所述标准焊丝和所述振动焊丝进行焊丝预热。
67.具体地,如图1所示,本实施例设置两个热丝电源,两个热丝电源为第一热丝电源8和第二热丝电源9,分别与电气控制系统2电连接,第一热丝电源8与第一送丝机6电连接、第二热丝电源9与第二送丝机7电连接,电气控制系统2控制第一热丝电源8和第二热丝电源9当第一送丝机6和第二送丝机7运行时分别对标准焊丝和振动焊丝进行预热,使得在焊丝进入熔池前提前进行预热。
68.本实施例的热丝电源采用tetrix 200smart hotwire,但不限于该型号。
69.本实施例中,通过设置热丝电源,并与送丝机、电气控制系统2和焊接电源连接,可提前对送进熔池的焊丝进行预热,提高熔池的流动性与堆焊效率,使得熔滴过渡更加容易。
70.可选的,本实施例基于脉冲协调的双钨极堆焊装置还包括两个冷却系统和工作台15;
71.两个所述冷却系统分别设置在所述双钨极焊枪14的两侧,所述冷却系统与所述电气控制系统2电连接,所述冷却系统用于基于所述电气控制系统2的控制,在焊接时对所述双钨极焊枪14进行降温;
72.所述工作台15为与所述电气控制系统2电连接的转台,且所述工作台15与所述双钨极焊枪14对应设置,用于固定工件16并在所述电气控制系统2的控制下带动所述工件16旋转运动。
73.具体地,由于双钨极焊枪14在焊接过程中热量会大幅度增加,若不进行降温处理则会影响焊接质量设置发生危险,因此,在双钨极焊枪14两侧分别设置了第一冷却系统12和第二冷却系统13,且第一冷却系统12和第二冷却系统13分别与电气控制系统2电连接。第一冷却系统12和第二冷却系统13可为冷却水系统或喷雾冷却系统,电气控制系统2控制第一冷却系统12和第二冷却系统13在焊接时对双钨极焊枪14进行降温冷却,保证堆焊生产正常进行。本实施例的冷却系统采用cool82 u44,但不限于该型号。
74.在焊枪中安装两根钨极,构成双钨极焊枪14。采用2m*2m焊接操作机作为整个系统的主体结构,焊枪运动滑架通过端部的连接板设置在主体架构与工作台15对应的端部,双钨极焊枪14通过连接板设置在操作机端头,与工作台15对应设置,以便对设置在工作台15上的工件16进行堆焊。
75.工作台15采用cz2*2型号的转台,与电气控制系统2电连接,电气控制系统2带动工作台15转动。工件16可设置在工作台15上,进行固定并带动工件16旋转,以使工件16进行焊接。
76.本实施例中,通过设置两个冷却系统,可有效对双钨极焊枪14进行降温冷却,避免焊枪温度过高影响焊接质量或造成事故,保证焊接质量的同时增加焊接效率。与双钨极焊枪14对应设置转动工作台15,可对工件16进行固定、转动调节焊接角度,以实现多种焊位的堆焊。
77.可选的,本实施例基于脉冲协调的双钨极堆焊装置还包括送气系统;
78.所述送气系统与所述双钨极焊枪14连接,所述送气系统与所述电气控制系统2电连接,且所述送气系统用于基于所述电气控制系统2的控制,在焊接时向所述双钨极焊枪14
输送保护气体。
79.具体地,本实施例中设置第一送气系统10和第二送气系统11,分别与电气控制系统2电连接。第一送气系统10与第一送丝机6通过送气管道连接,第二送气系统11与第二送丝机7通过送气管道连接,且分别与双钨极焊枪14连接,电气控制系统2控制第一送气系统10和第二送气系统11在第一送丝机6和第二送丝机7进行送丝时分别向双钨极焊枪14输送保护气体,例如二氧化碳、氩气等,作为产生电弧的气体介质。
80.本实施例中,通过设置送气系统并与双钨极焊枪14连接,可在焊接过程中向双钨极焊枪14输送保护气体,作为产生电弧的气体介质,增加焊接效率,同时避免材质氧化,提高焊缝质量。
81.如图4所示,本实施例还提供了一种基于脉冲协调的双钨极堆焊方法,其特征在于,基于如上述所述的基于脉冲协调的双钨极堆焊装置,所述基于脉冲协调的双钨极堆焊方法包括:
82.步骤s1、利用触发器3获取焊接参数,并根据所述脉冲参数分别对两个所述焊接电源进行脉冲调节,其中所述脉冲调节包括脉冲形式调节和相位差调节,所述焊接参数根据工件的焊接位置得到,所述焊接参数包括脉冲参数和振动频率;
83.步骤s2、利用送丝机根据所述焊接电源的脉冲和所述振动频率进行送丝;
84.步骤s3、利用双钨极焊枪14在所述送丝机送丝时进行堆焊。
85.具体地,在执行步骤s1之前,操作员需根据工件16的焊接位置确定焊接参数,焊接参数包括两个焊接电源的脉冲种类、峰值电流、基值电流、电弧电压、脉冲频率、热丝电流、振动频率、焊接速度送丝速度和相位差,并将各参数输入操作面板1中,操作面板1将焊接参数发送至电气控制系统2,触发器3根据电气控制系统2获取的焊接频率,根据其中的脉冲参数和振动频率分别对两个焊接电源进行脉冲调节,即两个焊接电源的脉冲形式(脉冲或非脉冲)和相位差。步骤s2中,两个焊接电源的输出脉冲调节完成后,两个送丝机分别根据输出的电流和振动频率进行脉动振动送丝,实现送丝速度的调节。
86.为验证本实施例基于脉冲协调的双钨极堆焊装置的性能,下面以工件的横焊位焊接进行试验:
87.设置焊接参数:i
p1
=i
p2
=260a,i
b1
=i
b2
=100a,v
弧压
=10.5v,f1=f2=5hz,i
h1
=i
h2
=60a,f1=f2=10hz,v
焊
=220mm/min,v
送1
=v
送2
=5000mm/min,α=0
°
,θ1=θ2=180
°
。
88.其中,i
p1
和i
p2
分别表示第一焊接电源4和第二焊接电源5的峰值电流,i
b1
和i
b2
分别表示第一焊接电源4和第二焊接电源5的基值电流,v
弧压
表示电弧电压,f1和f2分别表示第一焊接电源4和第二焊接电源5的脉冲频率,i
h1
和i
h2
分别表示第一热丝电源8和第二热丝电源9的热丝电流,f1和f2分别表示第一焊接电源4和第二焊接电源5的振动频率,v
焊
表示焊接速度,v
送1
和v
送2
分别表示第一送丝机6和第二送丝机7的送丝速度,α表示焊枪倾角,θ1和θ2分别表示第一焊接电源4和第二焊接电源5输出脉冲的相位差。
89.触发器3获取上述焊接参数后,分别对第一焊接电源4和第二焊接电源5的输出电流进行调节,第一送丝机6和第二送丝机7分别根据第一焊接电源4和第二焊接电源5输出的电流进行脉动振动送丝,双钨极焊枪14根据送丝速度、焊枪倾角和焊接速度进行焊接,得到如图3所示的焊缝成型,由此,本实施例基于脉冲协调的双钨极堆焊装置焊接质量高、操控简单、智能化程度高、效率高。
90.本实施例中,利用触发器3获取焊接参数,并根据焊接参数和振动频率对分别对两个焊接电源实施不同电流大小、脉冲调制、空间位置的协同作用,使得送丝机根据调节后的输出电流进行送丝速度的调节,以提高熔池的流动性与堆焊效率,使得熔滴过渡更加容易。同时,振动送丝对熔池具有搅拌作用,起到细化晶粒,使得堆焊层组织均匀,优化焊缝成型,保证高质量生产的同时,使得堆焊效率成倍增加。
91.可选地,所述根据工件的焊接位置得到焊接参数的方法包括:
92.根据所述焊接位置得到所述焊接特性;
93.根据所述焊接特性得到脉冲组合;
94.根据所述脉冲组合得到所述焊接参数。
95.具体地,根据堆焊数据统计,本实施例总结了7种脉冲组合,如图5至图11所示,为7中脉冲组合的电流形态表示,其中i1为第一焊接电源4,i2为第二焊接电源5。图5为第一脉冲组合:dc+dc,第一焊接电源4和第二焊接电源5均为直流;图6为第二脉冲组合:dc+p,第一焊接电源4为直流,第二焊接电源5均为脉冲;图7为第是三脉冲组合:p+dc,第一焊接电源4为脉冲,第二焊接电源5均为直流;图8为第四脉冲组合:p0+p0,第一焊接电源4和第二焊接电源5均为脉冲,且相位差为0
°
;图9为第五脉冲组合:p180+p180,第一焊接电源4和第二焊接电源5均为脉冲,且相位差为180
°
;图10为第六脉冲组合:pv+pv,第一焊接电源4和第二焊接电源5均为脉冲,且相位差为可为自定义;图11为第七脉冲组合:pt+pt,第一焊接电源4和第二焊接电源5均为脉冲,且两个脉冲具有提前和之后的相位差,其中t1为提前相位差,t2为滞后相位差。在后续的堆焊过程中,直接调取脉冲组合进行输入即可,可有效提升堆焊效率。
96.在堆焊中,工件16的焊接位置包括平焊位、横焊位、仰焊位等,分别具有不同的焊接特性,例如横焊位时,熔池金属在重力作用下流向焊道下侧,此时,在焊道下侧容易出现未熔透、焊瘤等缺陷,焊道上侧往往出现咬边等缺陷,仰焊位时,熔池金属在重力作用下极易滴落,因此,在仰焊时实现高速焊接的关键是如何合理控制熔池的凝固过程。
97.根据脉冲特性,选择对应的脉冲组合进行堆焊,例如,在平焊过程中,两钨极对称分布于焊缝中心轴线两侧。为了保持焊接过程稳定以及焊道两侧熔池金属连续,两焊接电源保持相同脉冲电流输出,并保证180
°
相位差,故采用图9所示的双脉冲组合(p180+p180),通过电弧对熔池的搅拌作用,可有效改善焊缝组织性能。在横焊过程中采用脉冲电流控制的方式,焊道下侧钨极采用大电流输出,既可保证下侧焊道获得足够的熔深,又可借助电压压力的作用抑制熔池金属向下流动;焊道上侧钨极采用小电流输出,熔池金属在下侧较大电弧压力的作用下向上流动,可以降低上侧焊道的咬边程度,故采用图8所示的双脉冲组合(p0+p0),通过合理分配两个焊接电源的电流输出形式,在保证高熔敷的条件下,可获得表面成型良好的焊缝,根据工艺要求,适当调节两个钨极电流的大小即可实现焊接,保证横焊位的焊缝成形优良。在仰焊过程中,可以通过控制焊枪摆动与钨极脉冲电流同步,解决横焊位特性问题。当焊枪摆动停止在焊道一侧时,靠近该侧的钨极电流取脉冲峰值,另一个钨极电流取脉冲基值;当焊枪摆动时,两个焊接电源输出电流均取脉冲基值。故采用图5、图6和图7所示的脉冲组合控制模式,既可以保证焊缝获得足够的熔深,又可以在较低焊接热输入条件下,防止熔池金属过多而滴落。根据工艺要求,适当调节两个钨极电流的大小即可实现焊接,保证横焊位的焊缝成形优良。在选择合适的脉冲组合后,再根据具体情况进行脉冲参
数和振动频率的调节。
98.本实施例中,通过工件16焊接位置确定焊接特性,针对焊接特性选择对应的脉冲组合,在根据实际情况对脉冲组合中的具体脉冲参数进行调节,可以有效增加堆焊的质量,且无需进行实时调整,增加了堆焊效率。
99.可选地,本实施例基于脉冲协调的双钨极堆焊方法还包括:
100.获取监控装置发送的初始焊接信息和实时焊接信息;
101.将所述实时焊接信息与所述初始焊接信息进行比较,根据比较结果判断是否存在堆焊风险。
102.具体地,利用操作面板1实时获取监控装置发送的实时焊接信息,且在堆焊装置运行前,监控装置获取初始焊接信息并发送至操作面板1,操作面板1将初始焊接信息和实时焊接信息进行比较,若实时焊接信息与初始焊接信息不同,则此时工件位置或焊枪位置出现了变化,若此时仍进行堆焊,则导致焊接质量降低,判断存在焊接风险,停止焊接。
103.另外地,在堆焊装置获取焊接参数后、运行前,监控装置获取此时的焊接信息并发送至操作面板1,操作面板1与设定的焊接参数进行比较,若此时的焊接信息符合设定的焊接参数(例如根据设定的焊接参数模拟焊枪位置和工件位置,若模拟的焊枪位置和工件位置与初始焊接信息相同,则符合),则开始进行堆焊,可有效保证焊接质量,避免堆焊装置出现故障导致批量产品质量问题。
104.本实施例中,根据监控装置获取的实时焊接信息和初始焊接信息进行比较,并做处风险判断,可有效避免双钨极焊枪14和工件16在堆焊过程中发生位置变化,导致工件16堆焊质量降低。
105.虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1